點選進入Q霸小車示範專案(上集)
 應用11: micro:bit遙控器
應用11: micro:bit遙控器- 使用另一個micro:bit中的按鈕,控制Q霸小車的方向。
- 兩個micro:bit都需要編程。
材料MicroSoft Makecode
程式設計
步驟一
- 點選「Advanced」在MakeCode欄目中查看更多選擇。
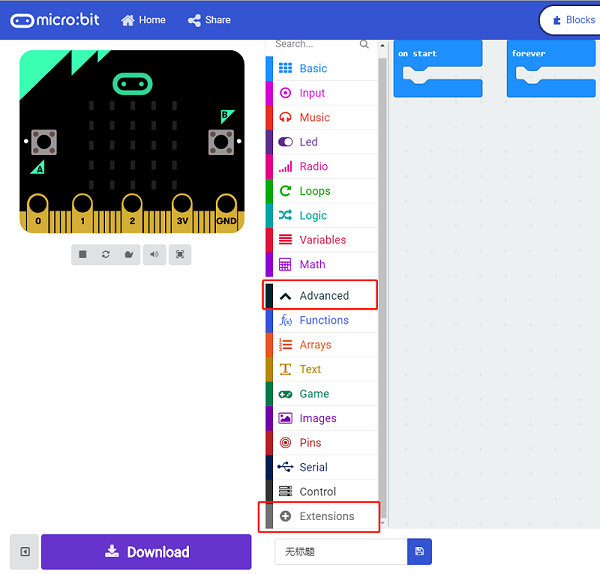
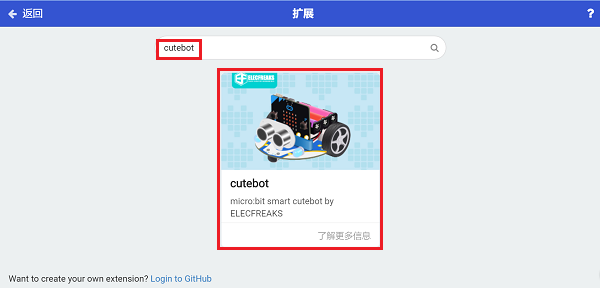
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
 注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
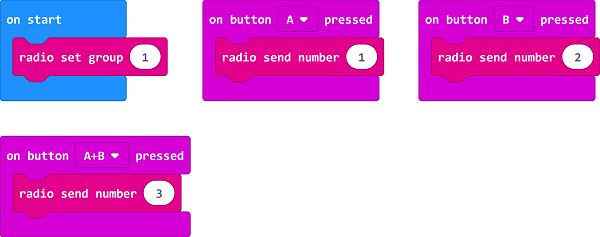
步驟二:遙控編程
- 在On start設定「radio set group」為1。
- 按下按鈕A時發送無線電號碼1。
- 按下按鈕B時發送無線電號碼2。
- 按下按鈕A + B時發送無線電號碼3。
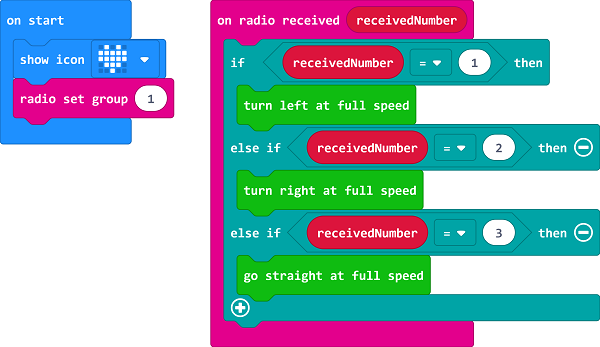
步驟三:Q霸小車編程
- 拖曳「show icon」積木進On start,設定「radio set group」為1,項目必須與遙控器相同才能正確匹配。
- 拖曳三個「if」積木進on radion received,判斷接收到的數字1、2或3。
- 收到的號碼為1時,向左轉。
- 收到的號碼為2時,向右轉。
- 收到的號碼為3時,繼續直行。
結果- 按遙控器上的按鈕A + B時,Q霸小車會直線前進。
- 按遙控器上的按鈕A時,Q霸小車向左轉。
- 按遙控器上的按鈕B時,Q霸小車向右轉。
結果影片
應用12: 使用micro:bit加速計遙控Q霸小車 目的- 使用另一個micro:bit中的加速度計遙控Q霸小車的方向和速度。
- 兩個micro:bit都需要編程。
材料MicroSoft Makecode
程式設計
步驟一
- 點選「Advanced」在MakeCode欄目中查看更多選擇。
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
步驟二:遙控編程
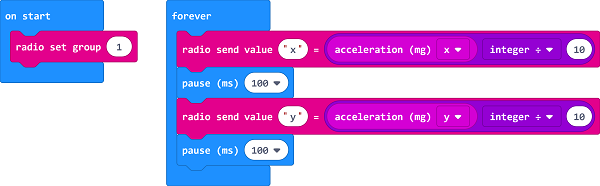
- 在On start中設定「radio set group」為1 。
- 設定由forever中無線電變數由「acceleration (mg) x」除以10後給出的x值。
- 設定由forever中無線電變數由「acceleration (mg) x」除以10後給出的y值。
- 加速度值的範圍為0〜1024,除以10後大約為0〜100。
- 在On start中設定「radio set group」為1。項目必須與遙控器相同才能正確匹配。
- 將兩個「if」積木拖曳進on radio received中,判斷無線電接收的數值name是x或y。
- 如果無線電接收的值name是x,則為X的數據,將此value保存到變數xValue。
- 如果無線電接收的值name是y,則為y的數據,將此value保存到變數yValue。
- 在forever積木塊中,設定左輪速度為yValue+xValue;設定右輪速度為yValue-xValue。
結果
- Q霸小車的移動方向由micro:bit的傾斜度控制。
- 由micro:bit控制的傾斜角度控制Q霸小車的速度。
結果影片
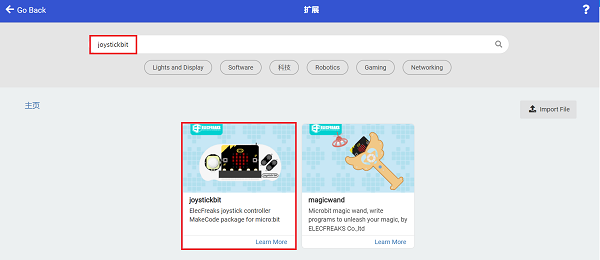
應用13: 使用Joystick:bit(擴充搖桿)遙控
目的
使用joystick:bit控制Q霸小車。
材料
- 1 x Q霸小車套件
- 1 x Joystick:bit2
MicroSoft Makecode
程式設計
步驟一
- 點選「Advanced」,在MakeCode欄目中查看更多選擇。
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
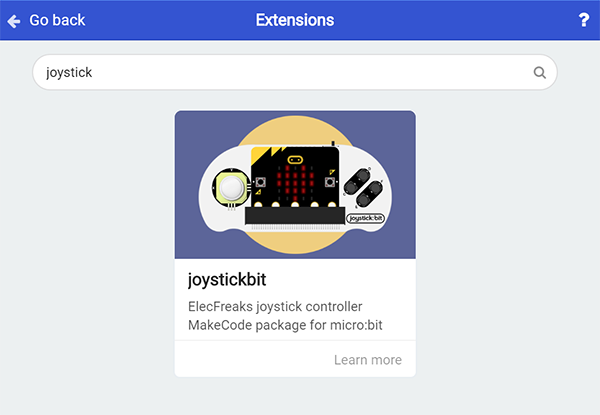
- 另外需要一個遙控桿的編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋joystick並下載。
 注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
步驟二:Joystick:bit編程
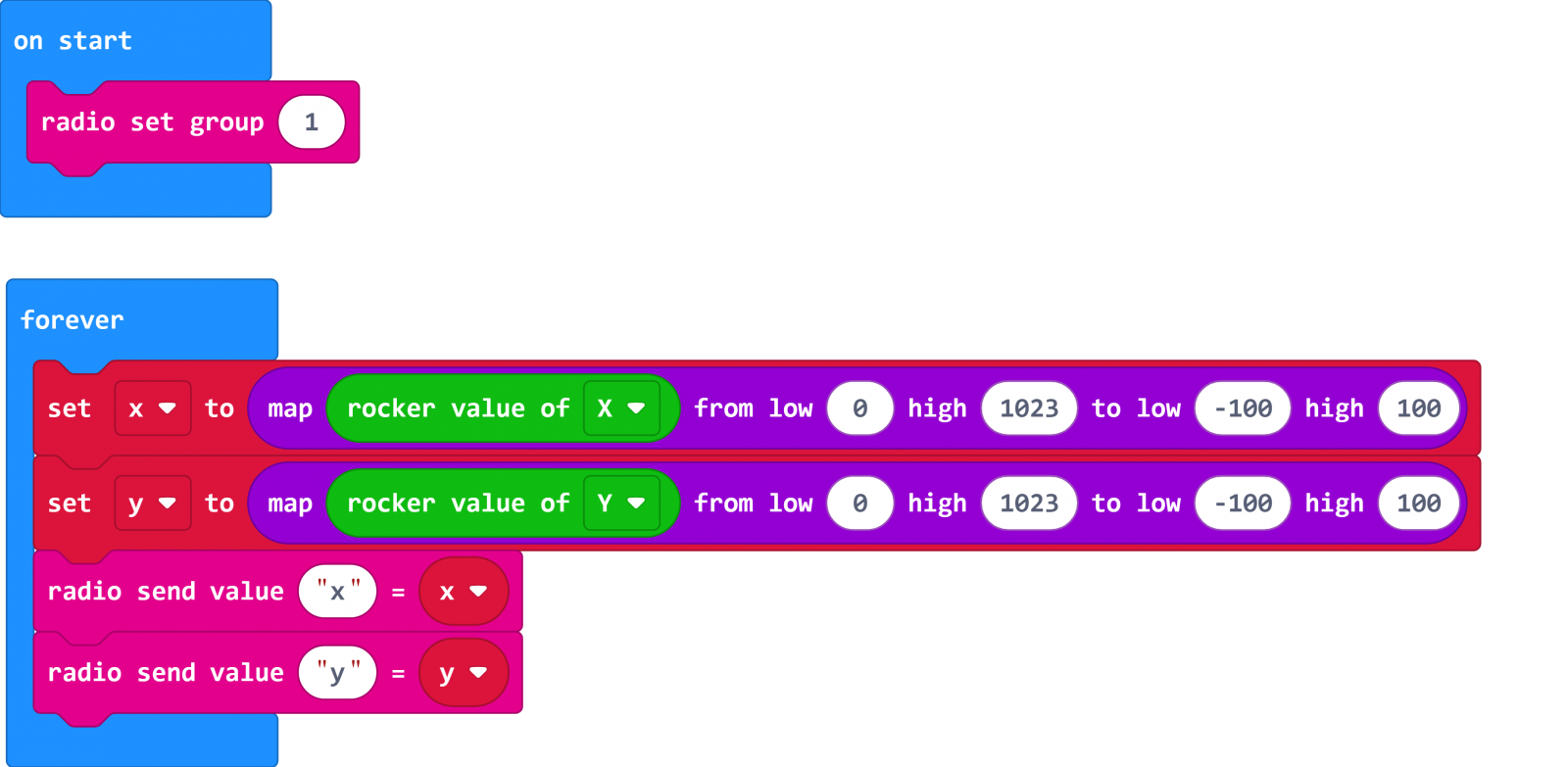
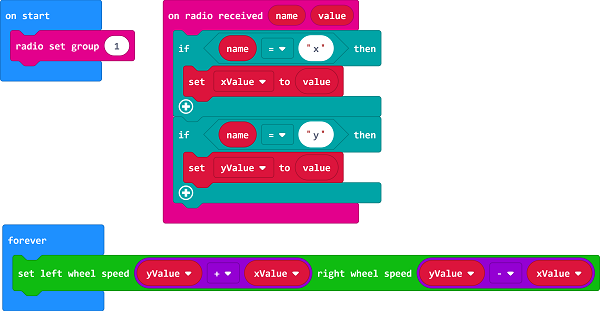
- 在On start中設定「radio set group」為1 。
- Joystick:bit其X軸和Y軸的範圍是0~1023, 當搖桿位於中心的時候,它的理論值是512,因此需要讓0〜1023map(對應)到Cutebot的內建速度值-100~100(負值代表反方向的速度)這個範圍之內。
- 在forever中設置變數x,它的值為:將Joystick:bit其x軸的讀取值對應到Cutebot的速度-100~100這個範圍內的值。
- 在forever中設置變數y,它的值為:將Joystick:bit其y軸的讀取值對應到Cutebot的速度-100~100這個範圍內的值。
- 透過radio(廣播)將變數x和變數y傳送出去。
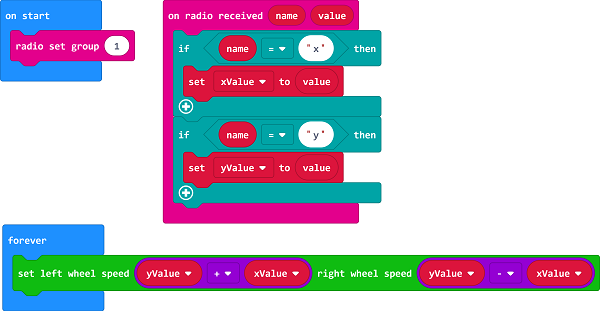
- 將On start中的「radio set group」設定為1。項目必須與遙控器相同才能正確匹配。
- 將兩個「if」積木塊拖曳到on radio received中,判斷無線電接收的值name是x或y。
- 如果無線電接收的值name是x,則為X的數據,將value保存到變數xValue。
- 如果無線電接收的值name是y,則為y的數據,將value保存到變數yValue。
- 在forever中,設定左輪速度為yValue+xValue;設定右輪速度為yValue-xValue。
結果
搖桿控制Q霸小車的運動。結果影片
應用14: 紅外線遙控汽車
目的
使用紅外遙控器向Q霸小車下達指令。
材料
步驟一
- 點選「Advanced」,在MakeCode欄目中查看更多選擇。
- 我們需要新增用於編程的軟體包,點選欄目底部的「Extensions」,在對話框中搜尋「 Cutebot」並下載。
注意:如果遇到不相容將刪除編碼庫的提示,可照提示操作或建立新專案。
步驟二
步驟三
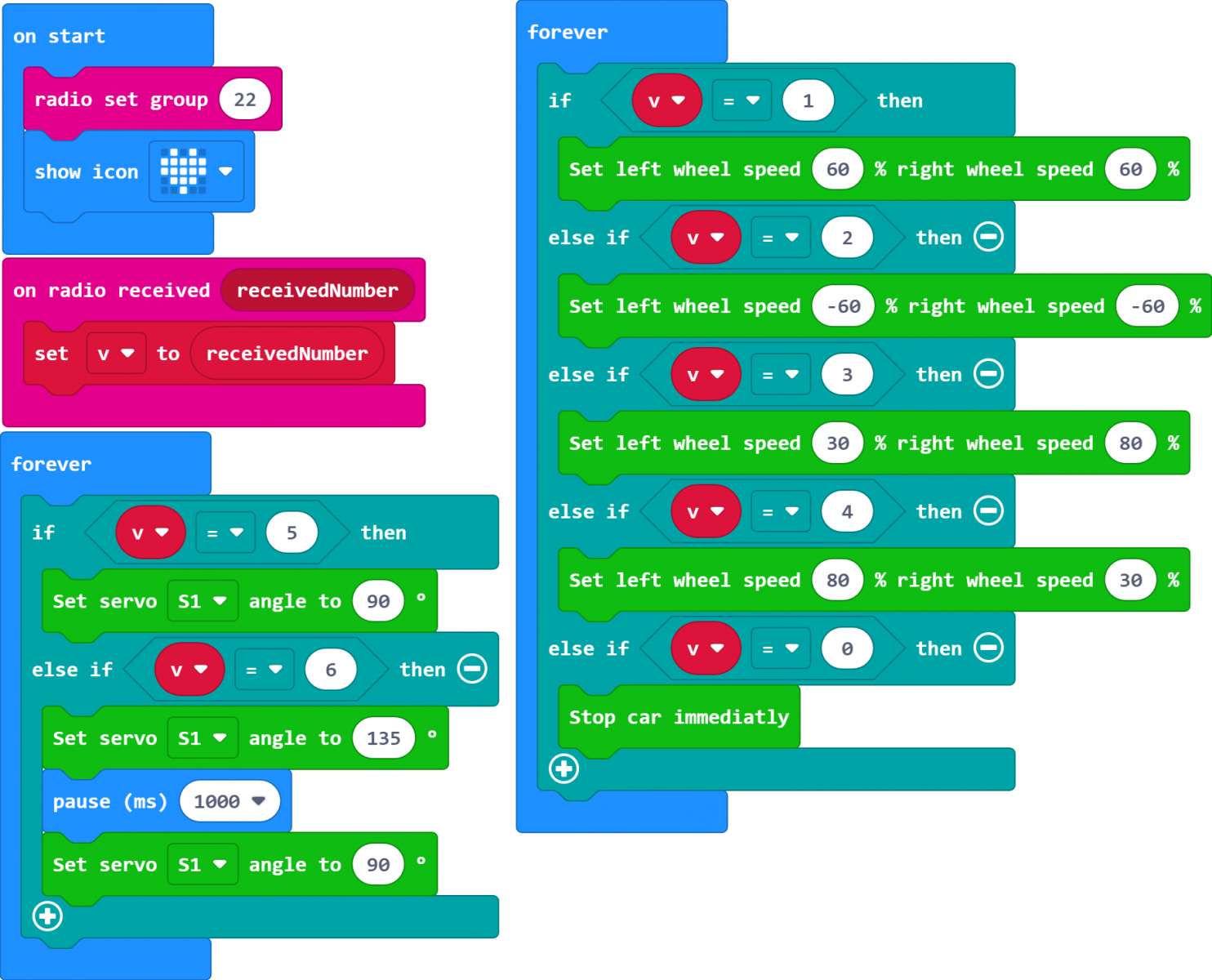
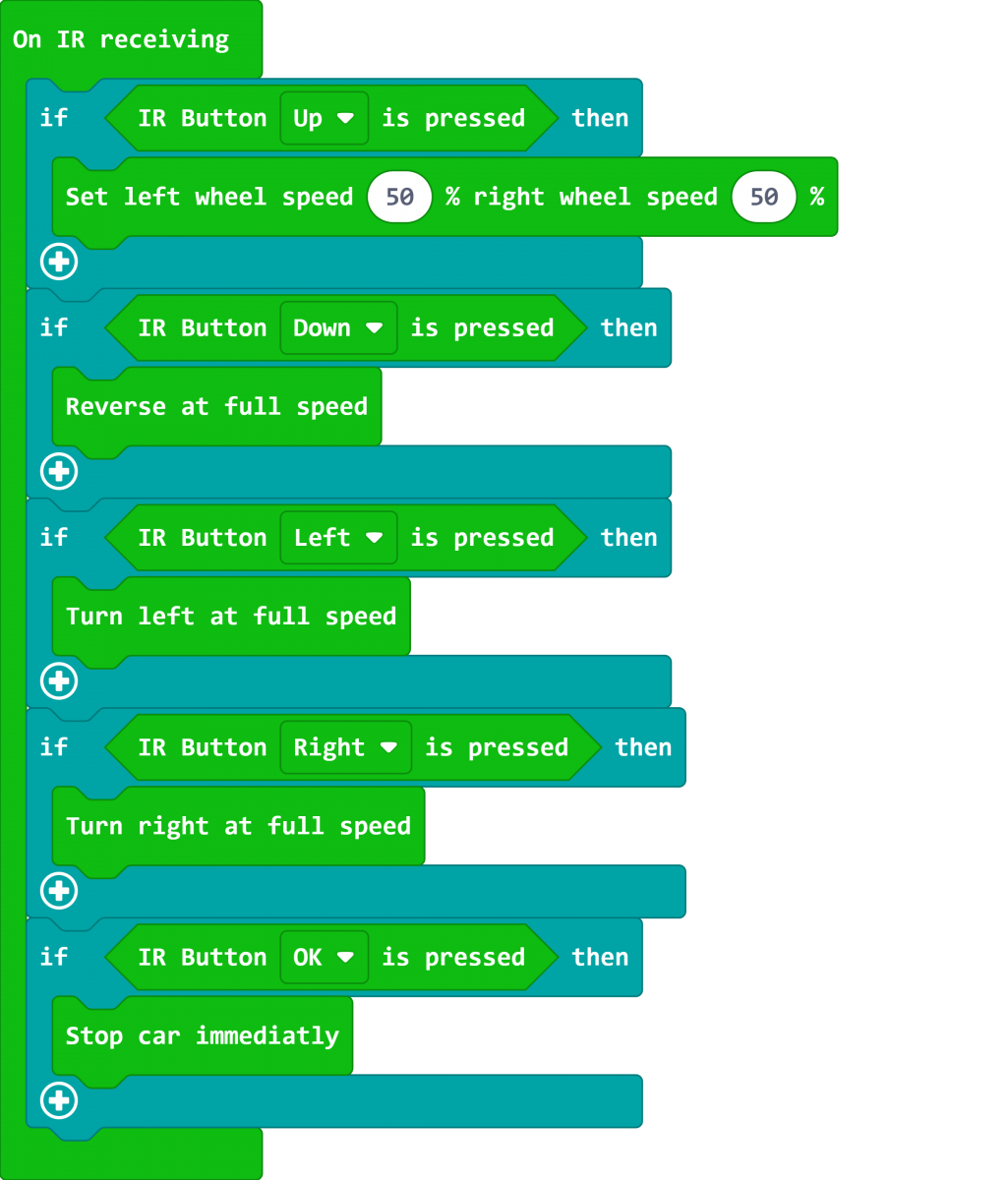
- 設定按下遙控器的「up」按鈕時,汽車向前行駛;按下「down」按鈕時全速後退;按下「Left」按鈕時全速左轉;按下「Right」按鈕時全速右轉;按下「OK」按鈕同時立即停止。
結果
程式使用紅外線遙控器發出向前、向後、向左、向右和停車的指令。結果影片
應用15: 尋找光線 目的
程式讓Q霸小車自動尋找光源。
材料MicroSoft Makecode
程式設計
步驟一
- 點選MakeCode欄目中的「Advanced」查看更多選擇。
- 我們需要新增用於編程的軟體包,點選欄目底部的「Extensions」,在對話框中搜尋「Cutebot」並下載。
注意:如果遇到因不相容將刪除編碼庫的提示,可按照提示操作或建立新專案。 步驟二
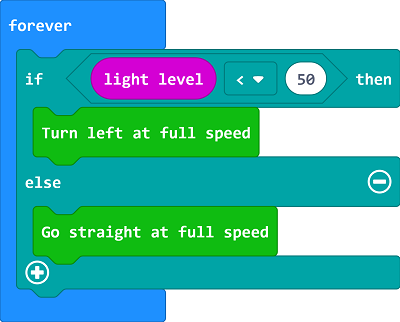
- 在「forever」中用「light level」判斷光線強度;如果該值低於設定點,將Q霸小車設定為全速左轉;反之則全速前進。
結果
如果未感測到光線,Q霸小車原地旋轉,反之則全速前進。結果影片
應用16: 物品抓取小車 目的
使用Q霸智能小車搭配機械爪來製作一輛擁有抓取物品功能的小車。材料機械爪安裝步驟 機械爪連接方式將機械爪連接到Q霸小車的S1接口。
機械爪連接方式將機械爪連接到Q霸小車的S1接口。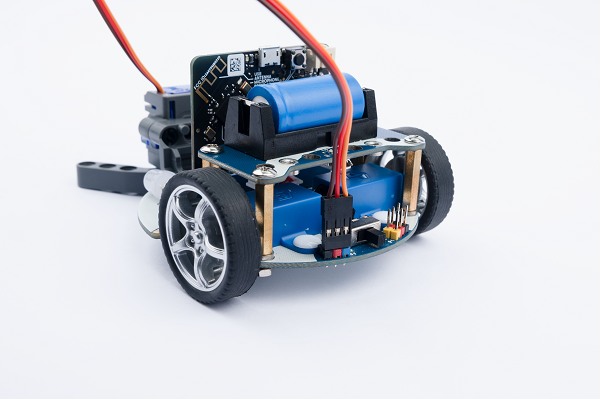 MicroSoft Makecode
MicroSoft Makecode
程式設計
步驟一
- 點選MakeCode欄目中的「Advanced」查看更多選擇。
- 為了給Joystick:bit V2 編程我們需要新增用於編程的軟體包,點選欄目底部的「Extensions」,在對話框中搜尋「Joystick:bit」並下載。
 注意:如果遇到因不相容將刪除編碼庫的提示,可按照提示操作或建立新專案。
注意:如果遇到因不相容將刪除編碼庫的提示,可按照提示操作或建立新專案。
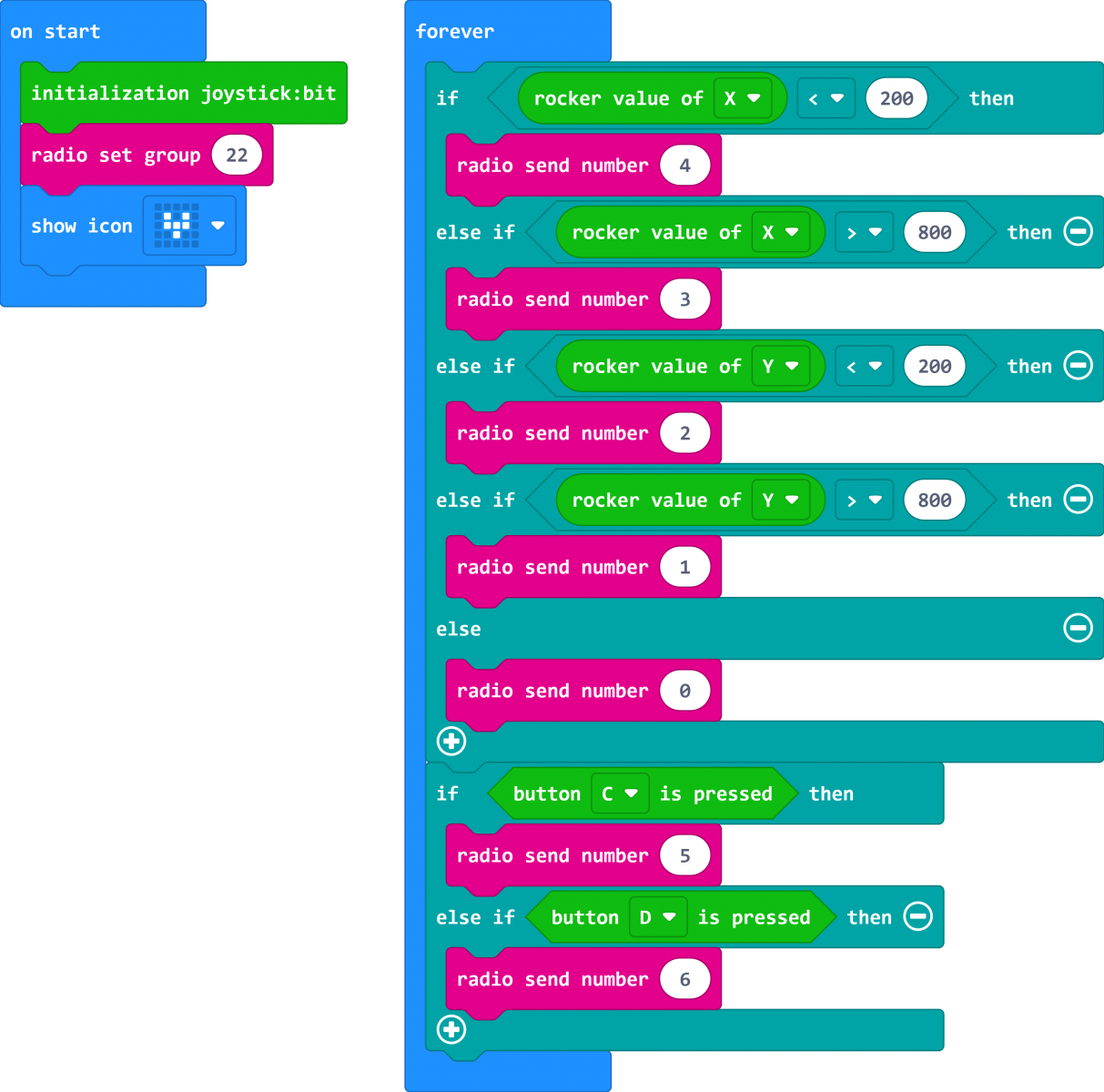
步驟二 - 小車端
步驟三 - 遙控端
結果
如果透過遙控器的搖桿控制小車的行駛方向,需按下遙控器的C、D按鍵控制機械爪的張開和抓取動作。
應用17: 生氣的Q霸 目的
透過8×16點陣螢幕顯示表情。
材料
- 1 × Cutebot 智能小車
- 1 × ELECFREAKS 8x16 Matrix Module 矩陣模組
將8*16點陣螢幕插入cutebot智能小車的IIC接口,需要注意連接接口是否正確。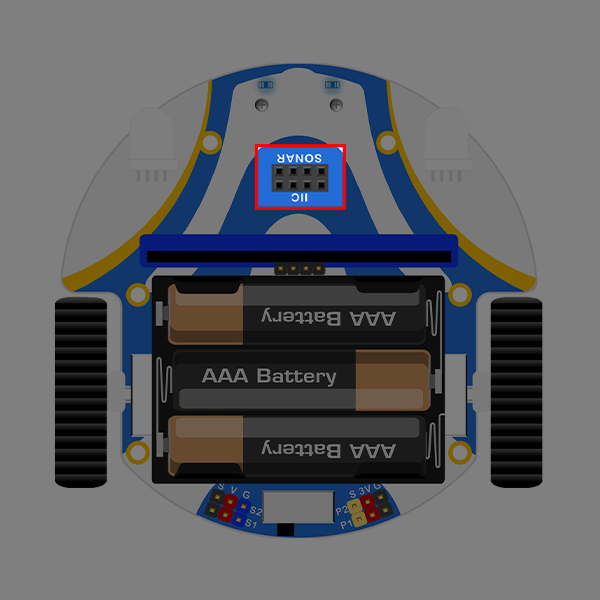
程式設計
步驟一
- 點選「Advanced」,在MakeCode欄目中查看更多選擇。
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
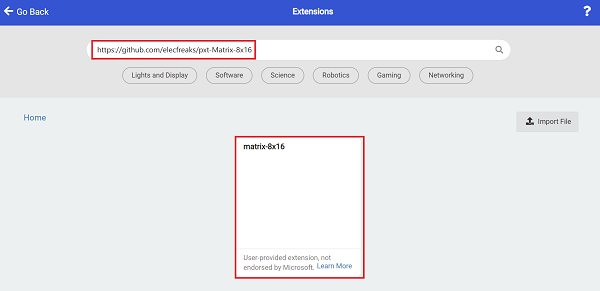
- 為了對8*16點陣螢幕進行編程,需另外新增代碼庫。在欄目底部找到「Extensions」,點選後會彈出一個對話框。請搜尋並下載:https://github.com/elecfreaks/pxt-Matrix-8x16
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
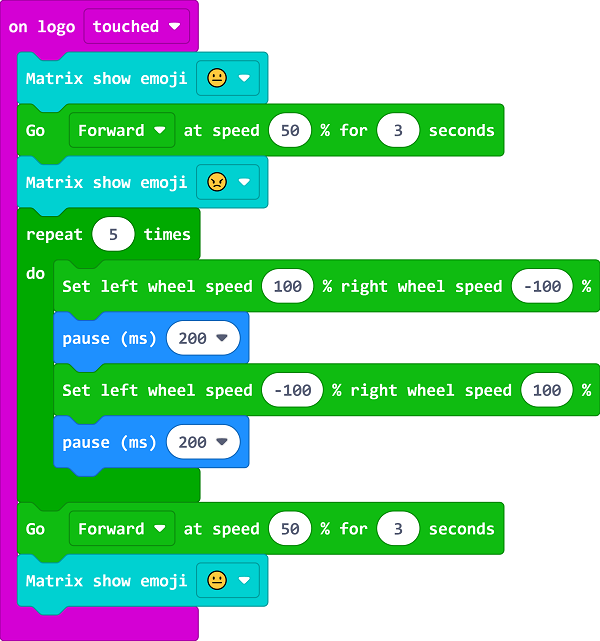
步驟二
結果
觸摸 micro:bit V2 標誌時,8x16點陣螢幕會顯示表情,cutebot 小車會向前行駛。