應用08: 循線前進
應用08: 循線前進
目的
讓您的Q霸小車能夠循著黑線繞圈前進。
材料
步驟一
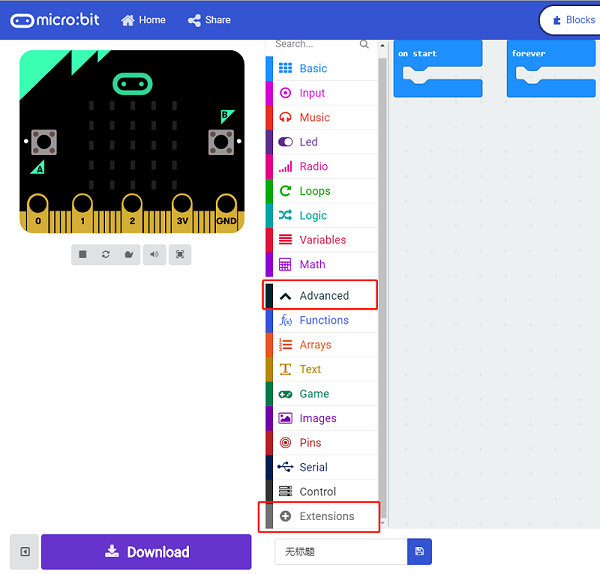
- 點選「Advance」,在MakeCode欄目中查看更多選擇。
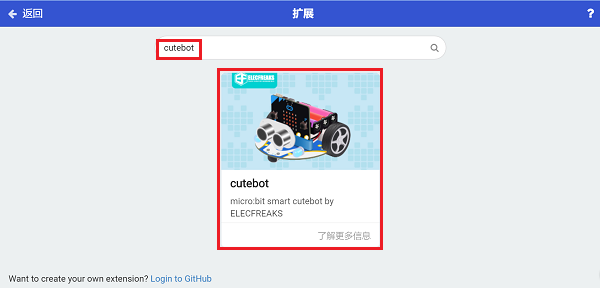
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
步驟二
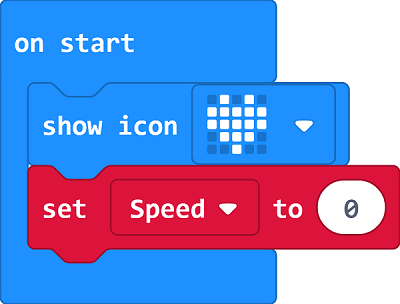
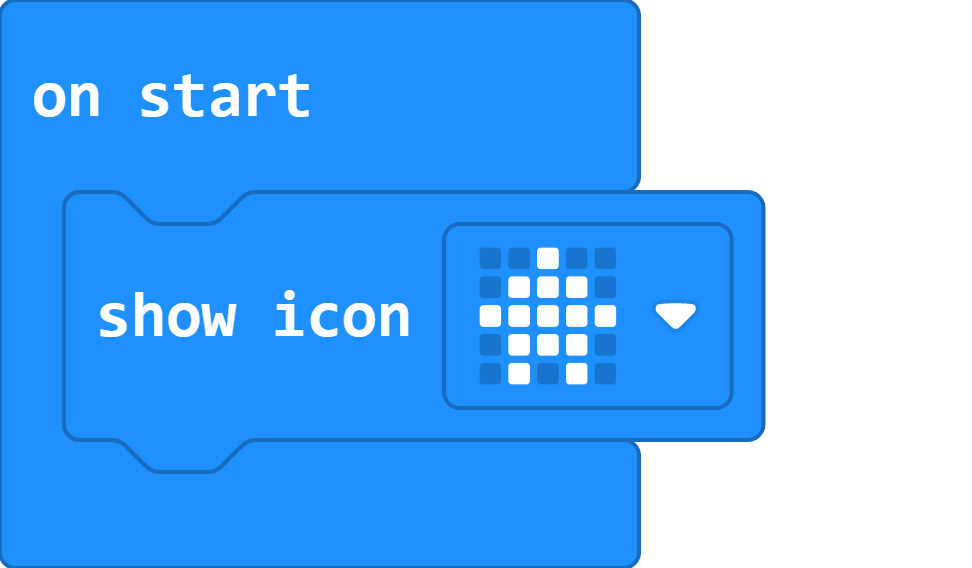
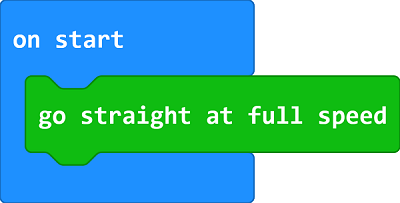
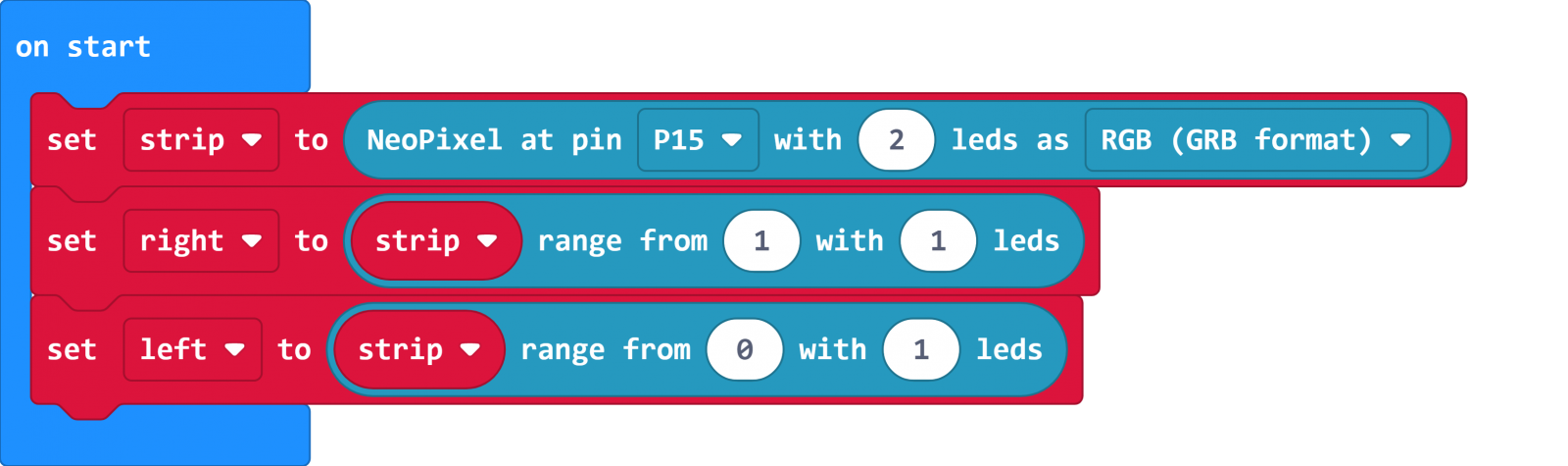
- 在On start中利用show icon設計一個圖案。
步驟三
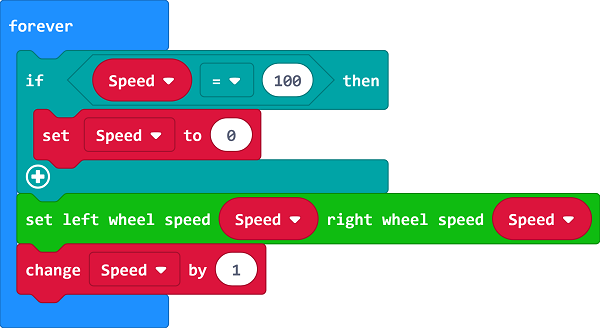
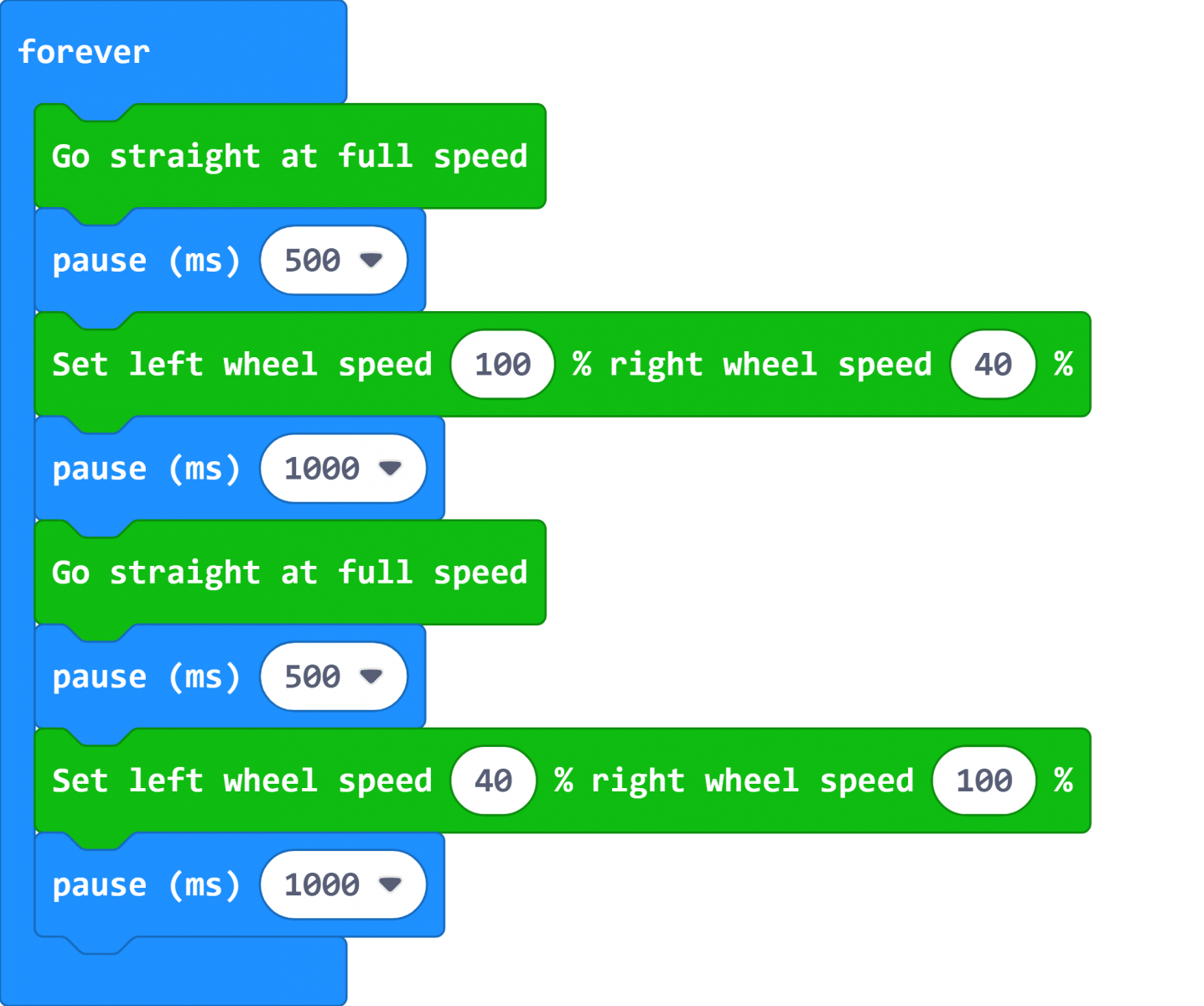
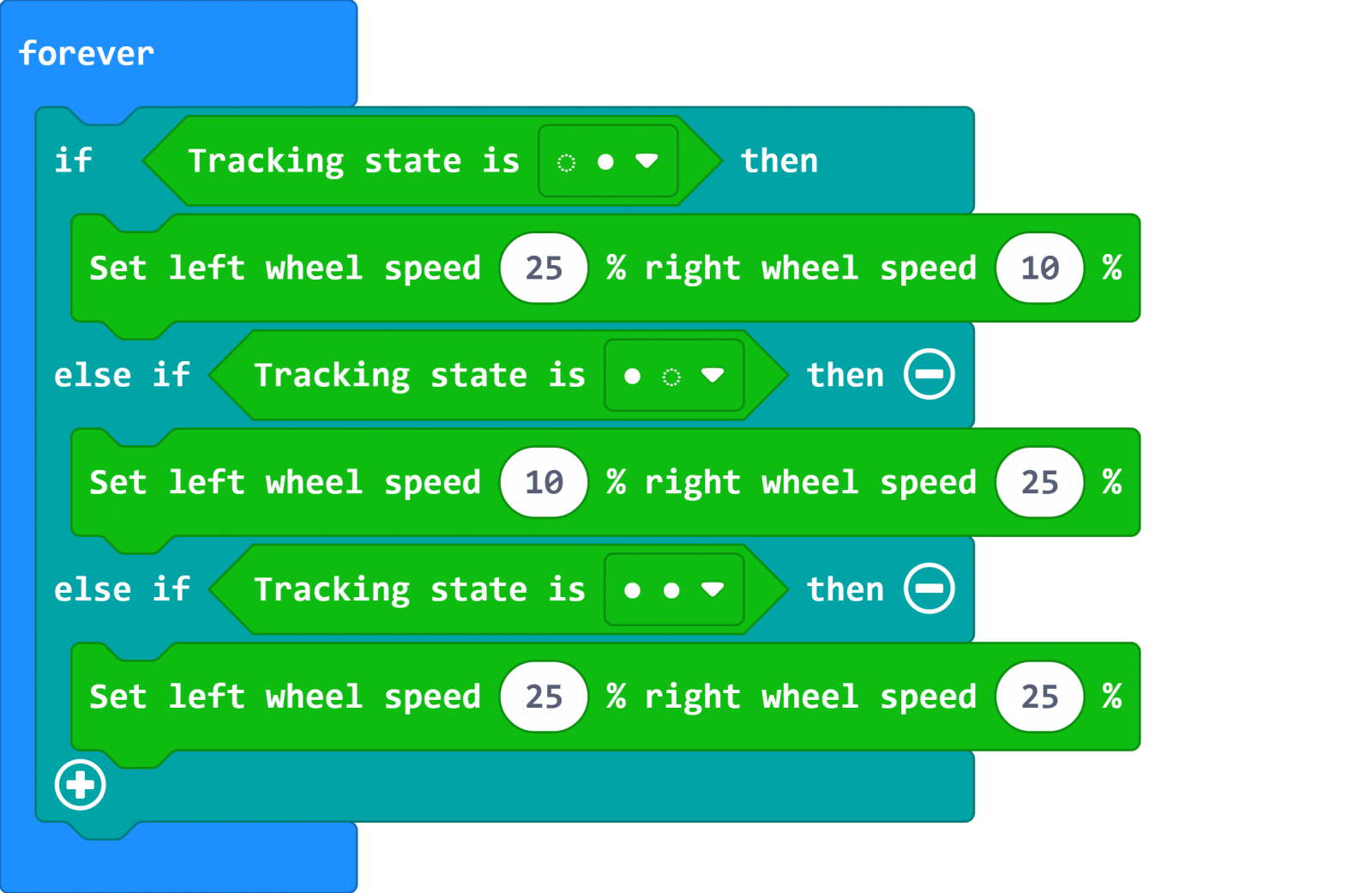
在forever(重複執行)積木,建立if~else(如果~否則)的判斷積木,用if來判斷小車是否檢視到黑線。Q霸小車會藉由判斷尋跡感測器的狀態(偵測到為●●、○●或是●○),來決定其前進的方向。
當右邊檢測到黑線時(○●),設置左輪的速度>右輪,使其能向右轉;當左邊檢測到黑線時(●○),設置右輪的速度>左輪,使其能向左轉;當左右兩邊都檢測到黑線時(●●),將左、右輪設置為相同速度,使其能保持前進。
結果Q霸小車會藉由判斷尋跡感測器的狀態,來決定其前進的方向。當偵測到為●●時,代表Q霸小車在黑線上,因此會沿著黑線繼續前進;當偵測到為○●或是●○時,則代表位置已偏離,Q霸小車會加以調整方向使其回到黑線上繼續前進。結果影片
應用09: 自動避障
目的
讓您的Q霸小車能夠自動避障並持續行駛。
材料
步驟一
- 點選「Advance」,在MakeCode欄目中查看更多選擇。
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
步驟二
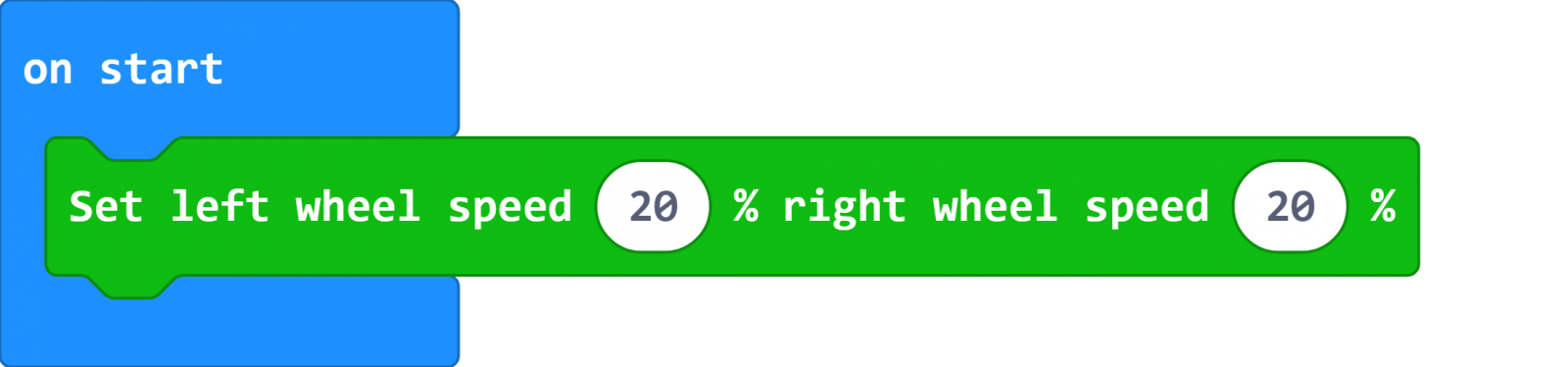
- 首先在on start(在開始時執行)中將小車設置為以20%的速度前進。
步驟三
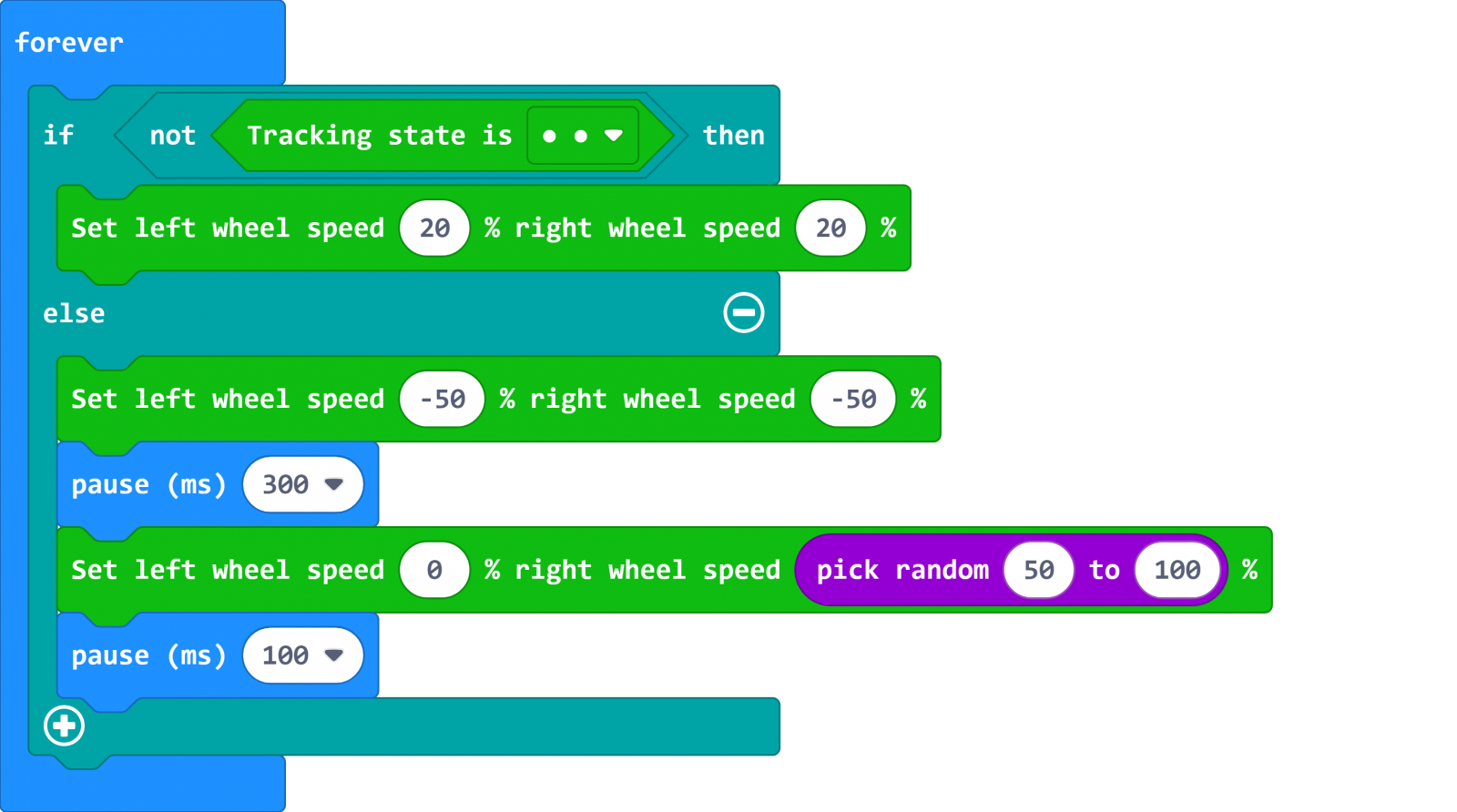
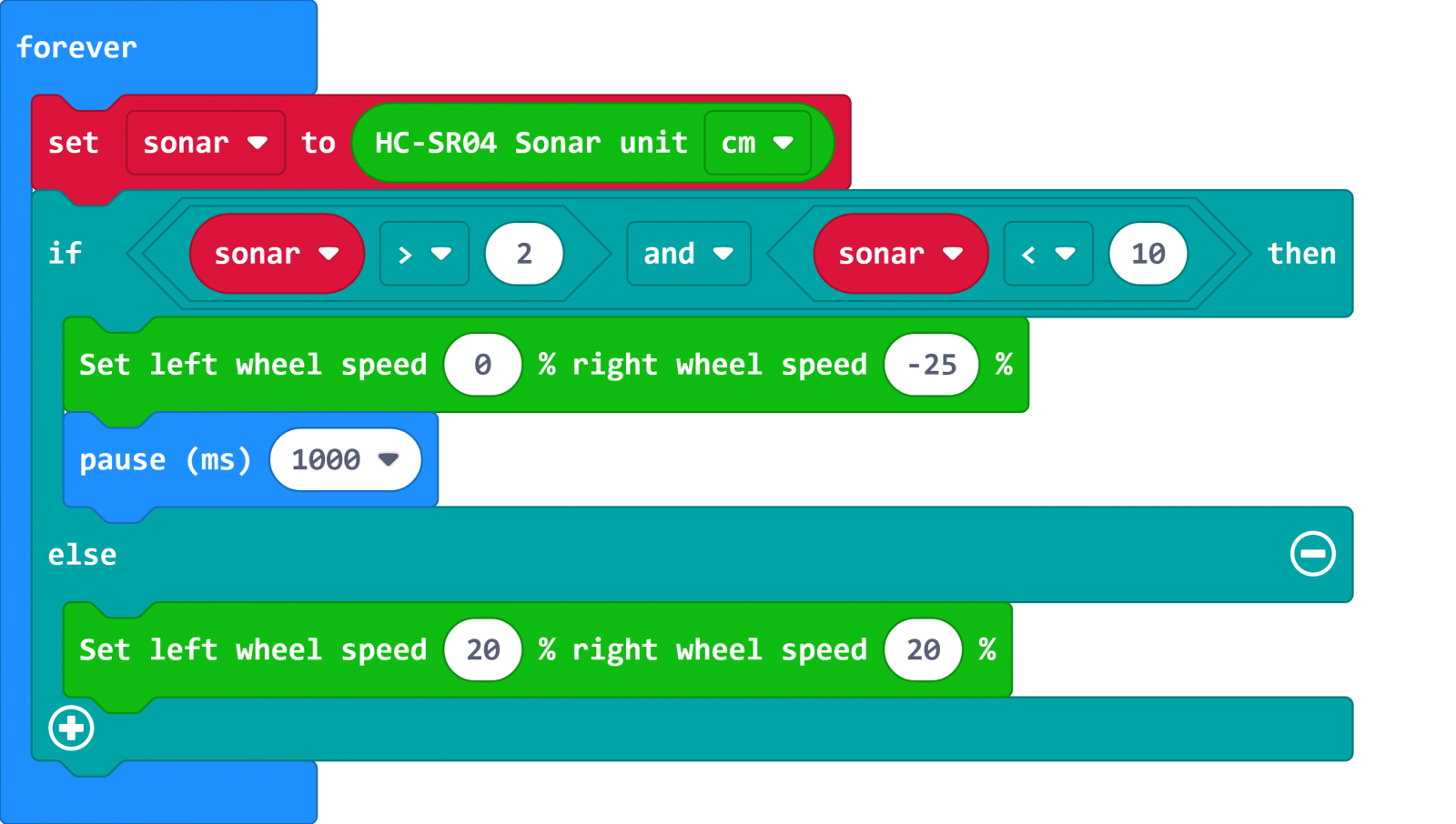
- 在forever(重複執行)積木,建立if~else(如果~否則)的判斷積木。接著建立變數:sonar,將它設定為超音波感測器偵測到的cm數值。用if來判斷偵測到的距離,如果超音波感測器(sonar)判斷到的cm數值是>2且<10之間,Q霸小車將往左後方倒退1秒以避開障礙物,接著繼續前進。
結果當Q霸小車藉由超音波感測器(sonar)判斷物體過於接近時,Q霸小車將往左後方倒退1秒以避開障礙物,接著繼續前進。結果影片 探索
探索
思考看看,為什麼必須設計讓Q霸小車其感測sonar的數值>2呢?
應用10: 保持車距
目的
讓您的Q霸小車能夠自動與前方保持一定車距前進。
材料
步驟一
- 點選「Advance」,在MakeCode欄目中查看更多選擇。
- Q霸小車編程需要一個編碼庫,點選欄目底部的「Add Package」,在對話框中搜尋Cutebot並下載。
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。
步驟二
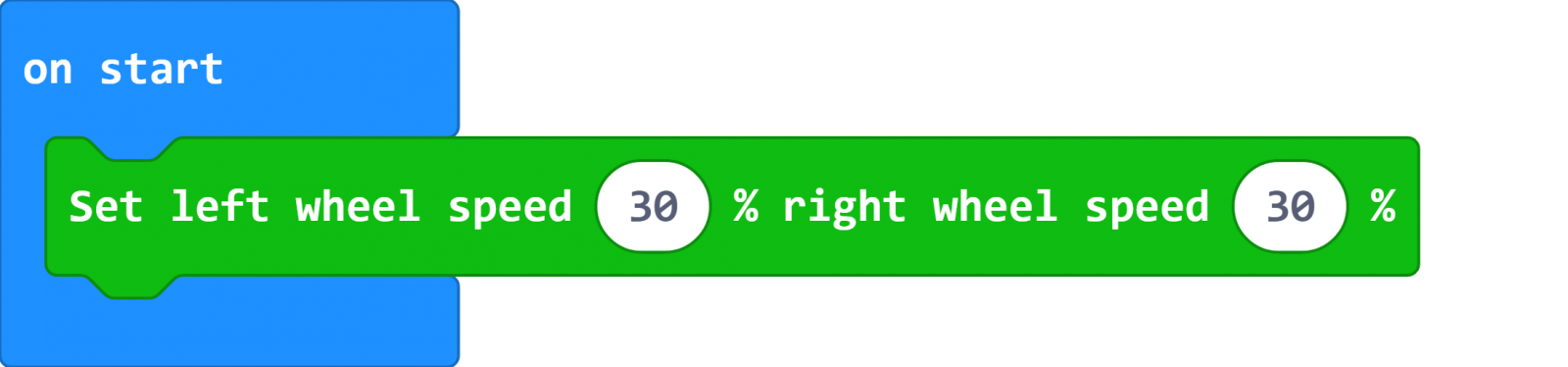
- 首先在on start(在開始時執行)中將小車設置為以30%的速度前進。
步驟三
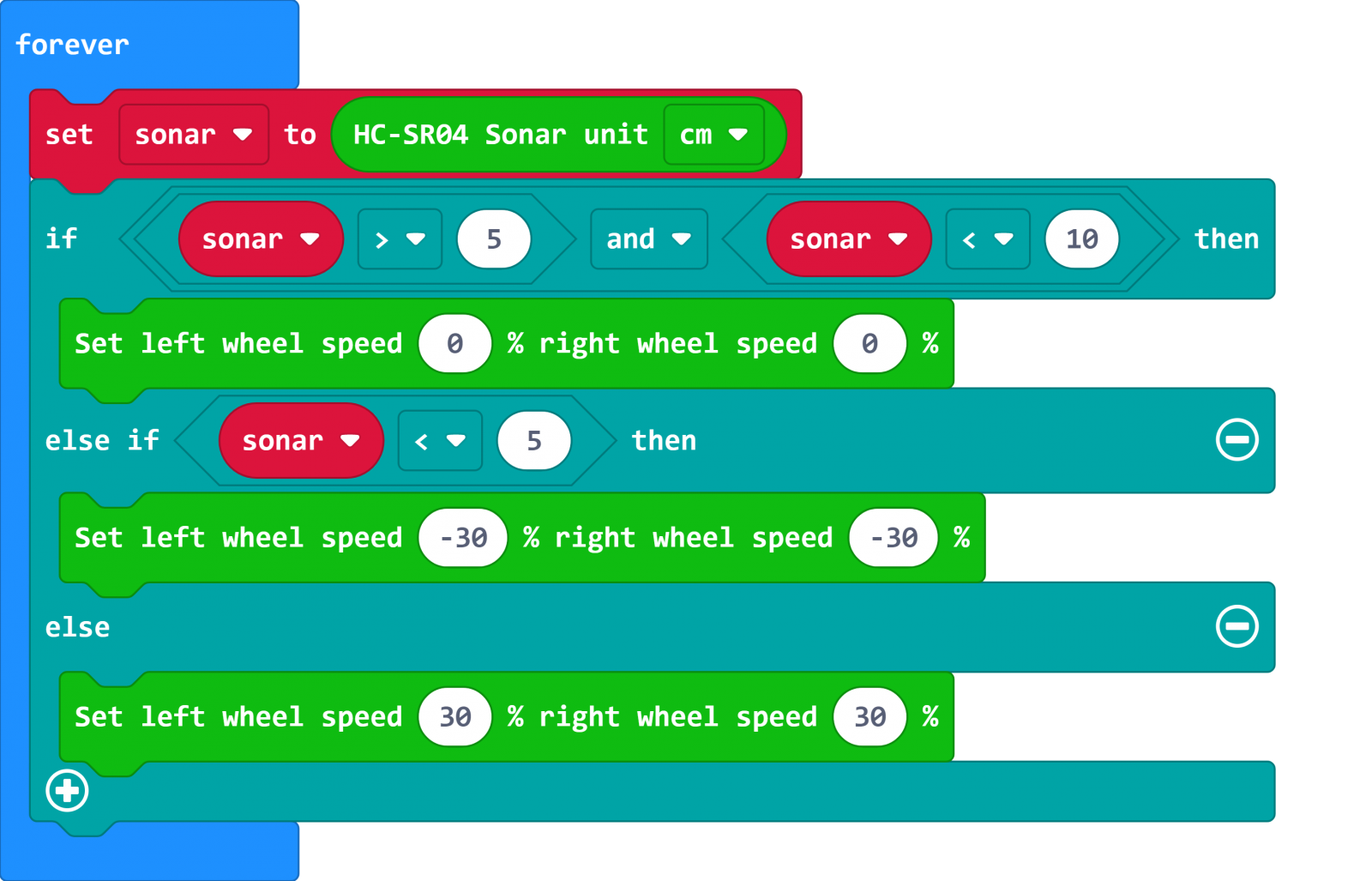
- 在forever(重複執行)積木,建立if~else(如果~否則)的判斷積木。接著建立變數:sonar,將它設定為超音波感測器偵測到的cm數值。用if來判斷偵測到的距離,如果超音波感測器(sonar)判斷到的cm數值是>5且<10之間,Q霸小車將停止前進;如果超音波感測器(sonar)判斷到的cm數值是<5,Q霸小車將倒退;否則的話(非上述兩個狀況),Q霸小車將以30%的速度前進。
結果如果我們以手來測試,當Q霸小車距離手部遙遠時,它會往前靠近;當距離夠近時,則會停止;而如果距離太近時,則會倒退。結果影片