 ELECFREAKS Wukong Manipulator Kit 機械手掌套件 ELECFREAKS WuKong Manipulator Kit 機械手掌套件 1.1. 簡介 手是我們日常生活中最重要也是最常用的部位之一,有很多藝術品都是從模擬手的想法而來的,因為它具有嫻熟的特性和良好的外觀。 悟空機械手掌套件包括一個悟空擴充板、一個手掌、5 個伺服器和一些彩色吸管。只需使用這幾個簡單的材料,再加上micro:bit主板,就可以製造出可編程仿生機
ELECFREAKS Wukong Manipulator Kit 機械手掌套件 ELECFREAKS WuKong Manipulator Kit 機械手掌套件 1.1. 簡介 手是我們日常生活中最重要也是最常用的部位之一,有很多藝術品都是從模擬手的想法而來的,因為它具有嫻熟的特性和良好的外觀。 悟空機械手掌套件包括一個悟空擴充板、一個手掌、5 個伺服器和一些彩色吸管。只需使用這幾個簡單的材料,再加上micro:bit主板,就可以製造出可編程仿生機  MICRO ROBOT吸管機器人V3-教室組合12in1 若有更新,將以此線上教案為主 仿生機構機器人簡介 模仿生物的形態、構造、運動及行為模式等。 我們將採用吸管做素材,組裝10款以非輪系的運動,應用機構來模擬生物的運動的各種形態仿生機器人;以及手動連動機構和風動力機構。 實作一、二足太空漫步 簡介 非常生動有趣的二足行走機器人,主結構是搖動滑塊曲柄機構;延伸的足部,擴展了底部面積
MICRO ROBOT吸管機器人V3-教室組合12in1 若有更新,將以此線上教案為主 仿生機構機器人簡介 模仿生物的形態、構造、運動及行為模式等。 我們將採用吸管做素材,組裝10款以非輪系的運動,應用機構來模擬生物的運動的各種形態仿生機器人;以及手動連動機構和風動力機構。 實作一、二足太空漫步 簡介 非常生動有趣的二足行走機器人,主結構是搖動滑塊曲柄機構;延伸的足部,擴展了底部面積 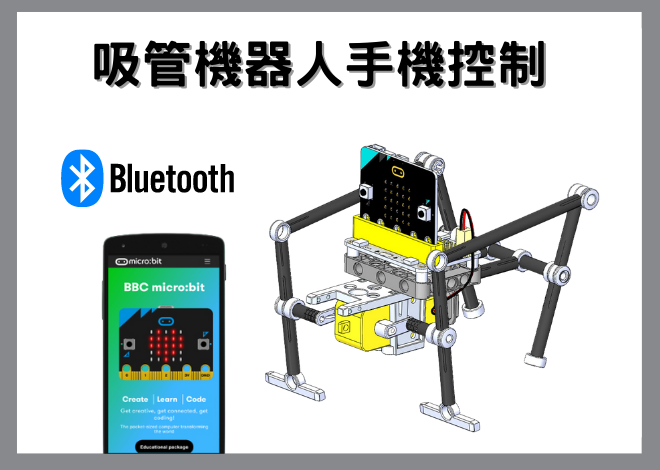 吸管機器人手機藍芽控制 手機藍芽APP控制 micro:bit教學 透過手機藍芽及micro:bit進行控制吸管仿生獸系列 因為ios系統及安卓系統)APP介面有些許不同,以下會分成Google Play ( Android ) 及 App Store ( iOS )做分享 一.進行藍芽配對 二.makecode平台編程 三.APP操作方式 一.藍芽配對 IOS系統及 A
吸管機器人手機藍芽控制 手機藍芽APP控制 micro:bit教學 透過手機藍芽及micro:bit進行控制吸管仿生獸系列 因為ios系統及安卓系統)APP介面有些許不同,以下會分成Google Play ( Android ) 及 App Store ( iOS )做分享 一.進行藍芽配對 二.makecode平台編程 三.APP操作方式 一.藍芽配對 IOS系統及 A 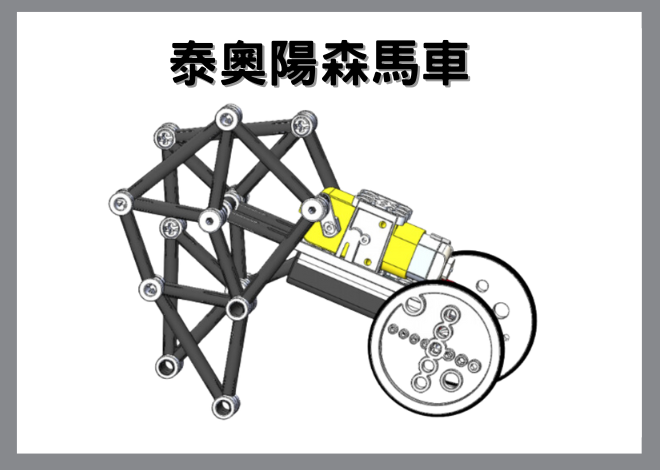 MICRO ROBOT輪系吸管機器人V3-泰奧陽森馬車 準備材料 吸管長度 組裝參考步驟
MICRO ROBOT輪系吸管機器人V3-泰奧陽森馬車 準備材料 吸管長度 組裝參考步驟  MICRO ROBOT輪系吸管機器人V3-人力車 準備材料 吸管長度 組裝參考步驟 組裝完成!
MICRO ROBOT輪系吸管機器人V3-人力車 準備材料 吸管長度 組裝參考步驟 組裝完成!  MICRO ROBOT輪系吸管機器人V3-推輪椅 準備材料 吸管長度 組裝參考步驟 組裝完成!
MICRO ROBOT輪系吸管機器人V3-推輪椅 準備材料 吸管長度 組裝參考步驟 組裝完成!  MICRO ROBOT輪系吸管機器人V3-騎單車 準備材料 吸管長度 組裝參考步驟 組裝完成!
MICRO ROBOT輪系吸管機器人V3-騎單車 準備材料 吸管長度 組裝參考步驟 組裝完成!  MICRO ROBOT輪系吸管機器人V3-單車 材料準備 吸管長度 組裝參考步驟 組裝完成!
MICRO ROBOT輪系吸管機器人V3-單車 材料準備 吸管長度 組裝參考步驟 組裝完成! 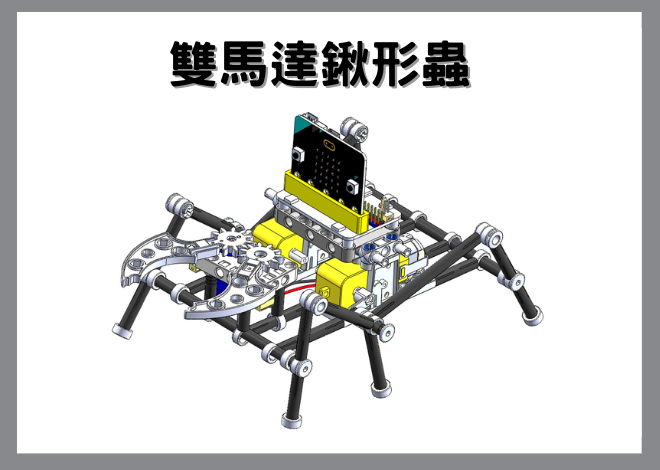 MICRO ROBOT吸管機器人V3-雙馬達鍬形蟲 簡介 本模型是以雙馬達六足行走機器人為基礎,增加夾爪功能模組,充分發揮Micro:bit與擴展板功能,可以前進、後退與左右轉彎,夾持動作等應用。 吸管機器人材料準備 吸管長度 新款吸管機器人特色 組裝參考步驟
MICRO ROBOT吸管機器人V3-雙馬達鍬形蟲 簡介 本模型是以雙馬達六足行走機器人為基礎,增加夾爪功能模組,充分發揮Micro:bit與擴展板功能,可以前進、後退與左右轉彎,夾持動作等應用。 吸管機器人材料準備 吸管長度 新款吸管機器人特色 組裝參考步驟 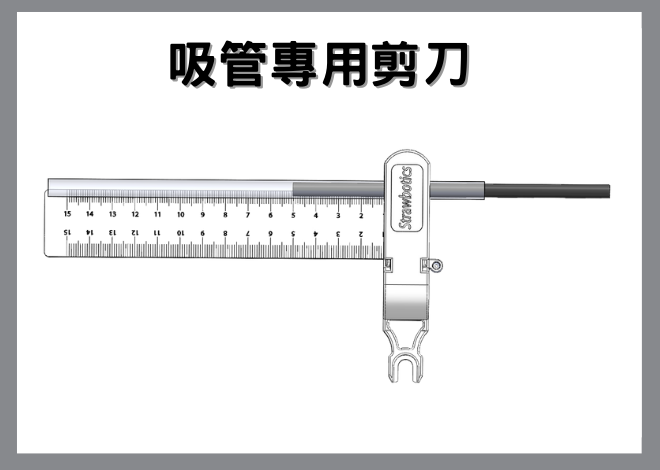 MICRO ROBOT吸管機器人V3-吸管專用剪刀含透明導管 MICRO ROBOT 吸管機器人專用剪刀(含透明導管) 簡介 吸管剪刀整合尺規與剪刀,將刀刃內藏,年幼使用者更方便安全,尺規與裁剪方向可以依慣用手改變組裝。吸管剪刀後方的魚尾叉部位,是拆卸吸管扣件類的快速工具。 ※吸管剪刀經過按壓10,000次疲勞實驗,經久耐用! 材料組 吸管剪刀 x1 透明吸管 x1 直尺 x1 斜楔 x1
MICRO ROBOT吸管機器人V3-吸管專用剪刀含透明導管 MICRO ROBOT 吸管機器人專用剪刀(含透明導管) 簡介 吸管剪刀整合尺規與剪刀,將刀刃內藏,年幼使用者更方便安全,尺規與裁剪方向可以依慣用手改變組裝。吸管剪刀後方的魚尾叉部位,是拆卸吸管扣件類的快速工具。 ※吸管剪刀經過按壓10,000次疲勞實驗,經久耐用! 材料組 吸管剪刀 x1 透明吸管 x1 直尺 x1 斜楔 x1  MICRO ROBOT吸管機器人V3-戰鬥蝸牛 簡介 以曲柄延伸的3叉接頭劃動地面來前進,底部整個貼住地面,摩擦力較大,緩步向前推進。 吸管機器人材料準備(不含V2主板及悟空版) 加購Micro:bit 及悟空版 吸管長度 新款吸管機器人特色 組裝參考步驟
MICRO ROBOT吸管機器人V3-戰鬥蝸牛 簡介 以曲柄延伸的3叉接頭劃動地面來前進,底部整個貼住地面,摩擦力較大,緩步向前推進。 吸管機器人材料準備(不含V2主板及悟空版) 加購Micro:bit 及悟空版 吸管長度 新款吸管機器人特色 組裝參考步驟  MICRO ROBOT吸管機器人V3-四足X型交叉連桿 簡介 機器人前後腳之間,以交叉的連桿相連結,這種X型交叉連桿機構的四足行走機器人行走的平穩度,較L型連桿為高。 吸管機器人材料準備(不含悟空版及V2主板) 加購Micro:bit 及悟空版 吸管長度 新款吸管機器人特色 組裝參考步驟
MICRO ROBOT吸管機器人V3-四足X型交叉連桿 簡介 機器人前後腳之間,以交叉的連桿相連結,這種X型交叉連桿機構的四足行走機器人行走的平穩度,較L型連桿為高。 吸管機器人材料準備(不含悟空版及V2主板) 加購Micro:bit 及悟空版 吸管長度 新款吸管機器人特色 組裝參考步驟  |  |  |  |  |