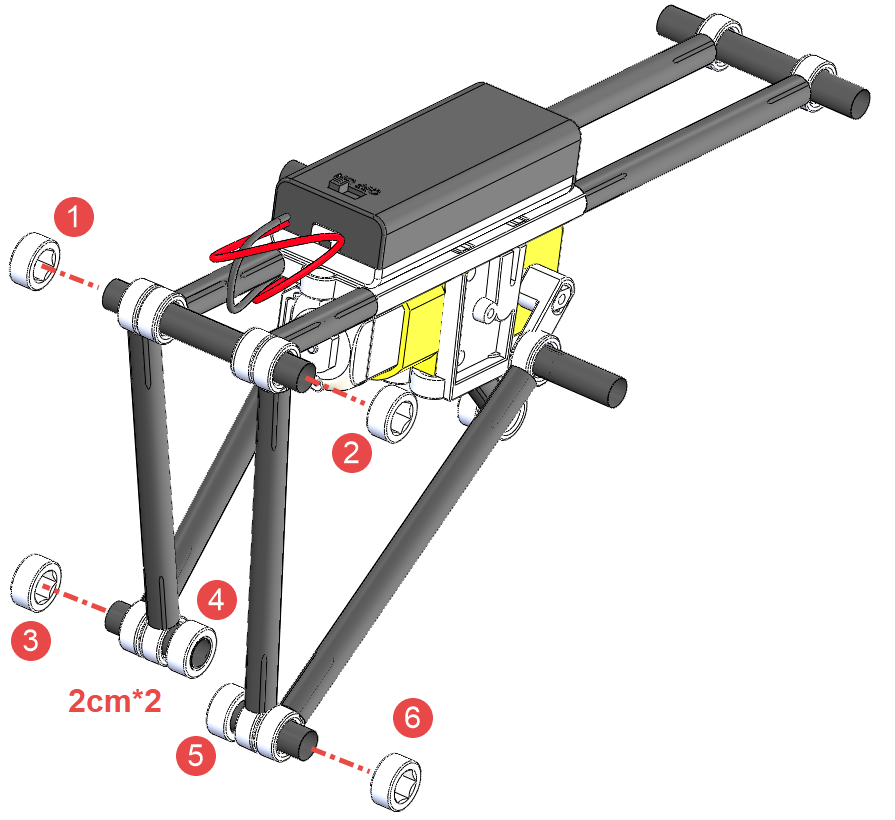
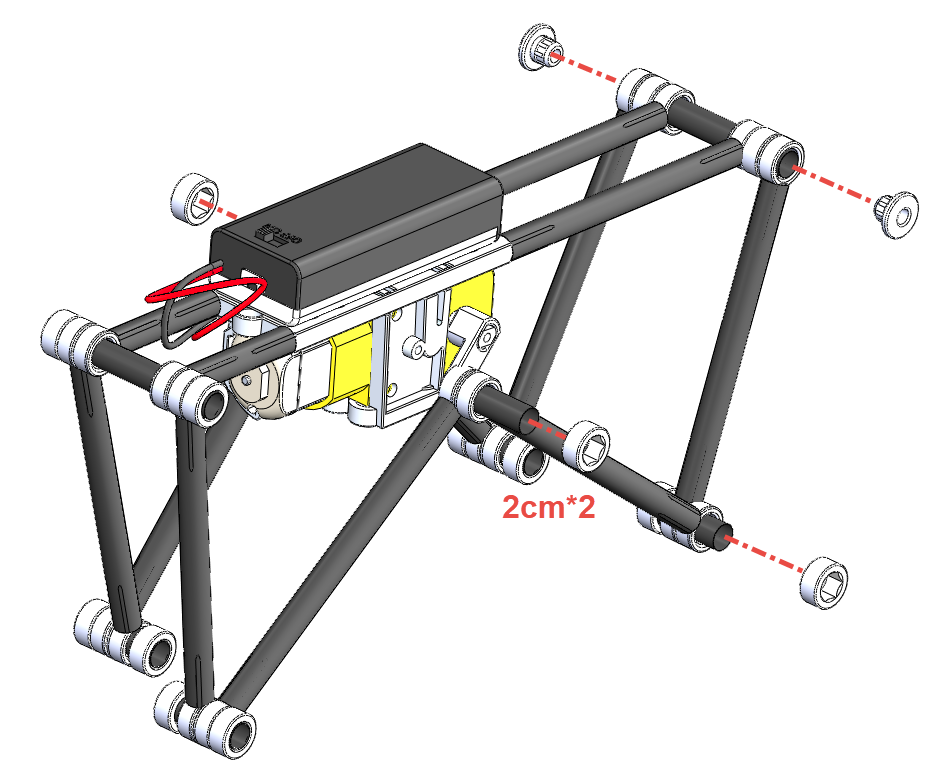
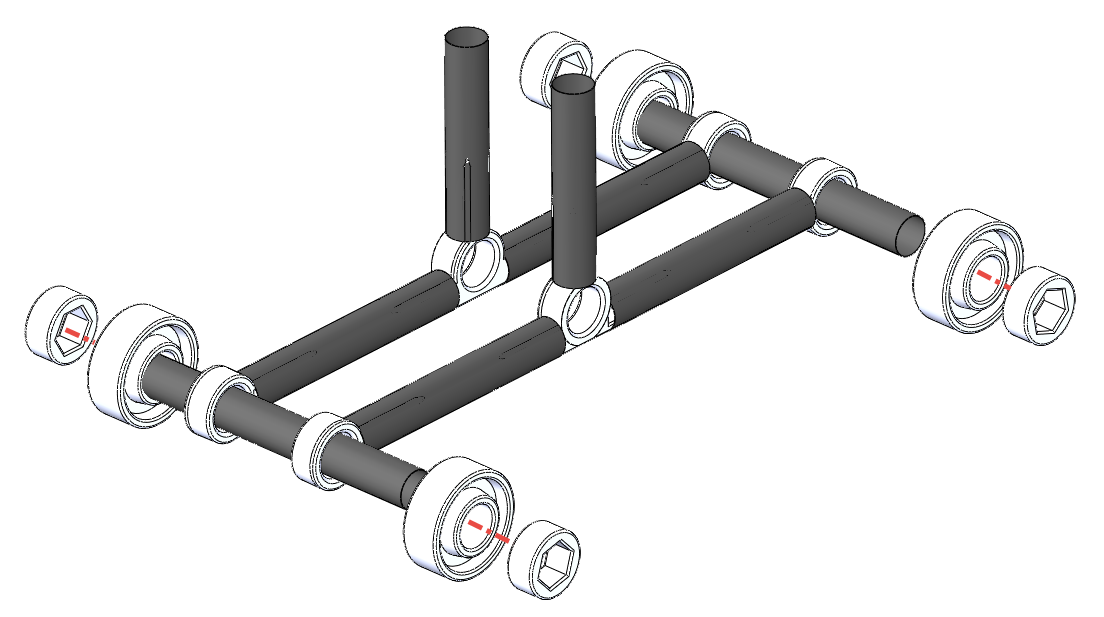
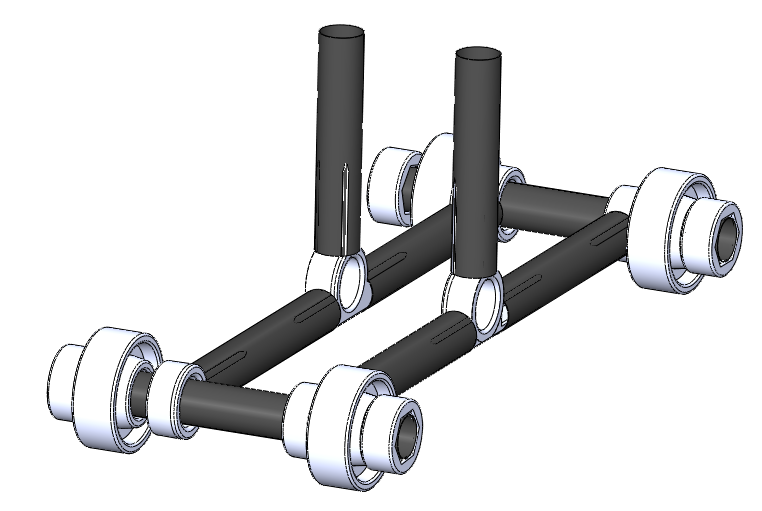
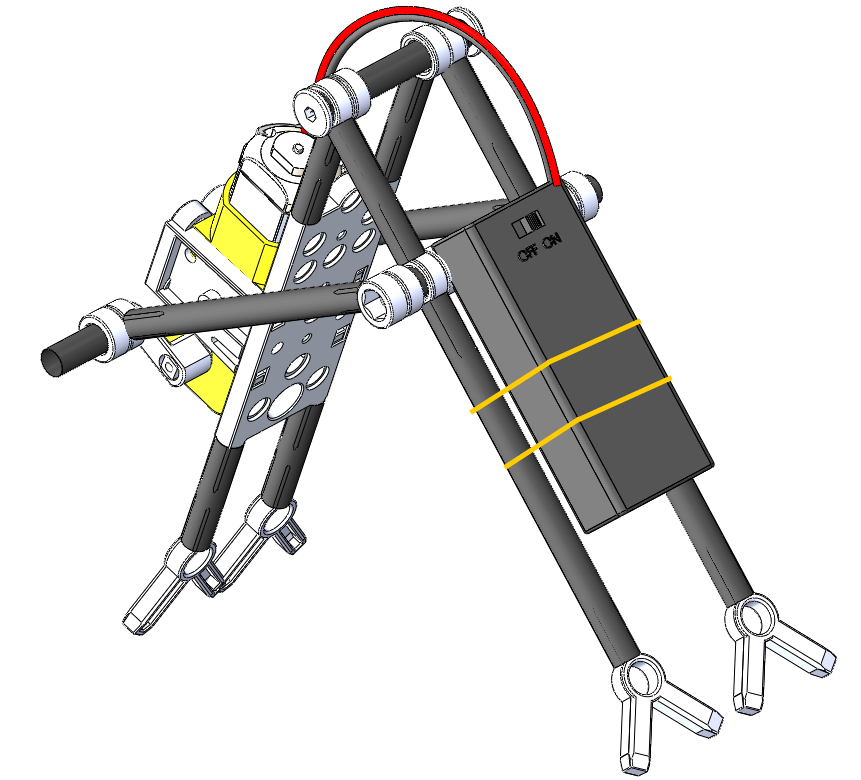
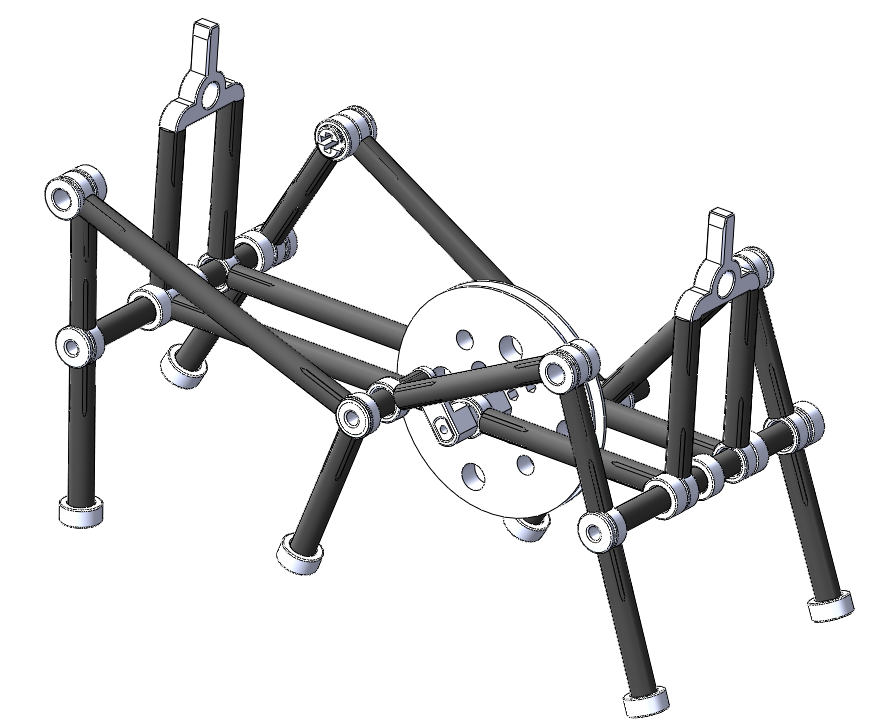
實作三、四足行走機器人-X形交叉連桿簡介機器人前後腳之間,以交叉的連桿相連結,這種X型交叉連桿機構的四足行走機器人行走的平穩度,較L型連桿為高。
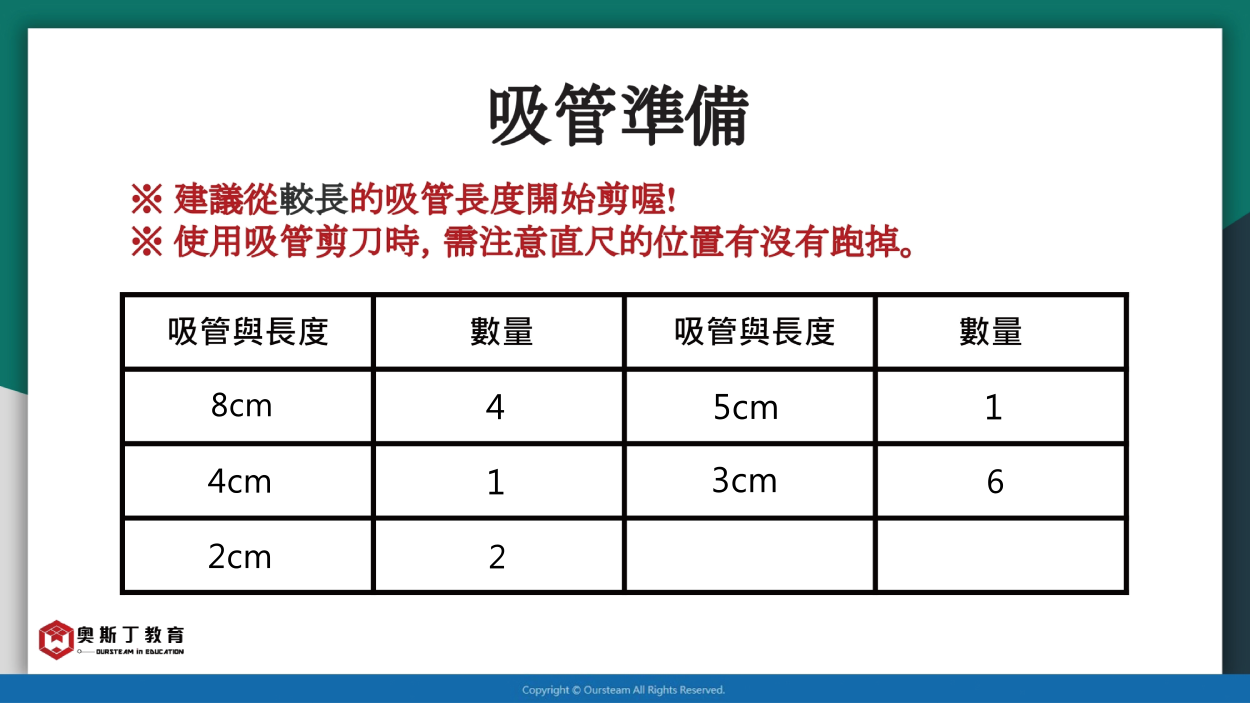
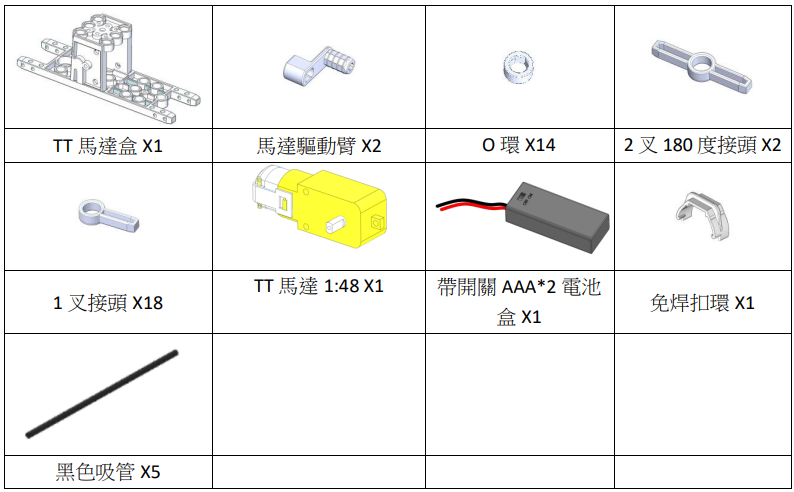
吸管機器人材料準備(不含悟空版及V2主板) 吸管長度組裝參考步驟電池版本行走影片
實作四、四足行走機器人-W形連桿簡介此連桿機構從側面觀察,如字母W形,單側的二足連接到曲柄,走起路來有滑動的感覺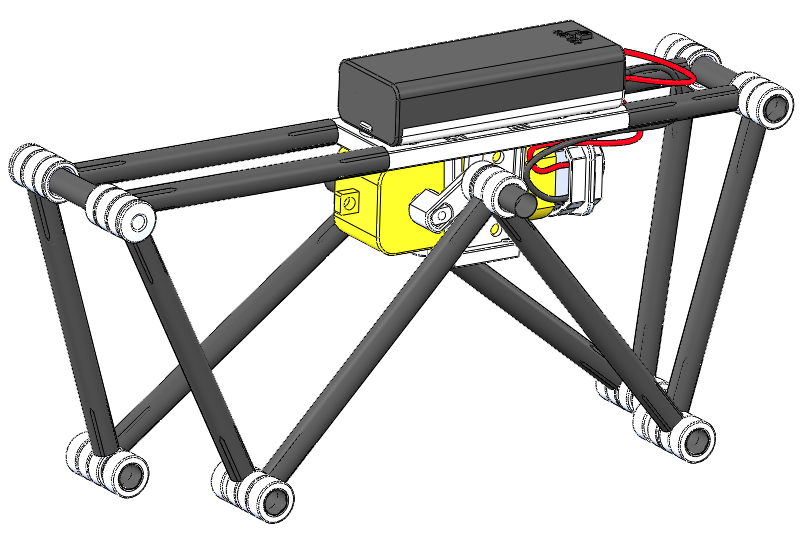
吸管機器人準備材料(不含V2主板及悟空板)
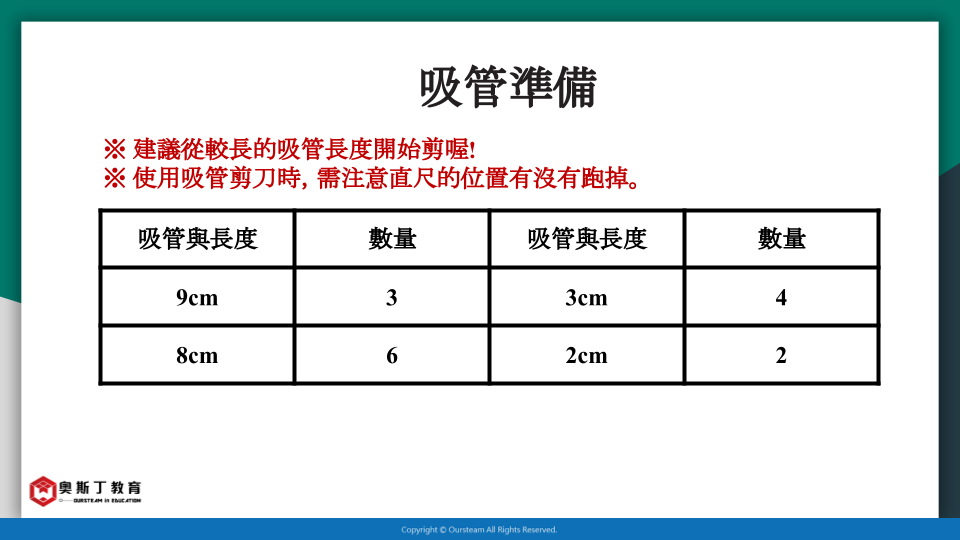
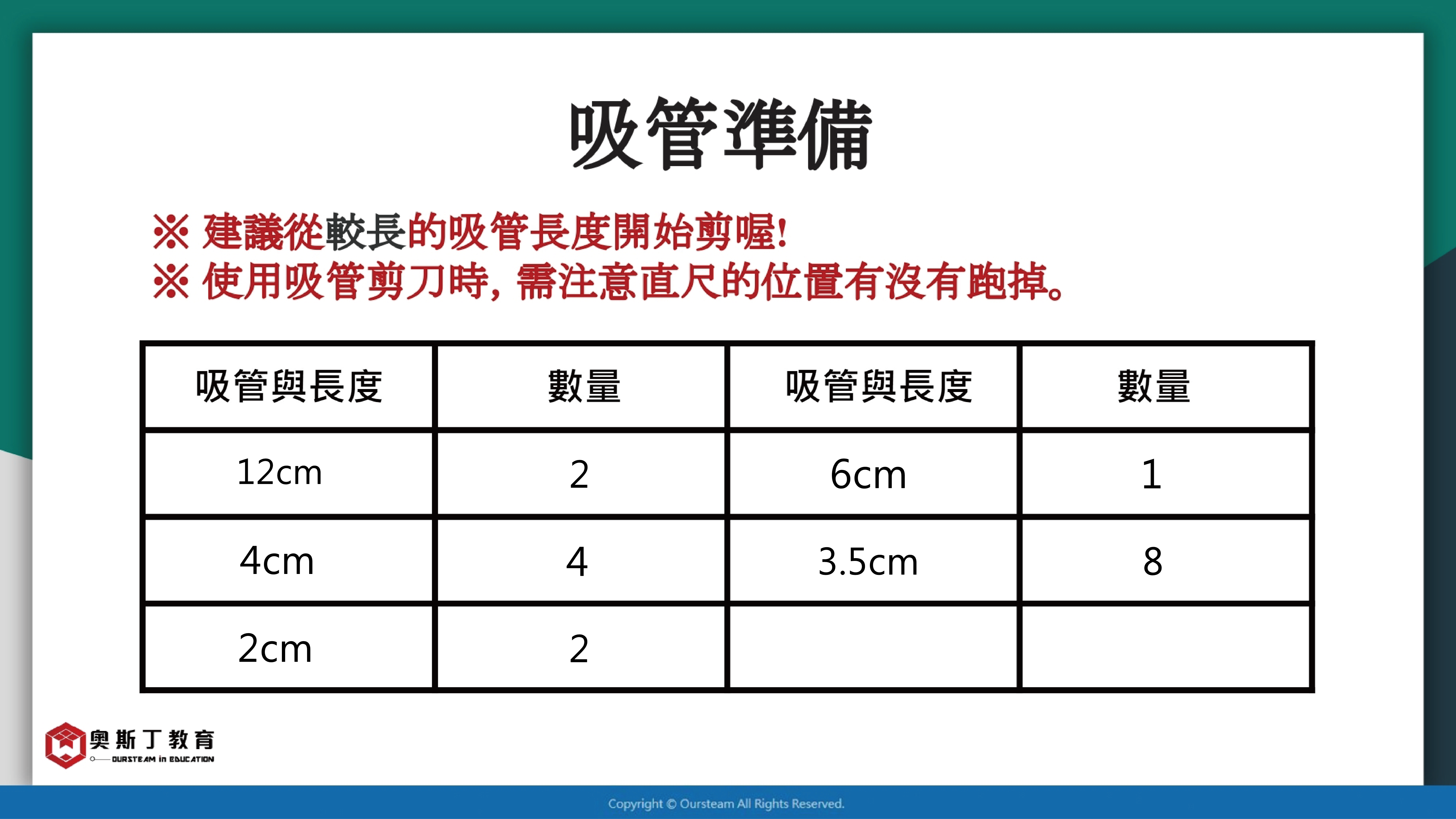
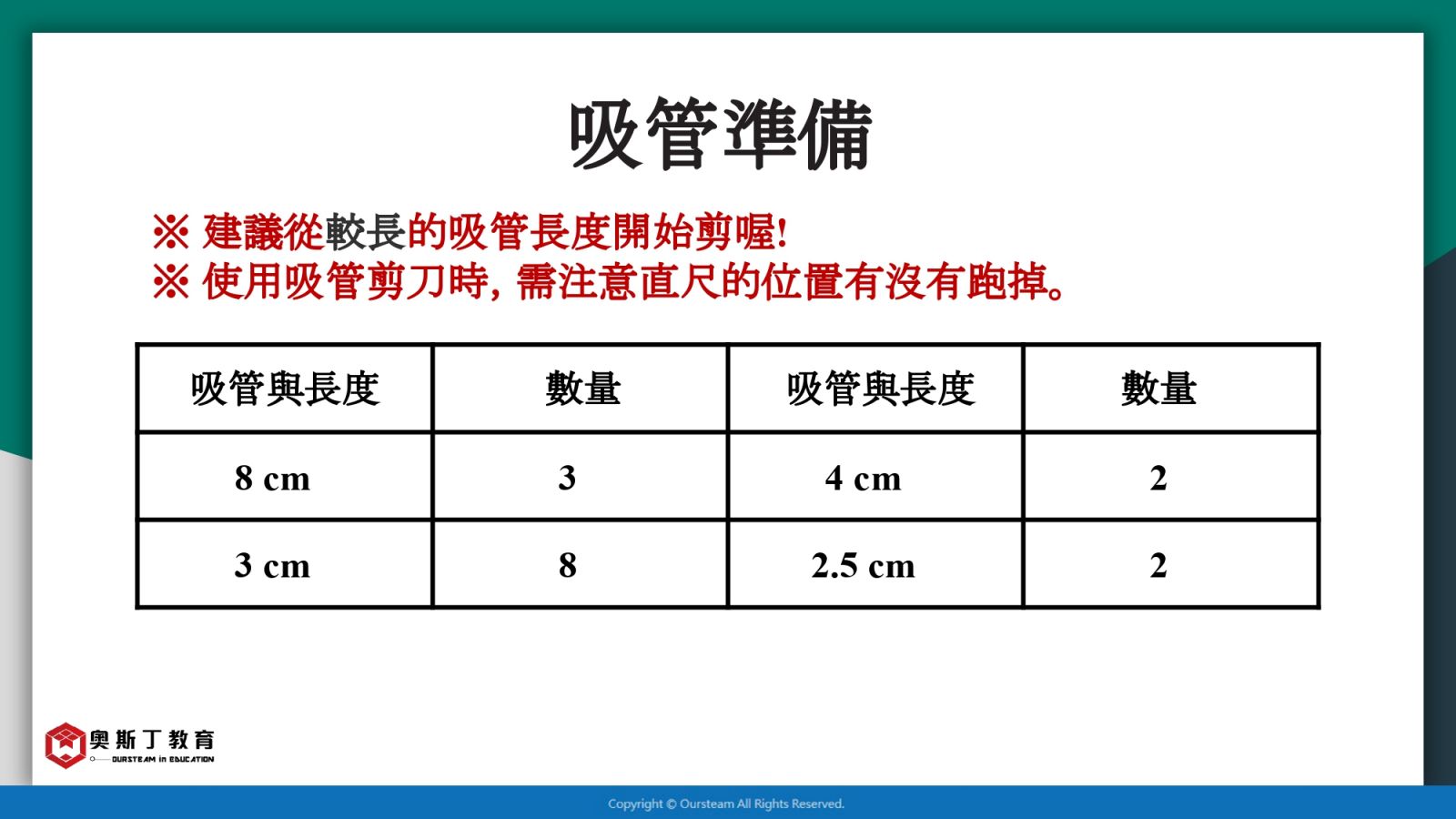
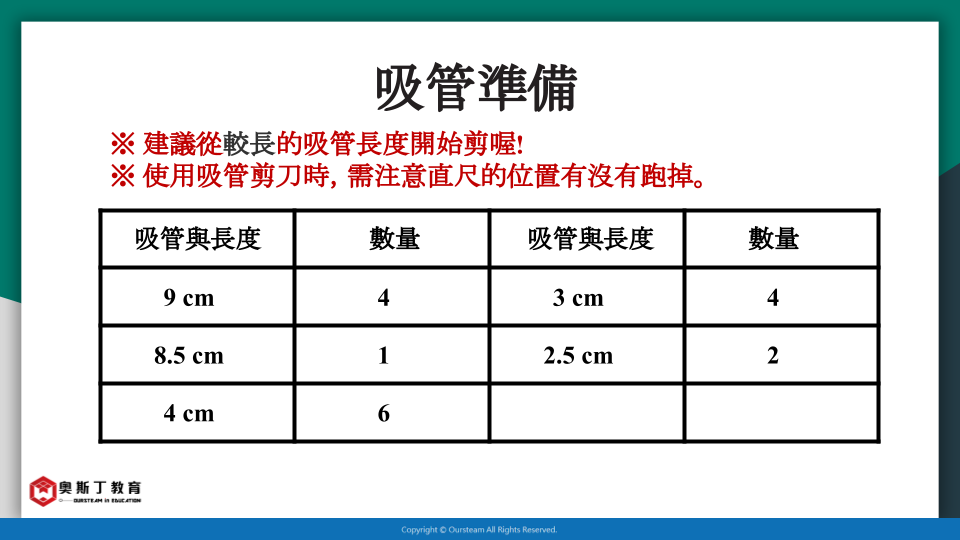
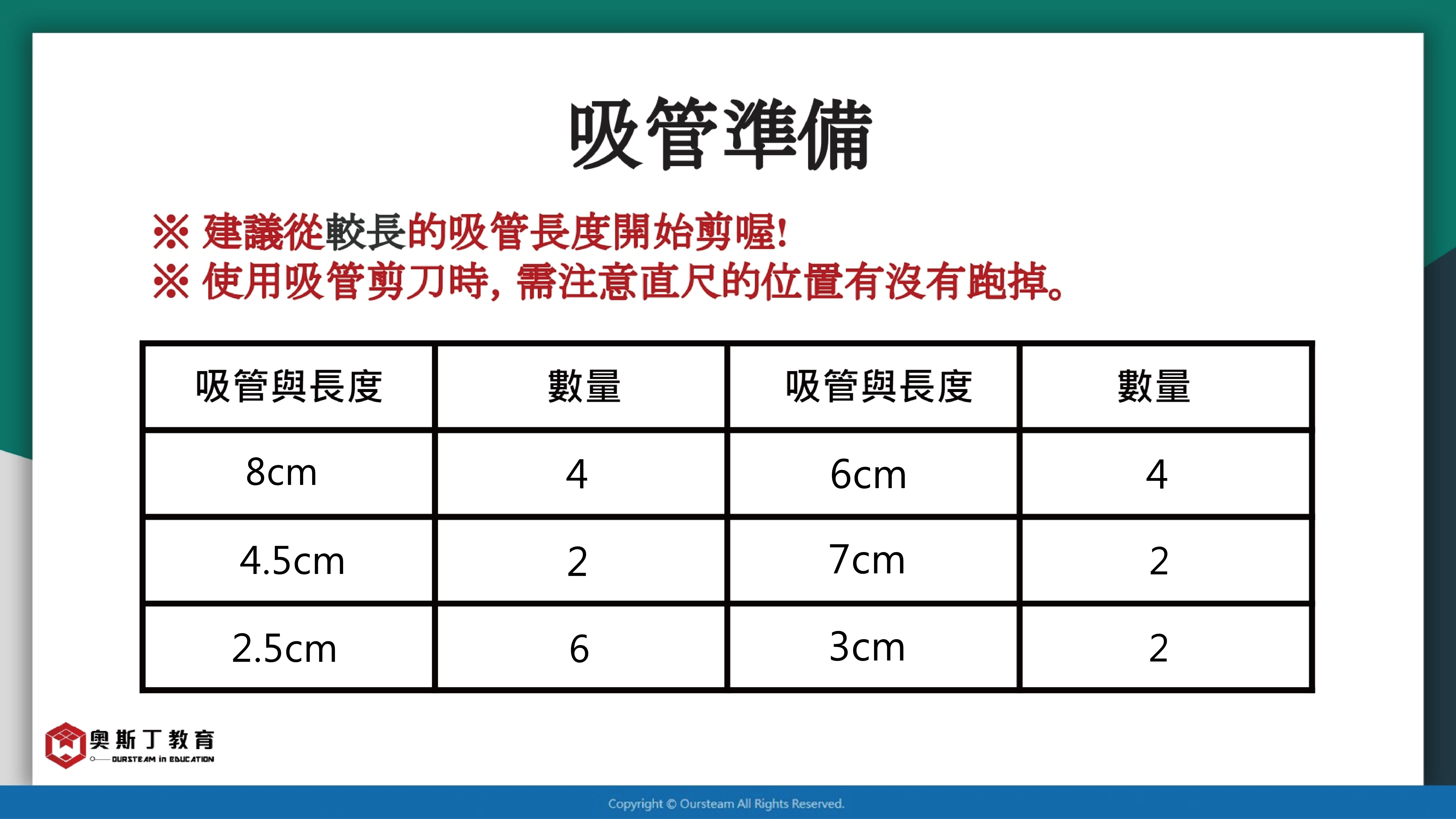
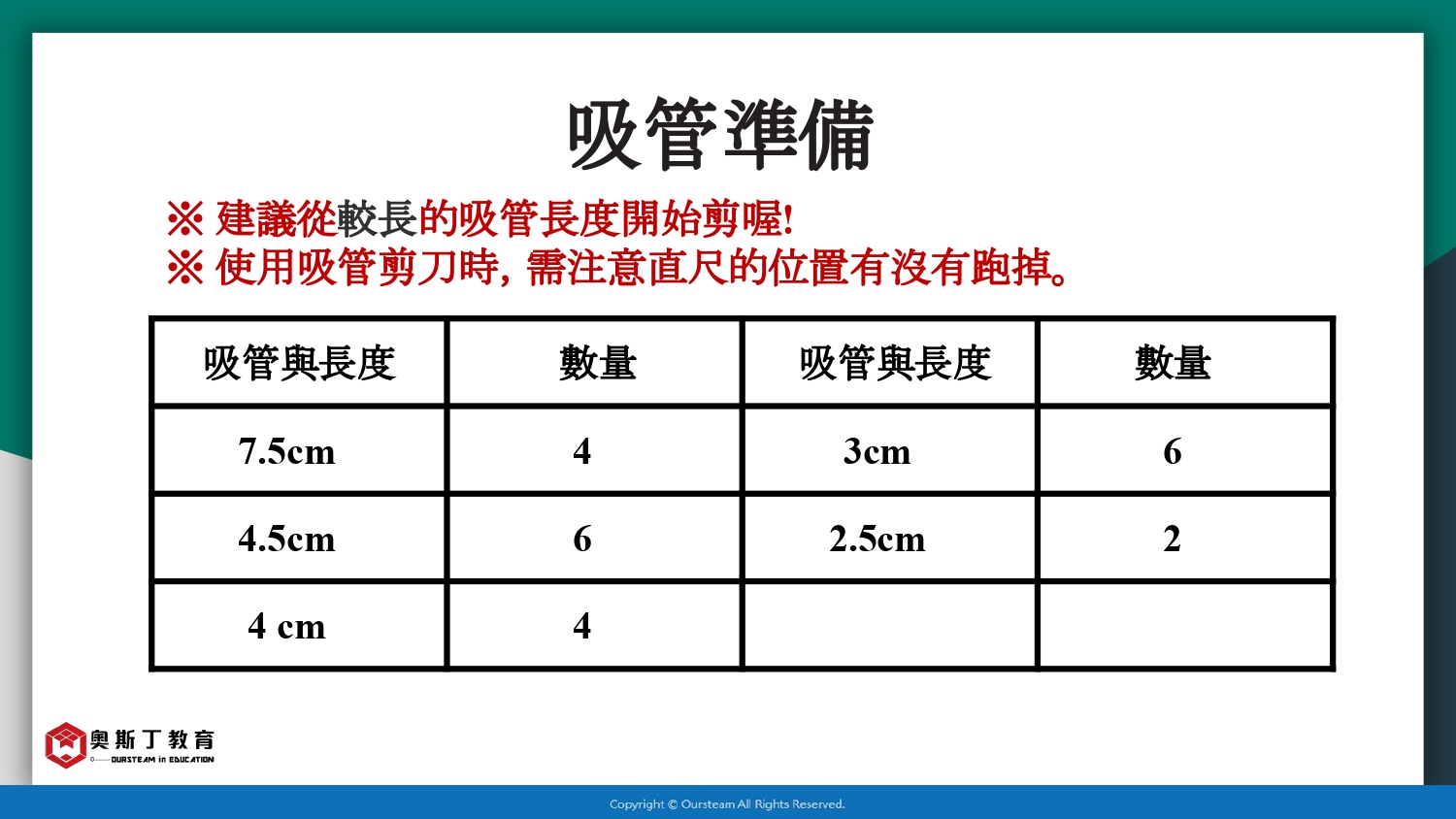
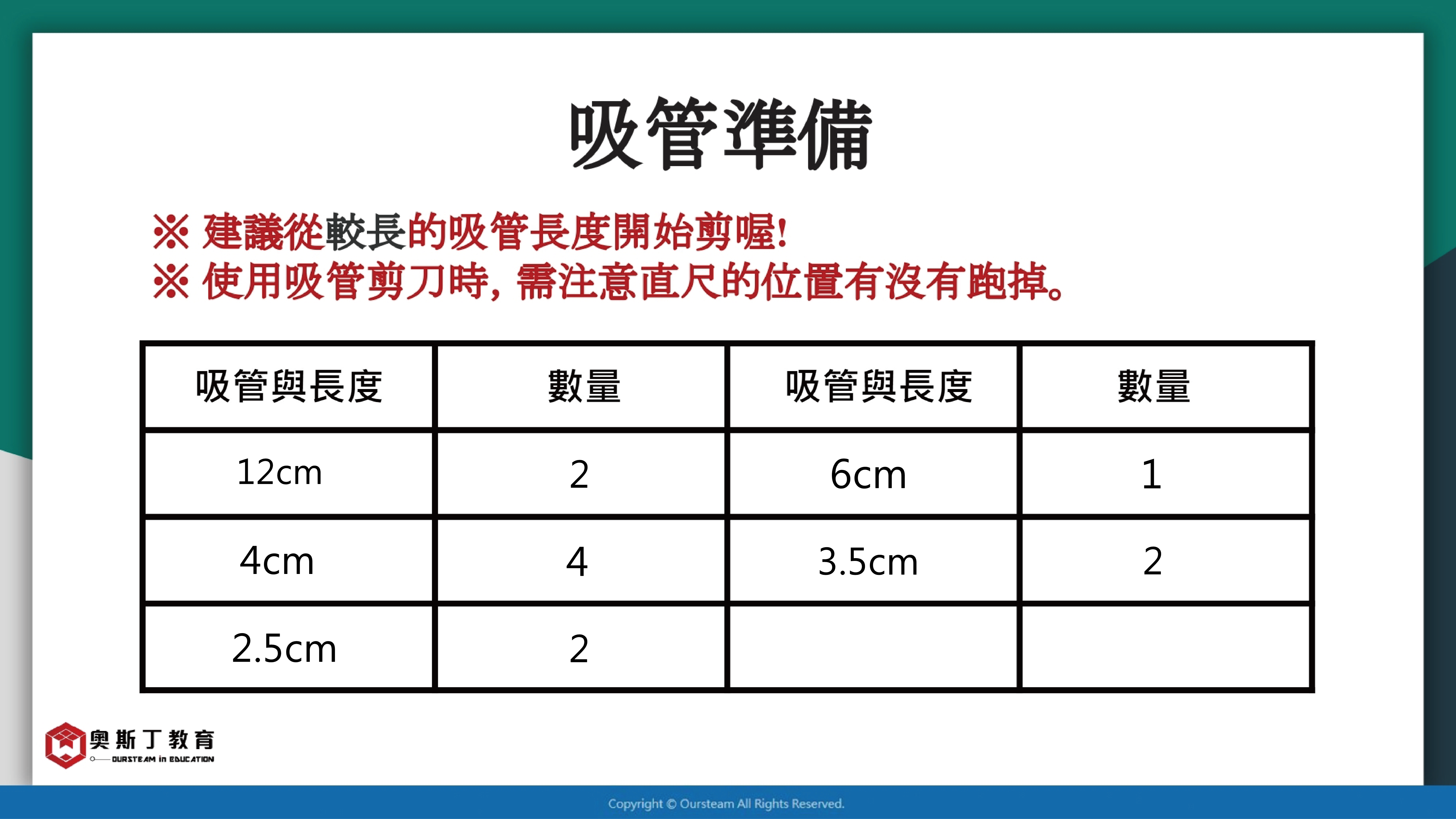
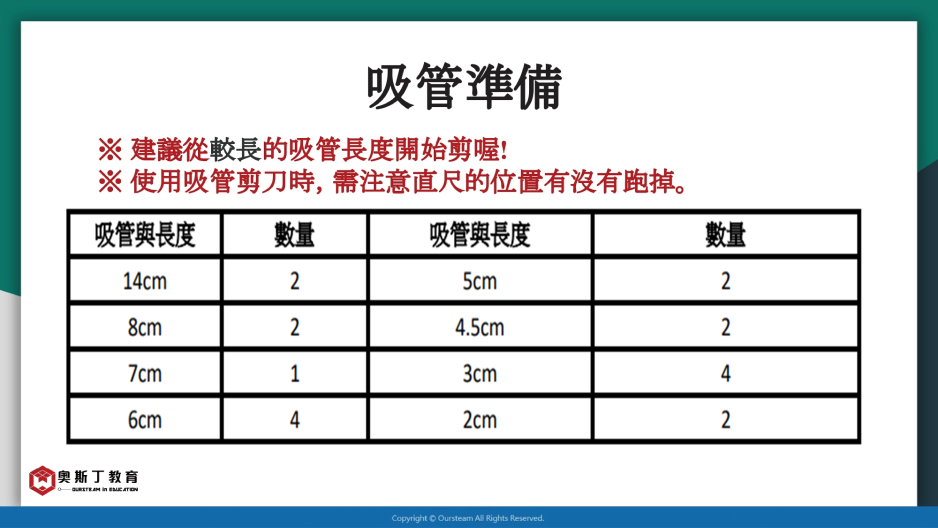
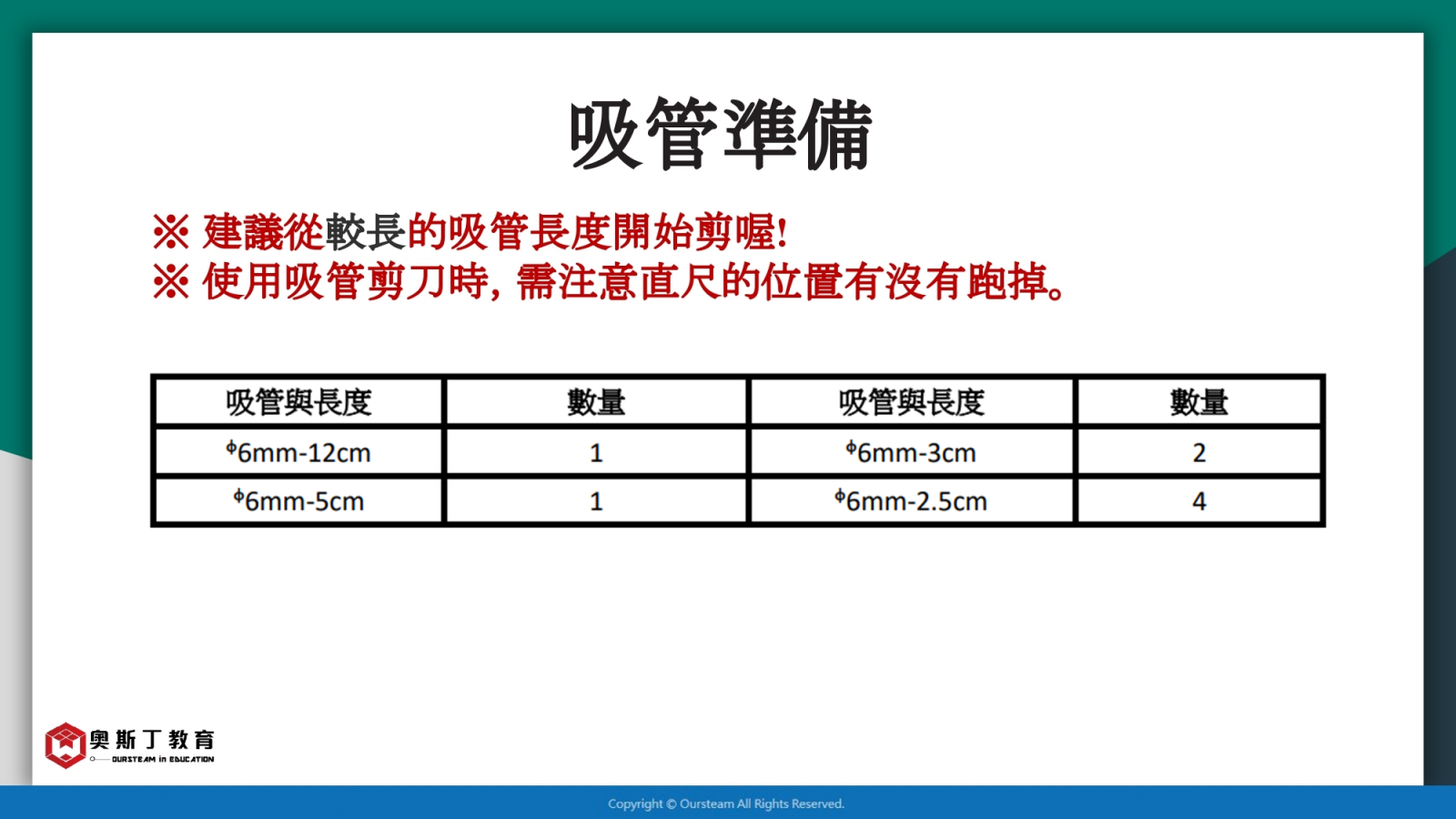
吸管與長度
組裝參考步驟
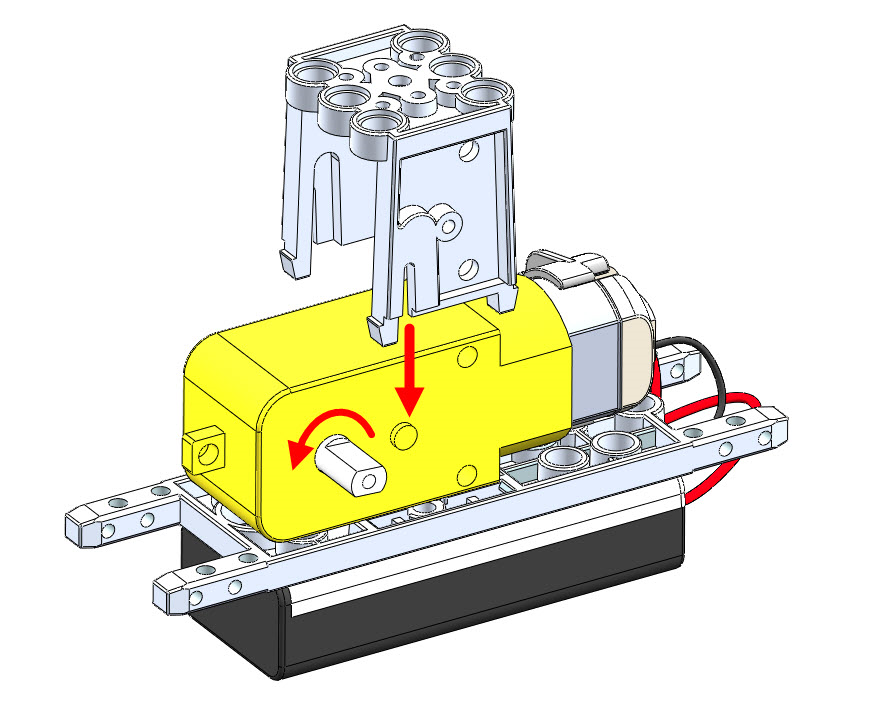
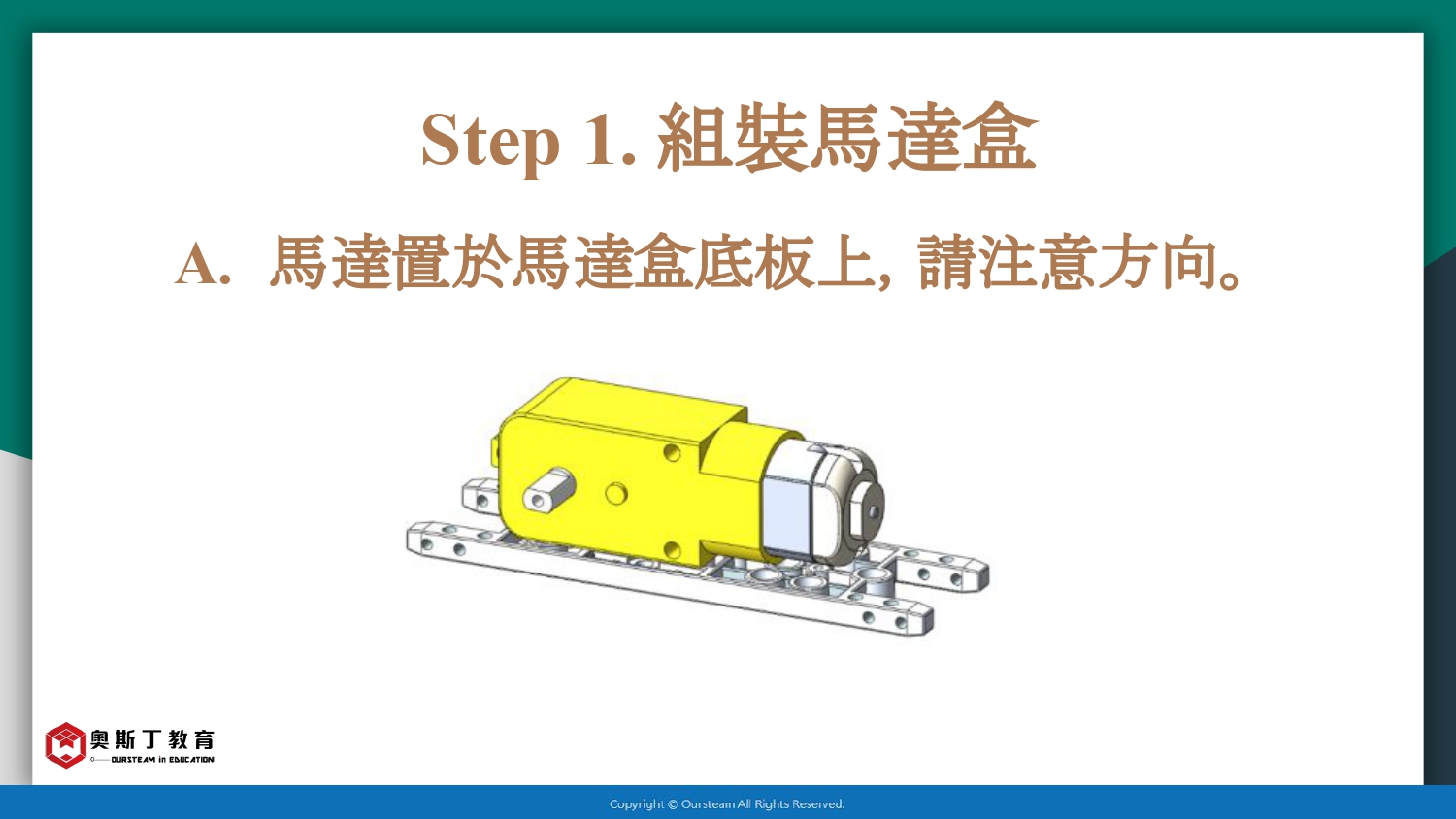
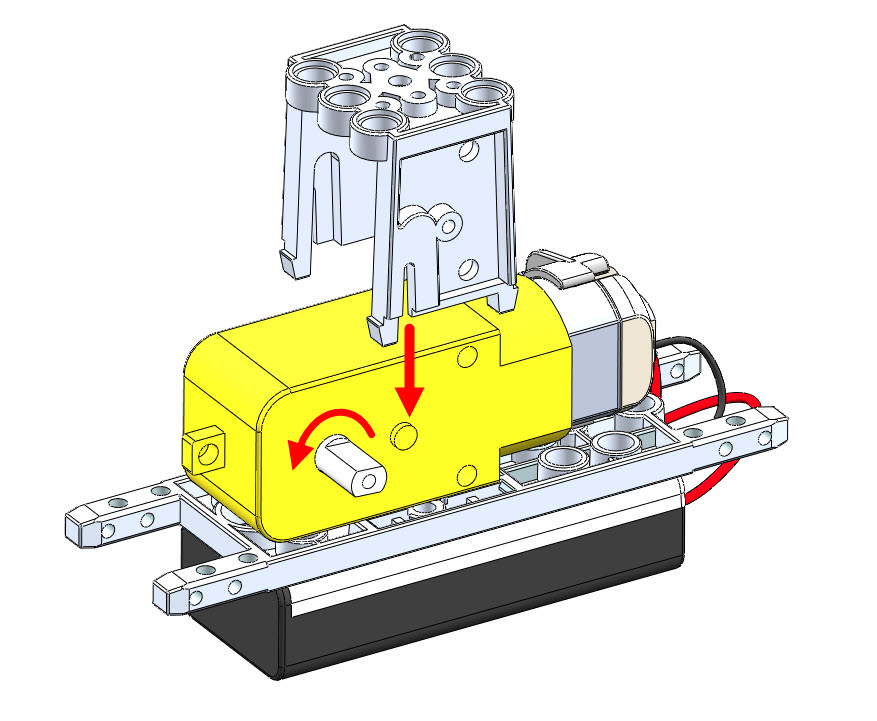
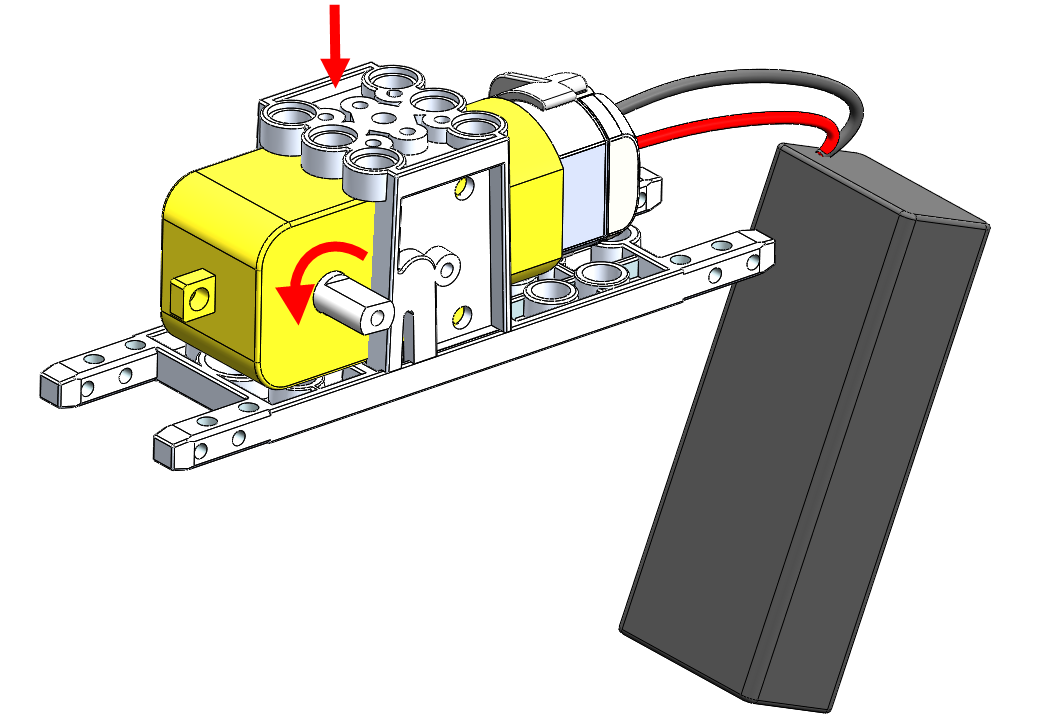
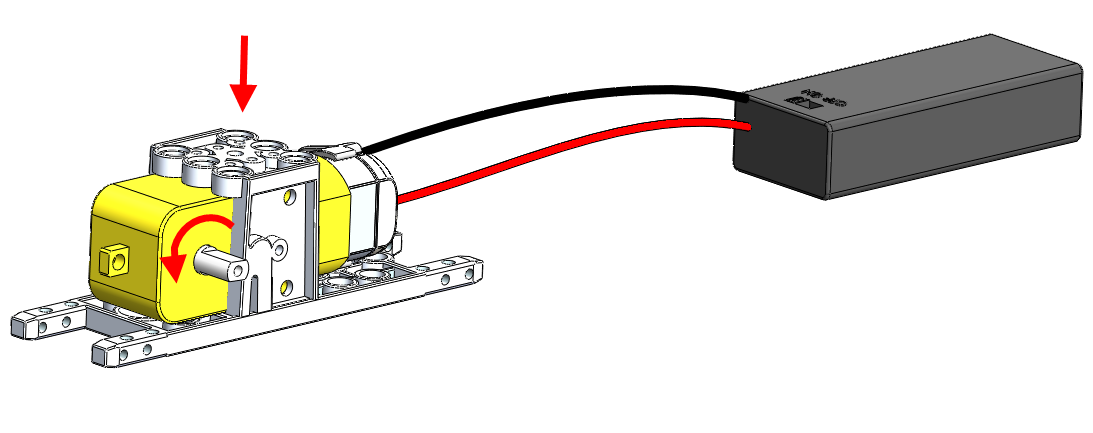
Step 1.
- 電池盒更換上蓋,裝入AAA*2電池
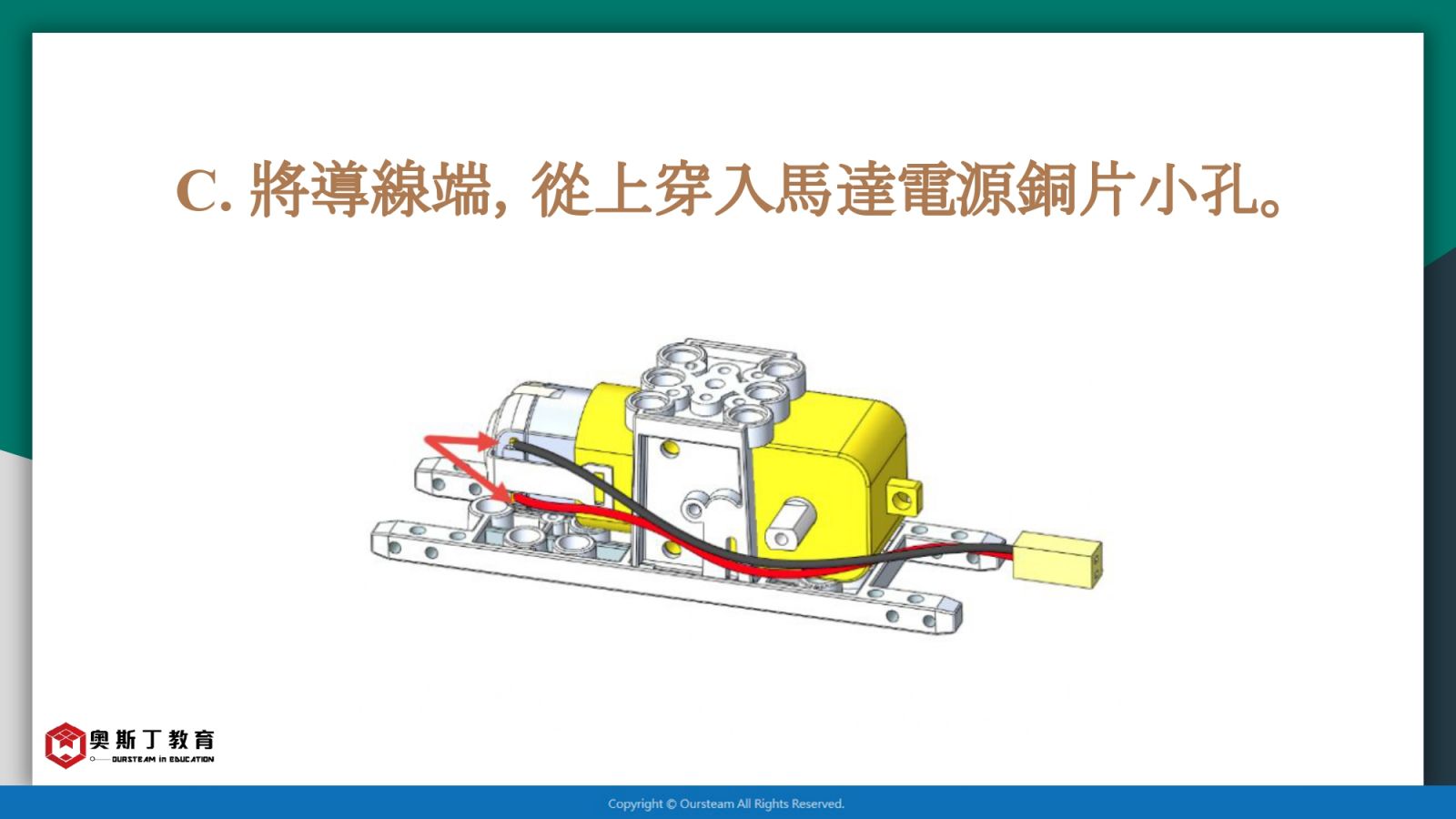
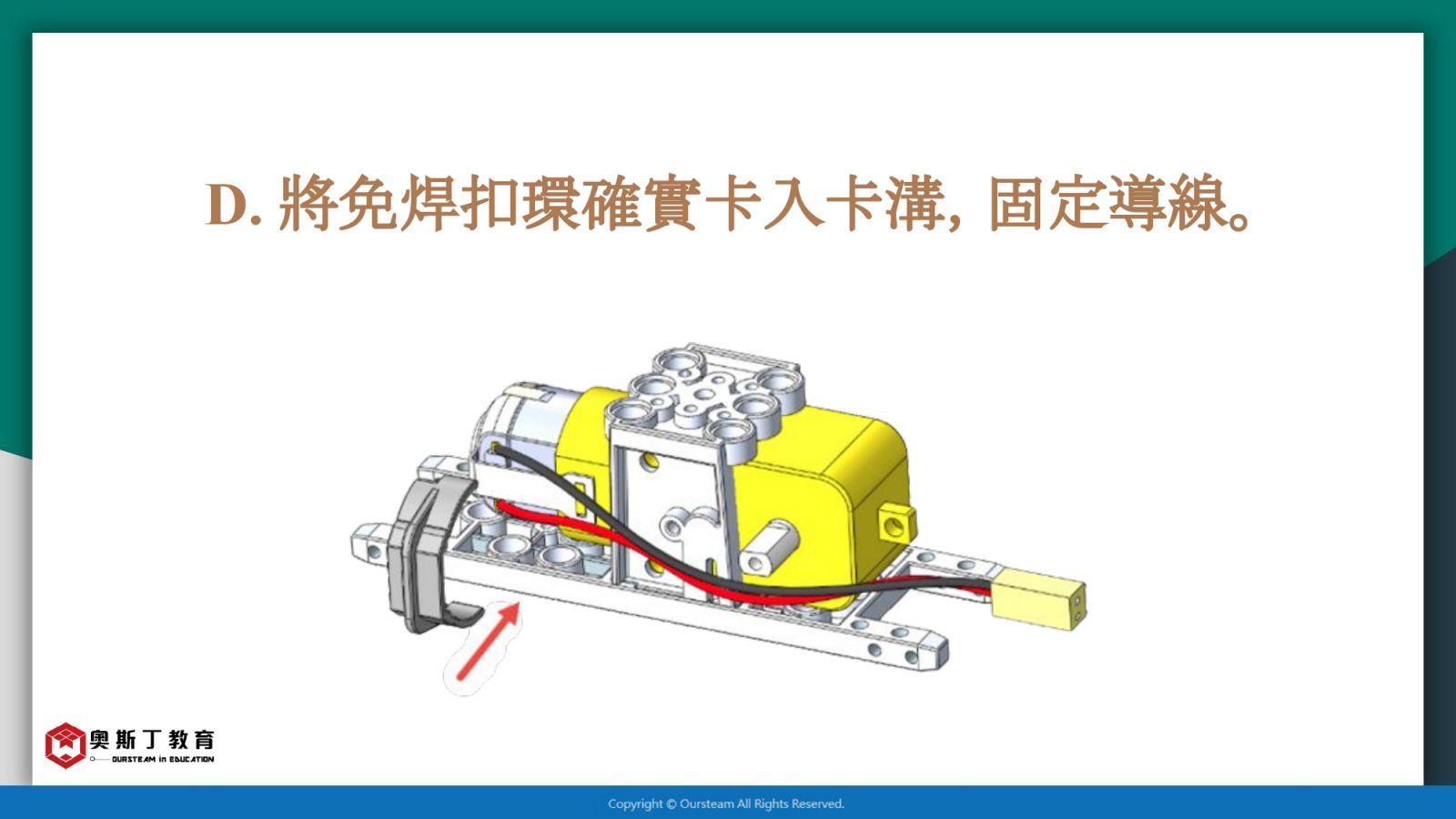
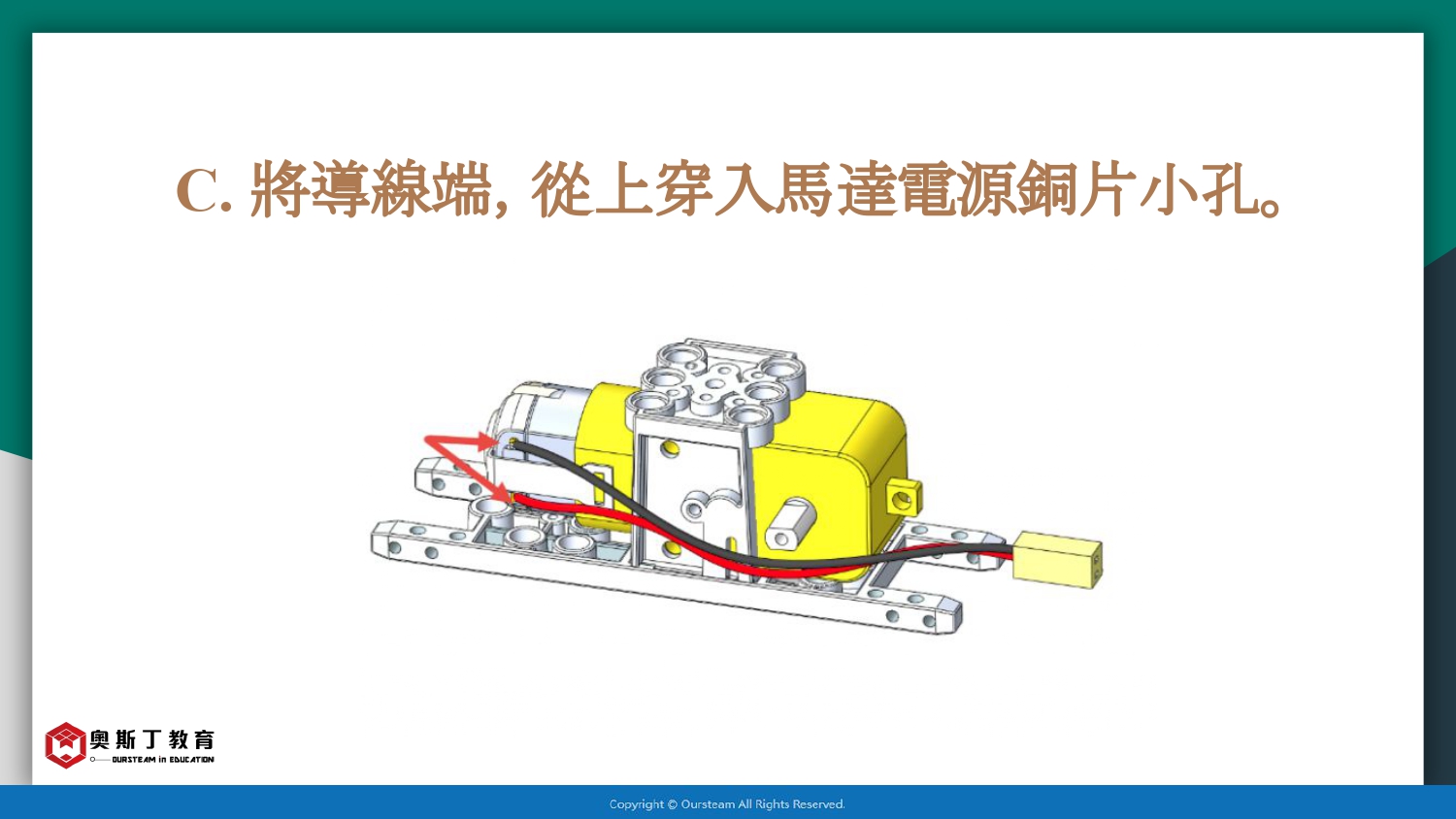
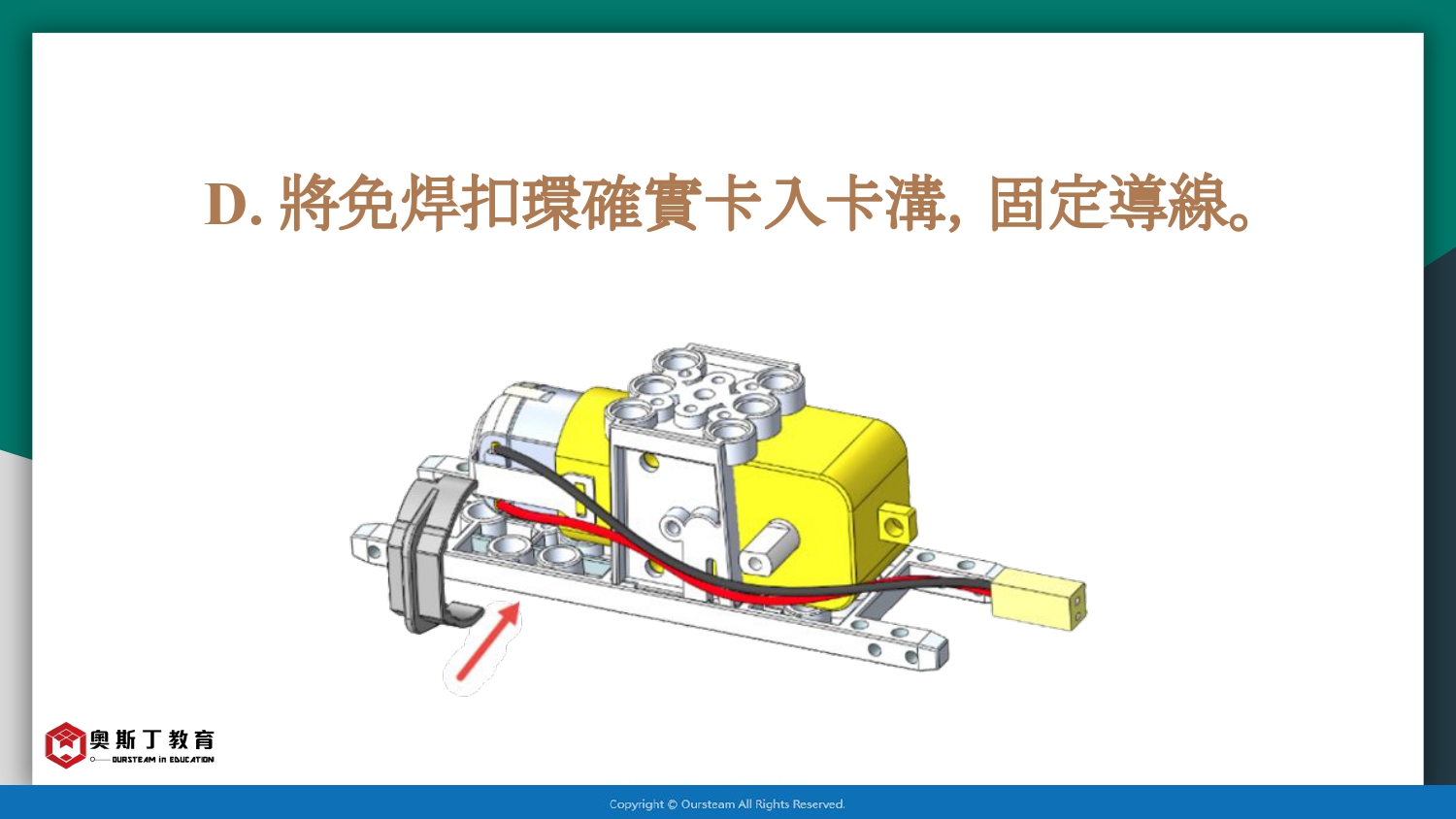
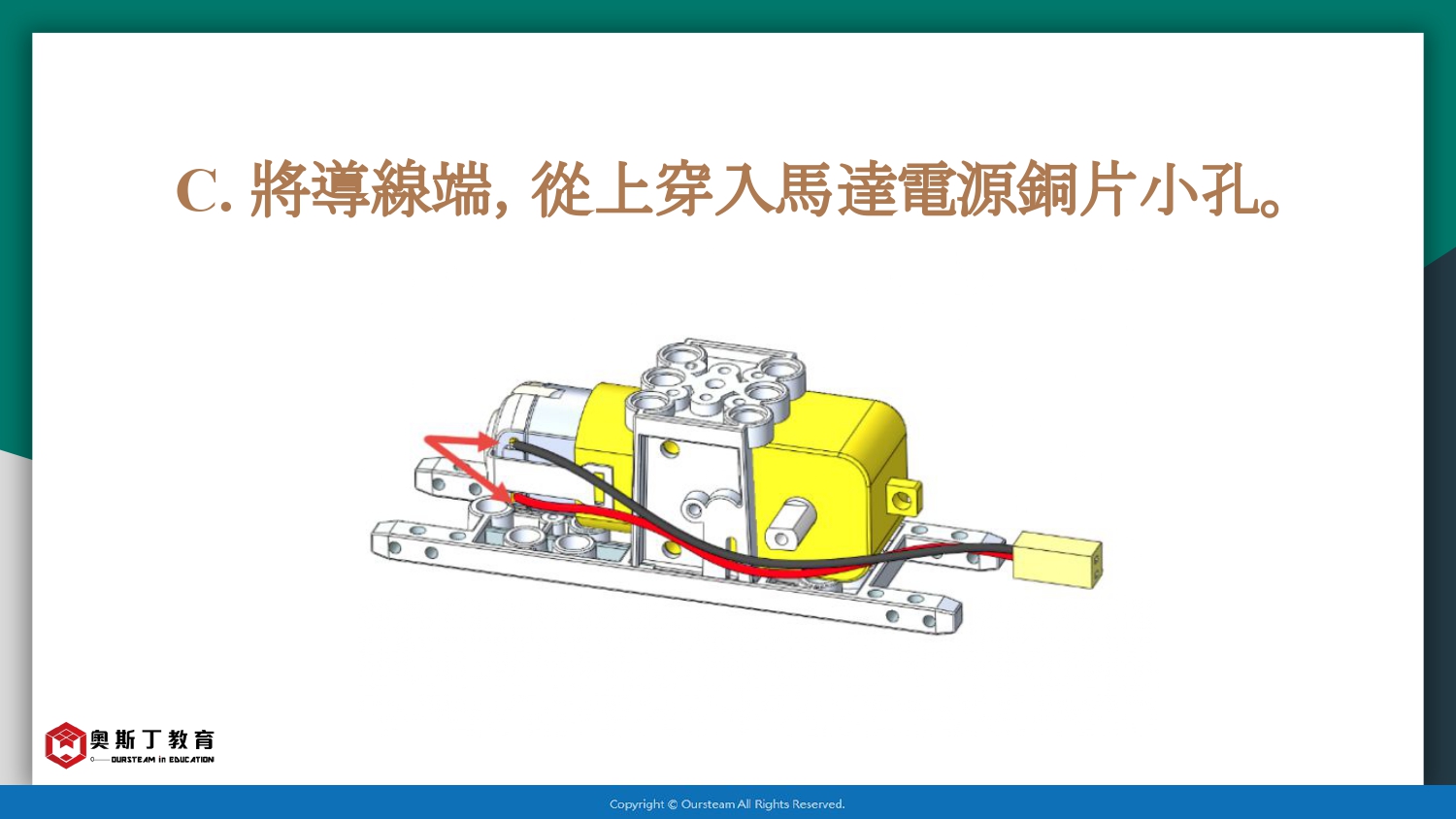
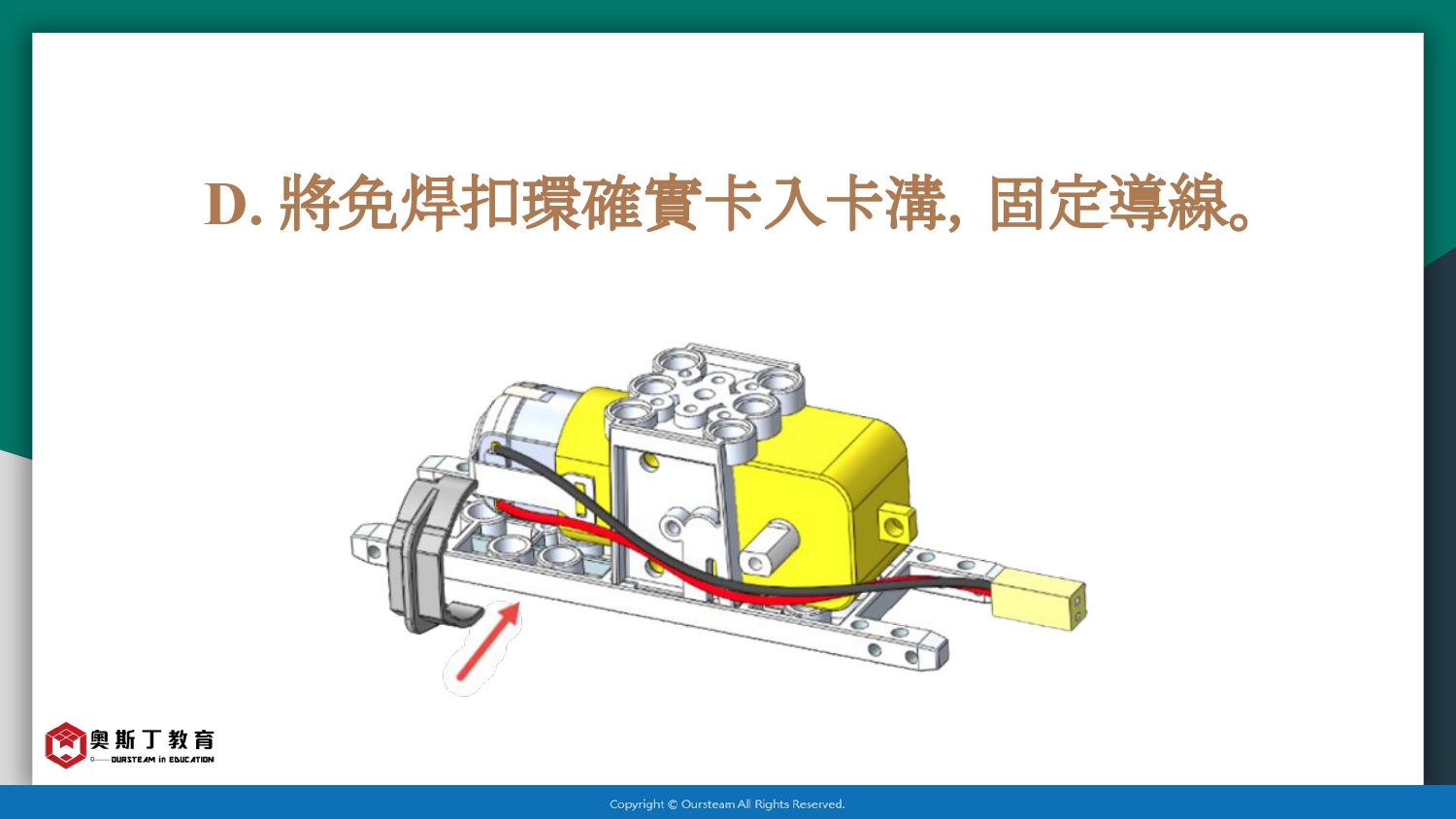
- 免焊扣環連結電池盒與馬達
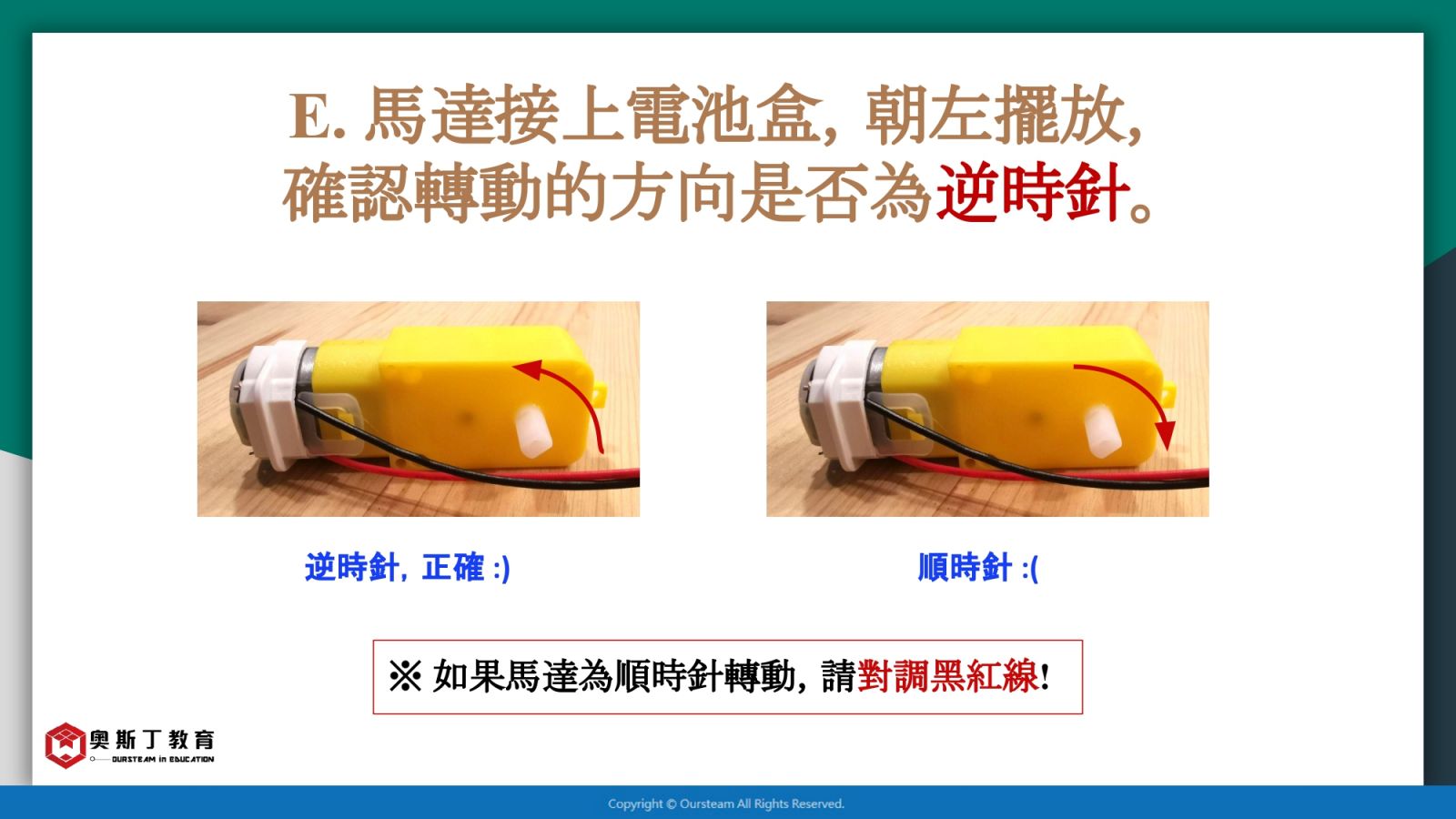
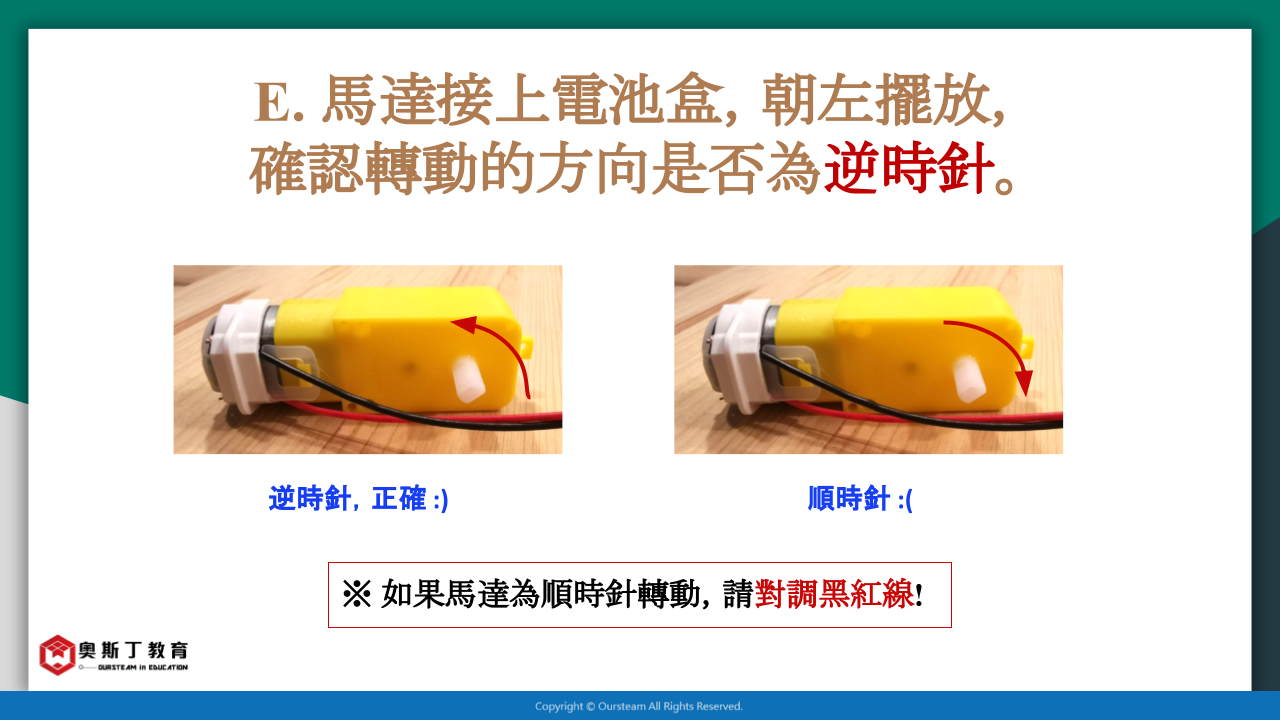
- 開啟電源開關,確定馬達往後方旋轉
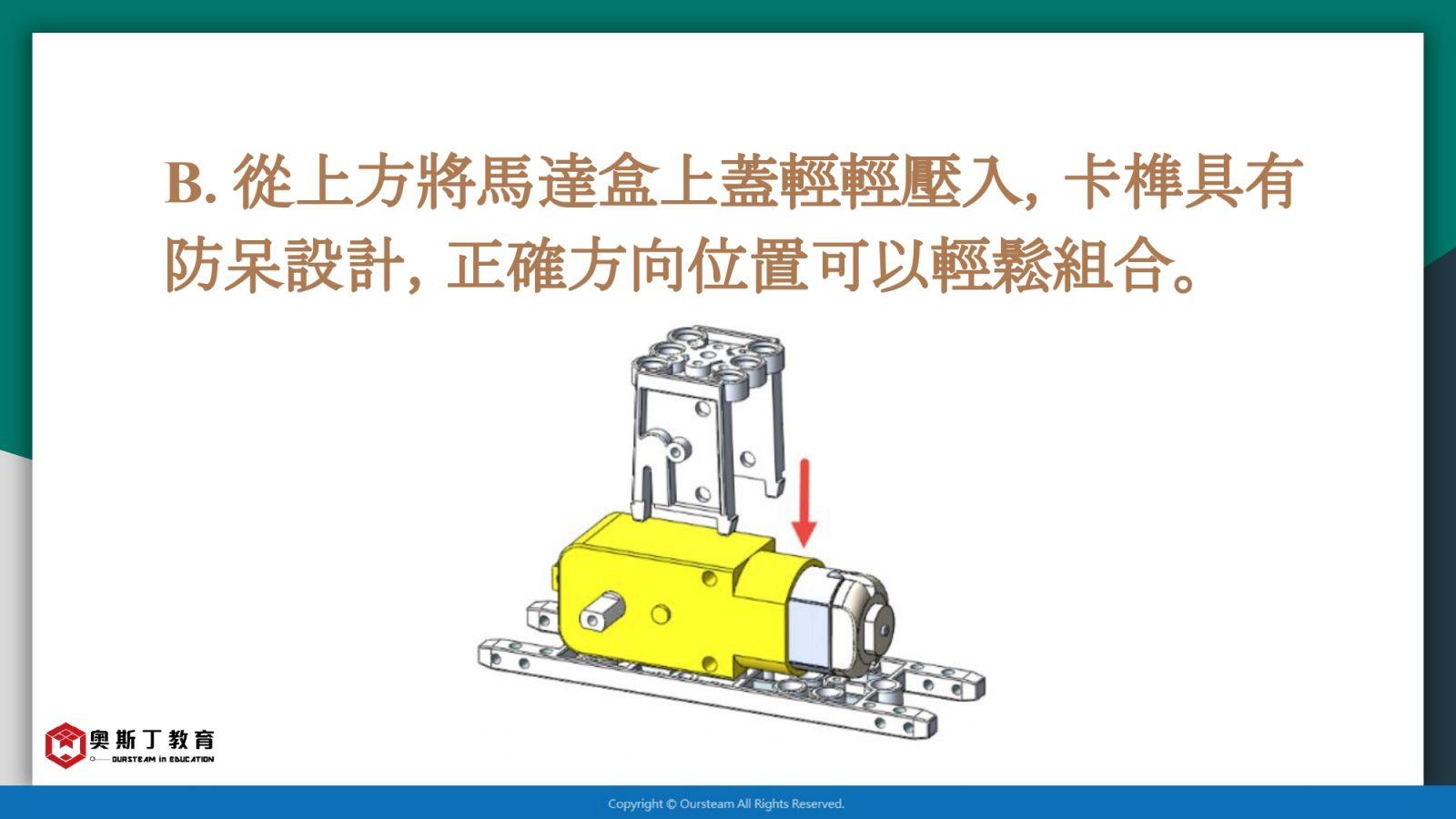
- 蓋上上蓋。如果轉向相反,將馬達水平翻轉180度再蓋上上蓋組合即可
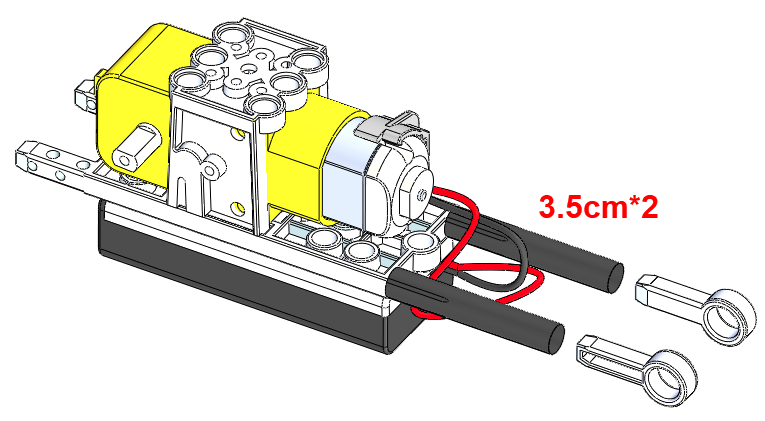
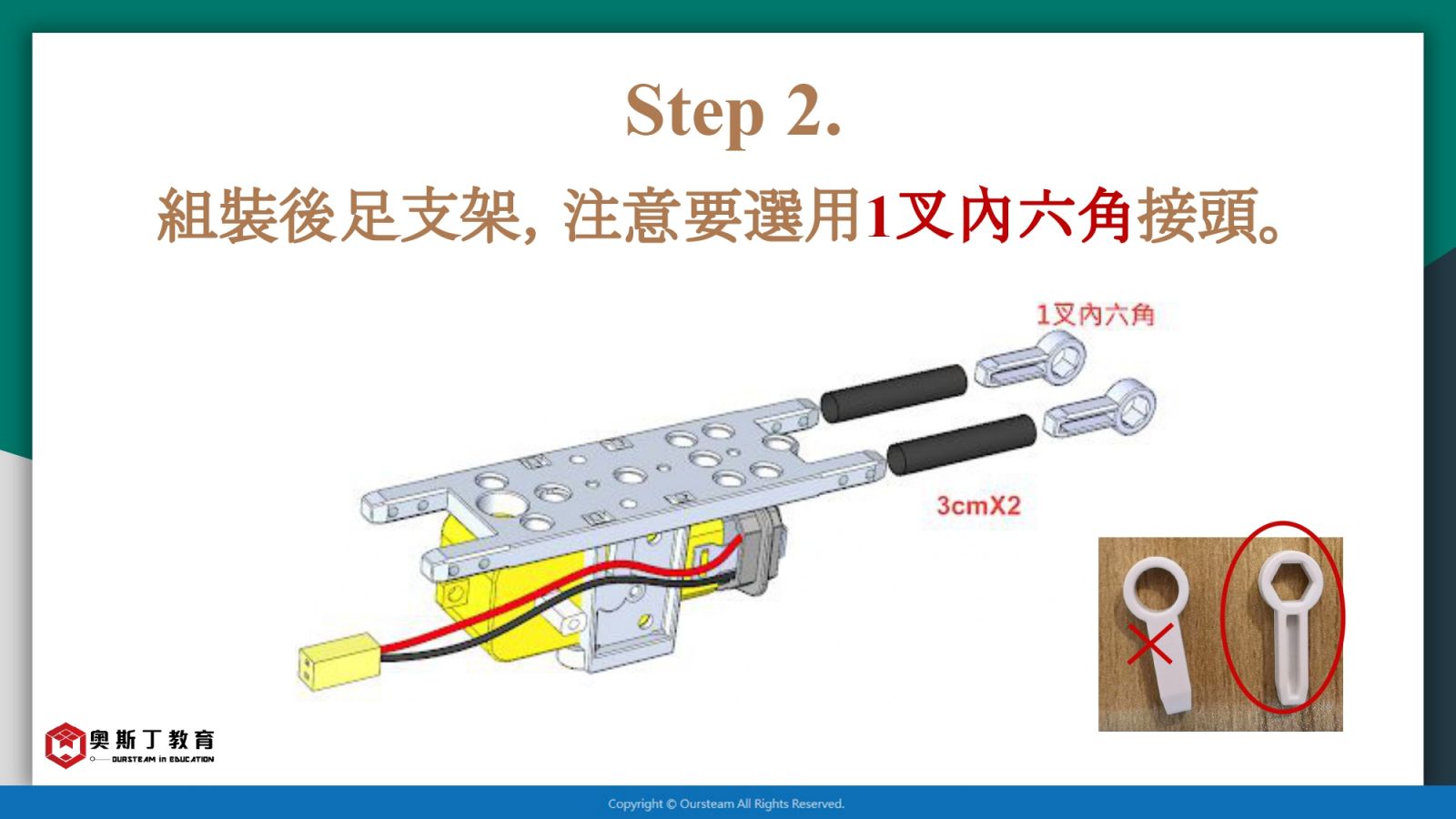
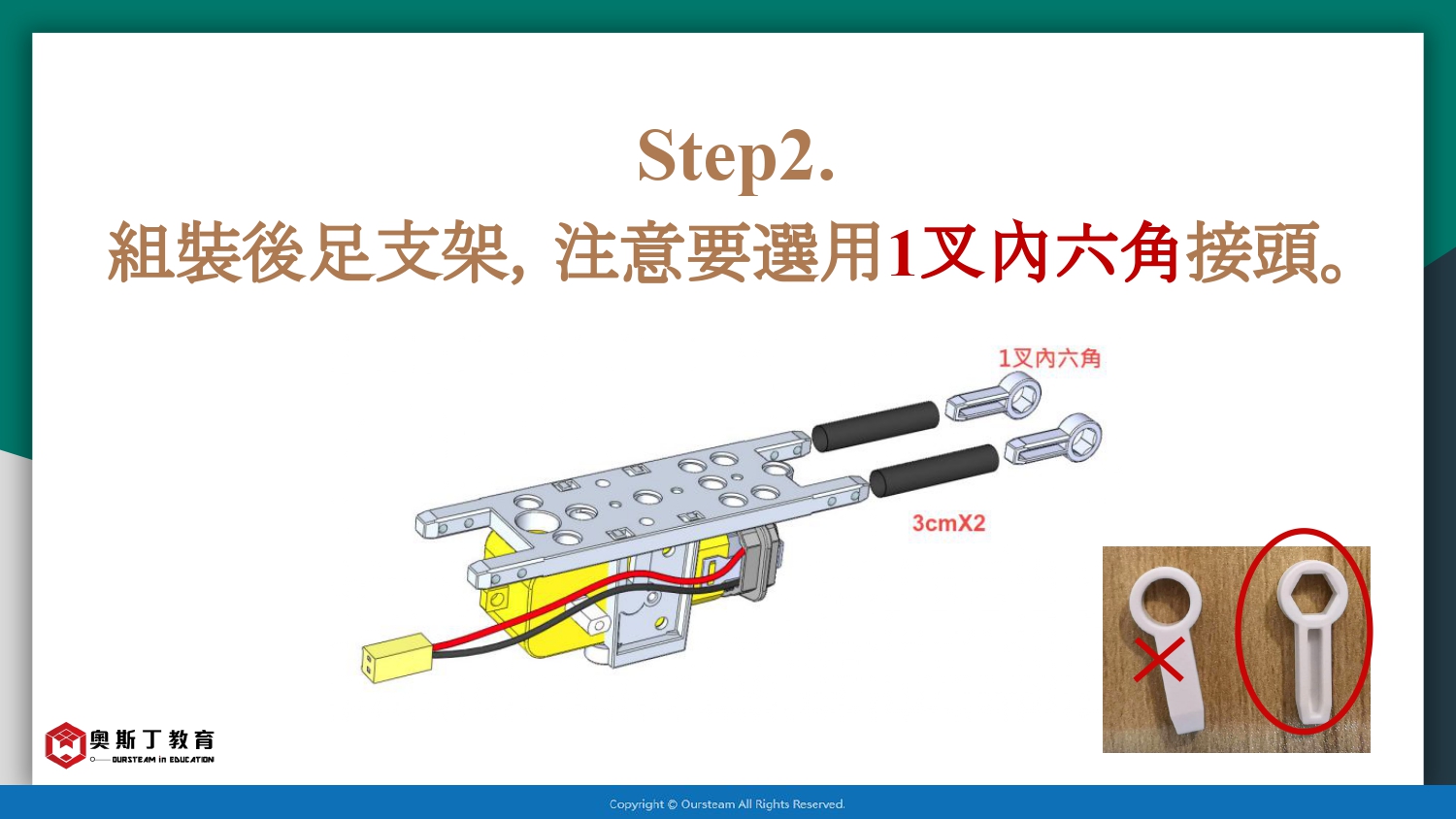
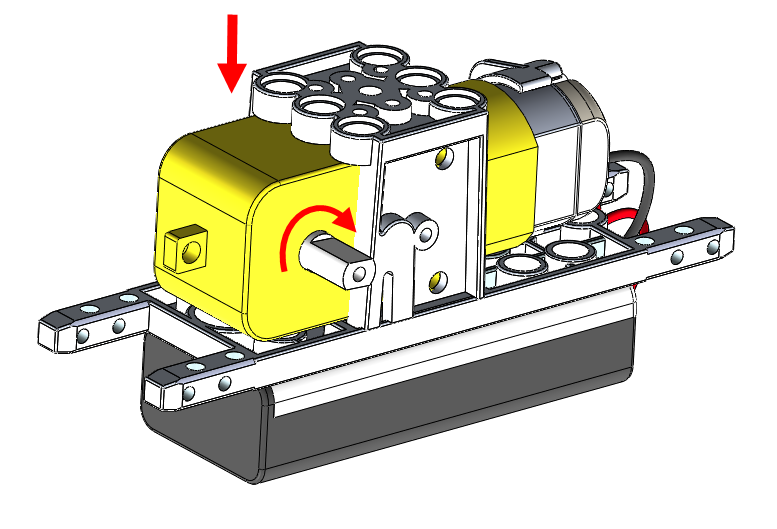
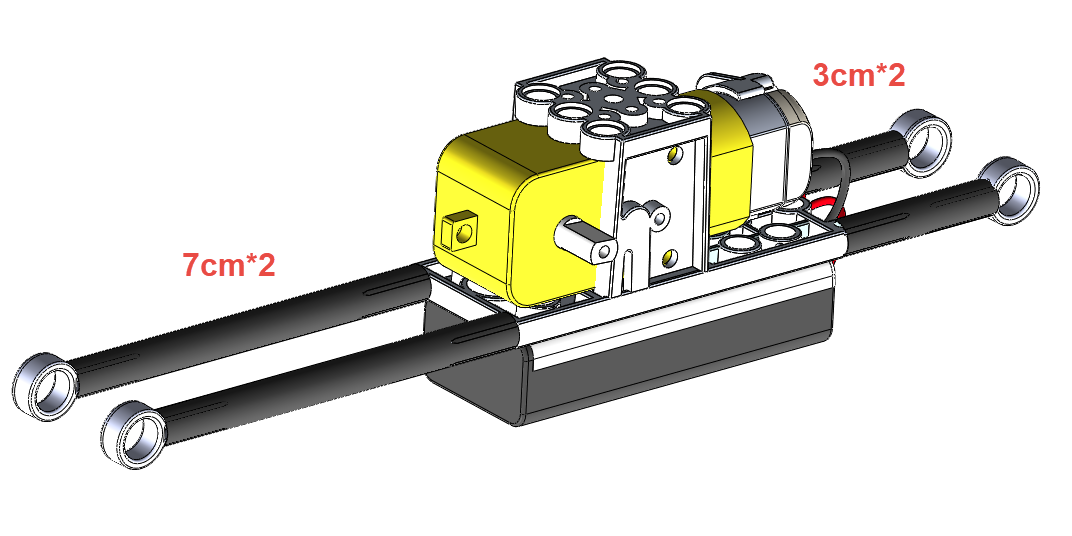
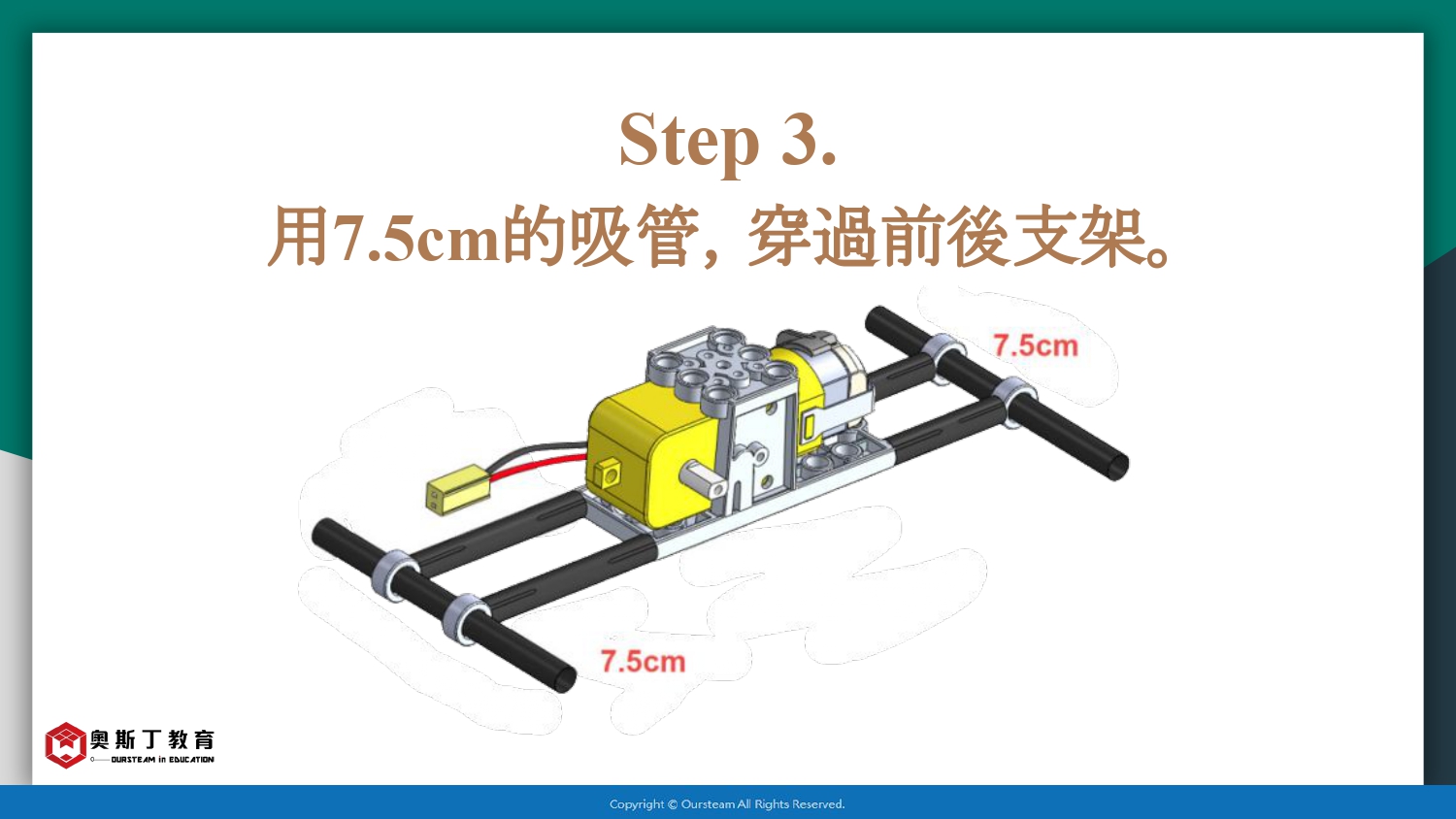
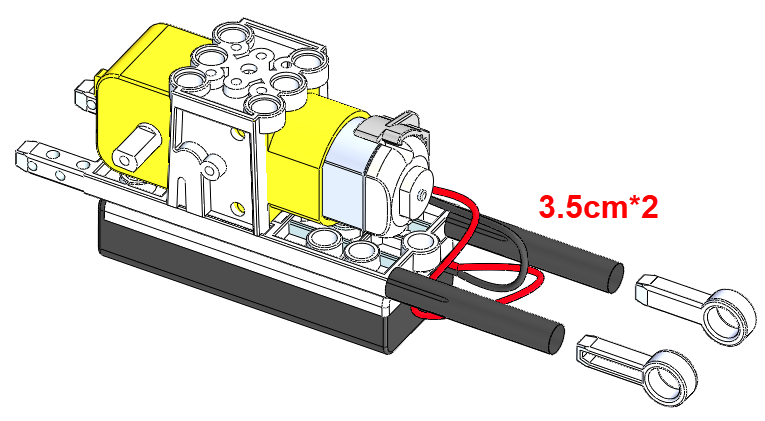
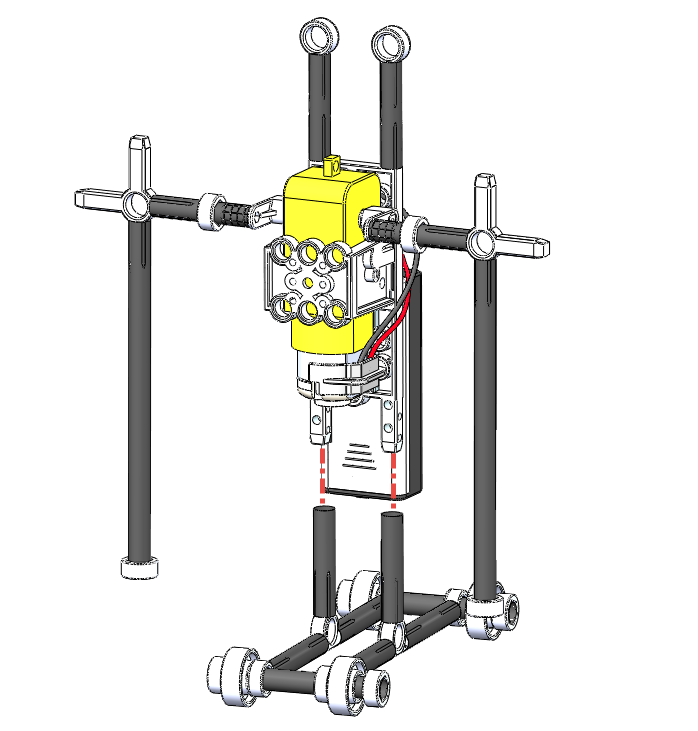
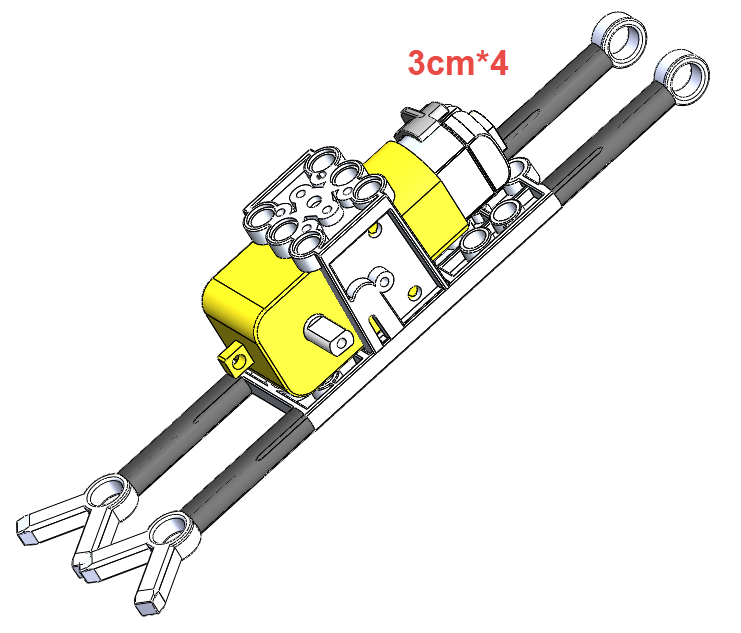
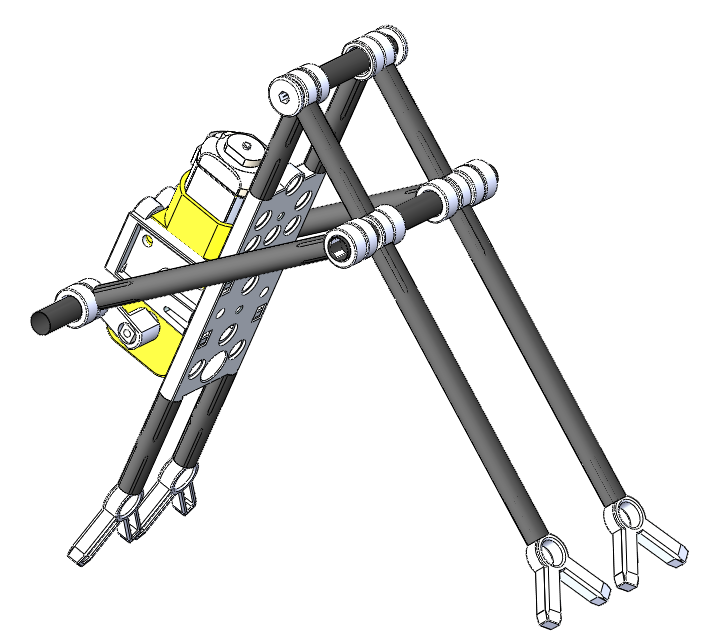
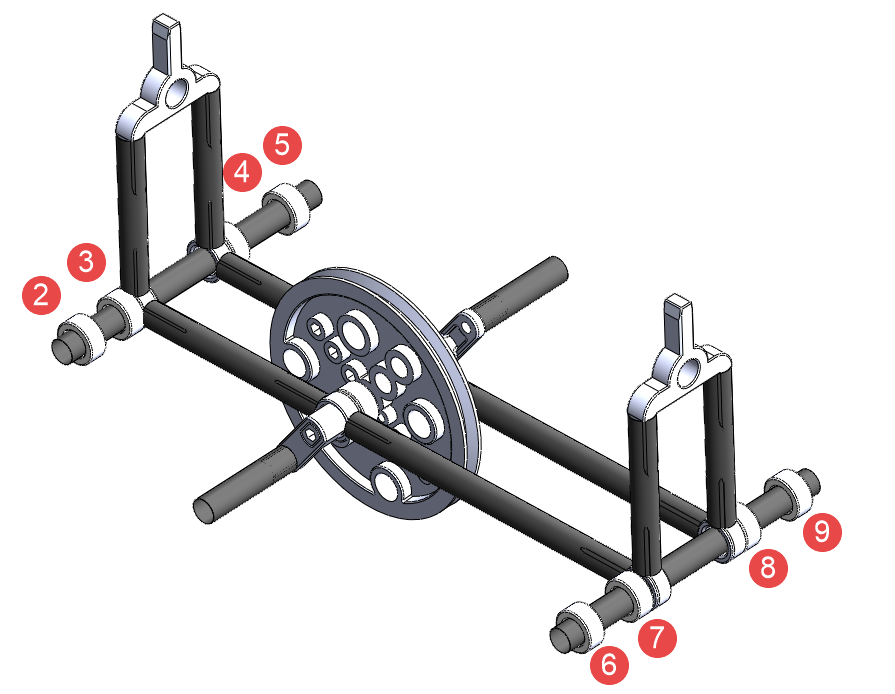
Step 2. 組裝前後支架
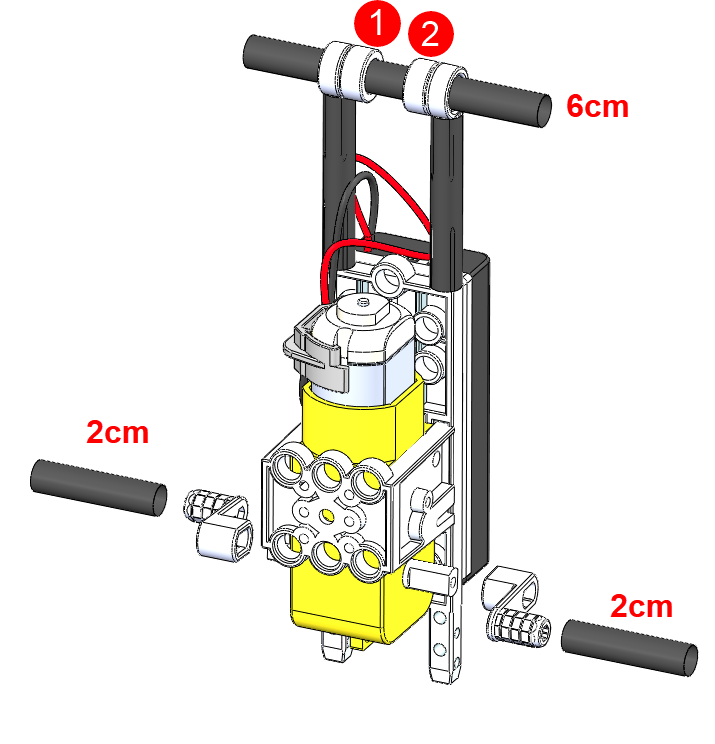
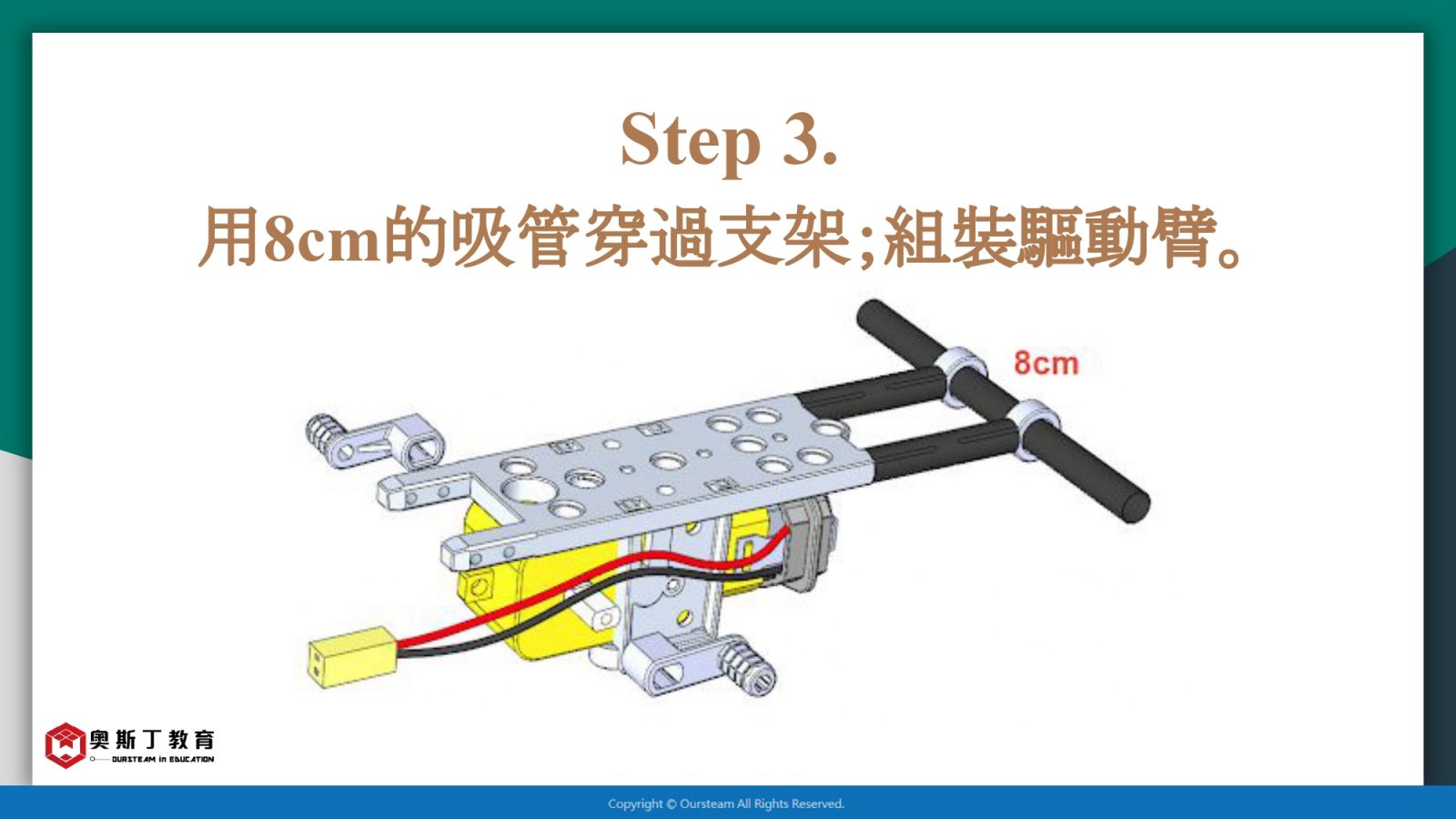
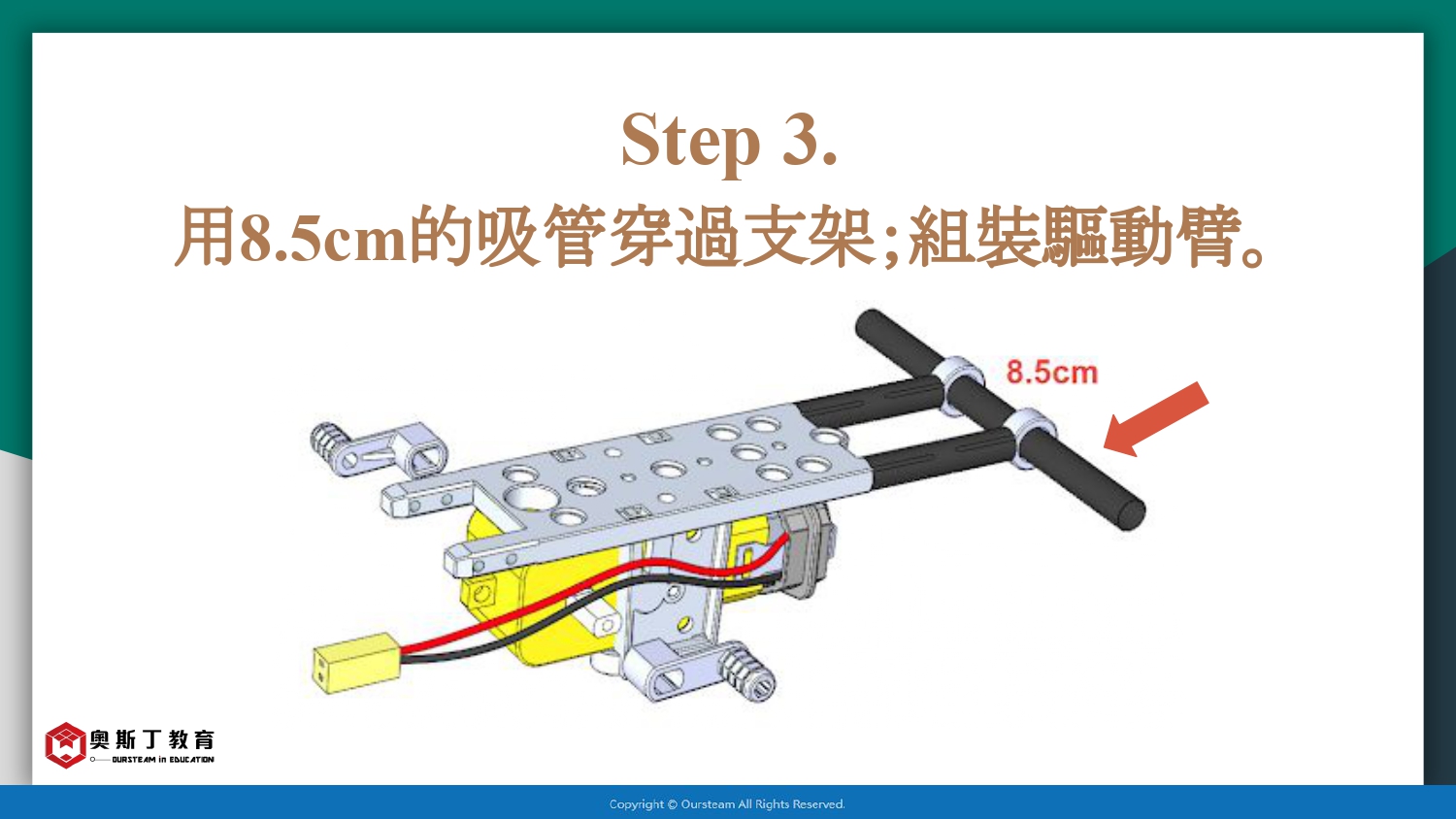
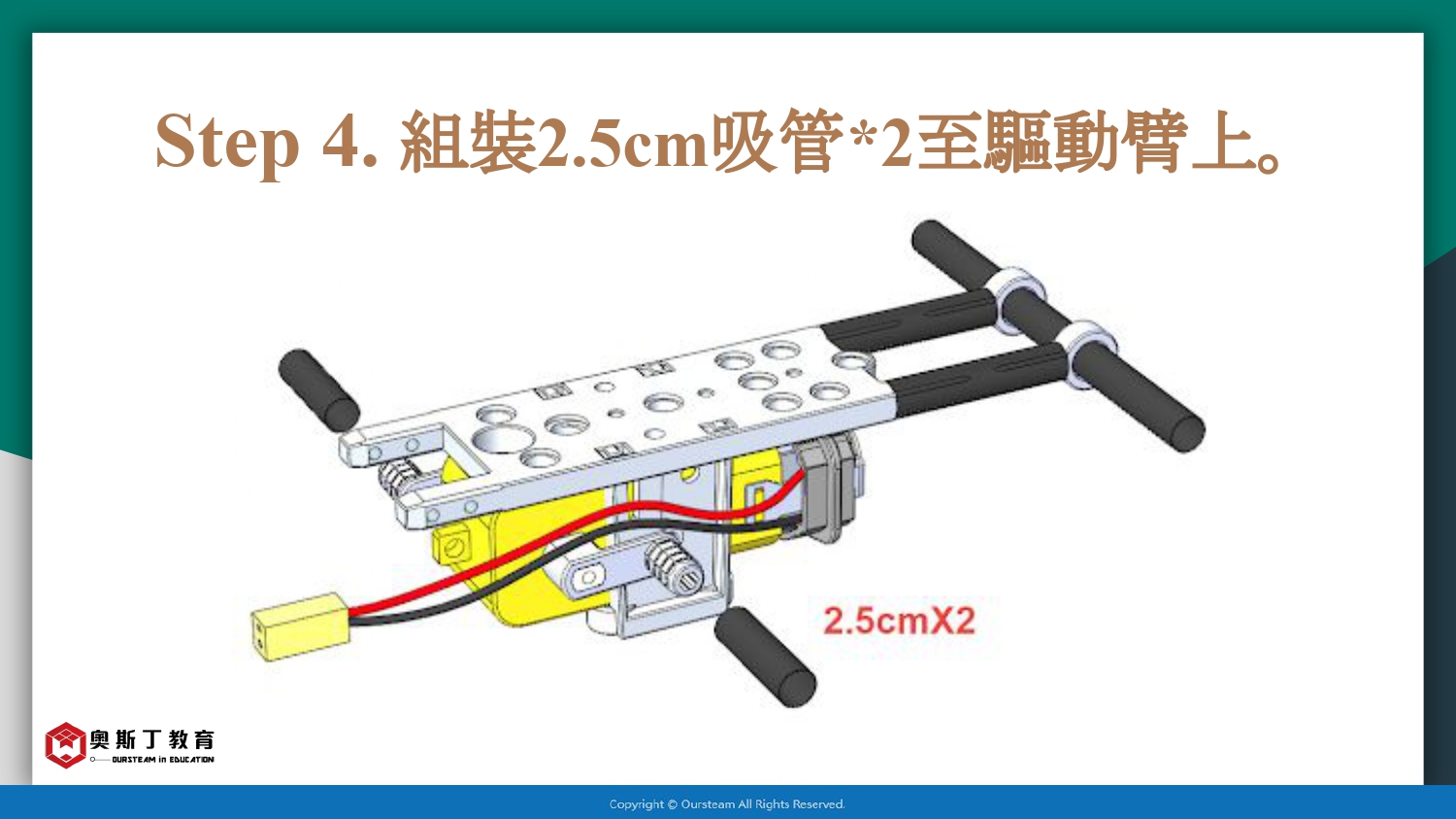
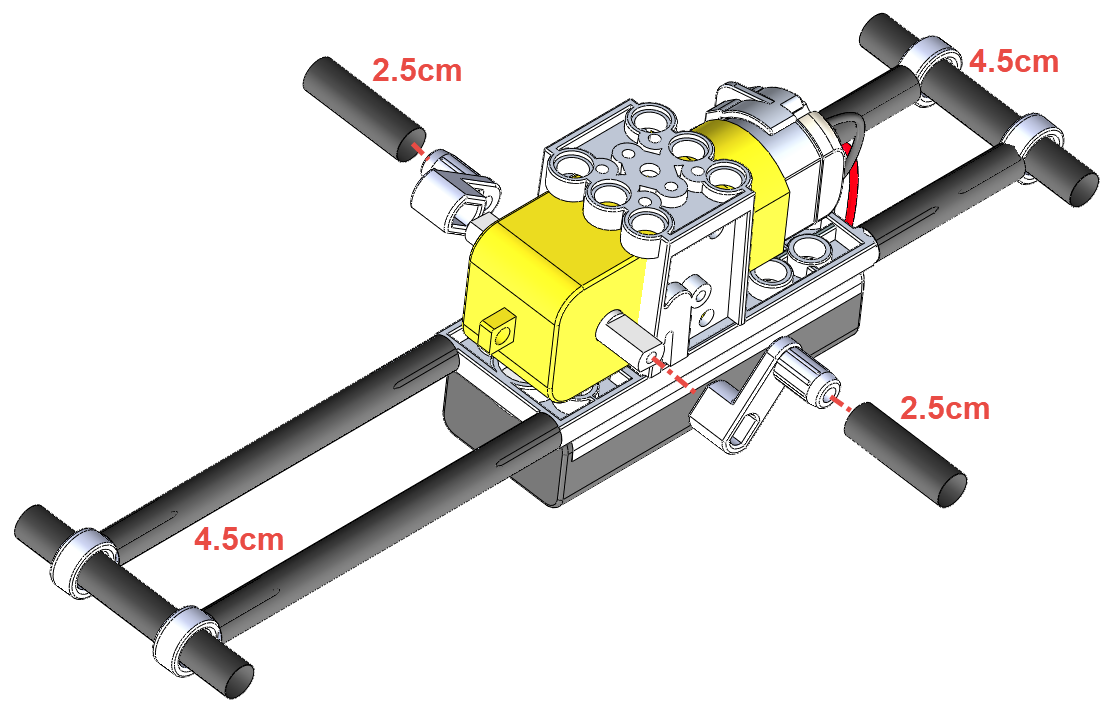
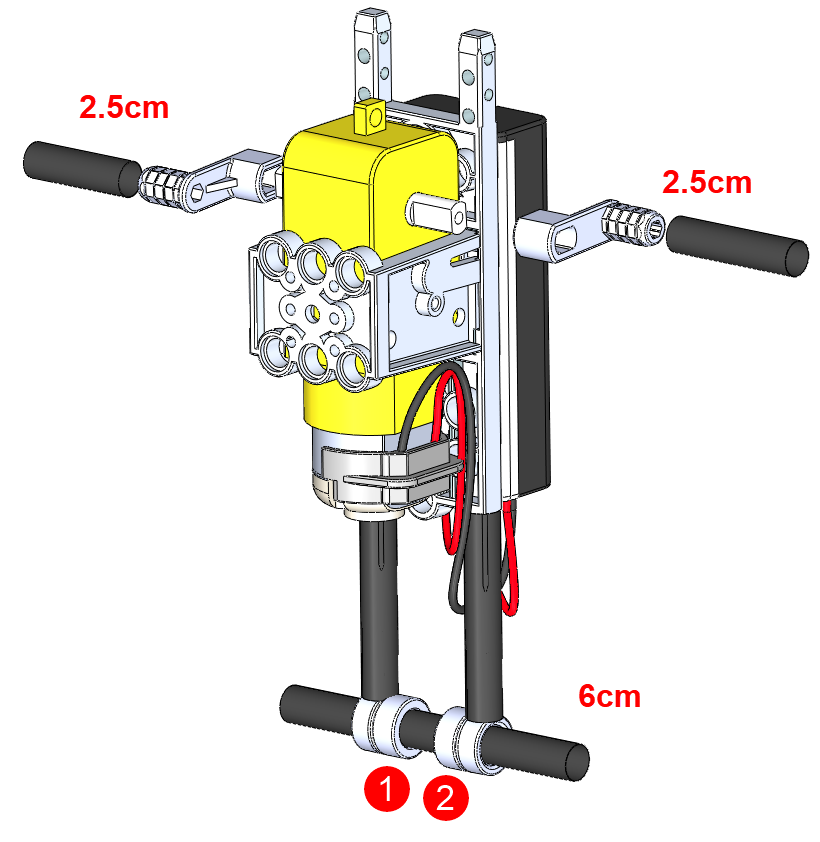
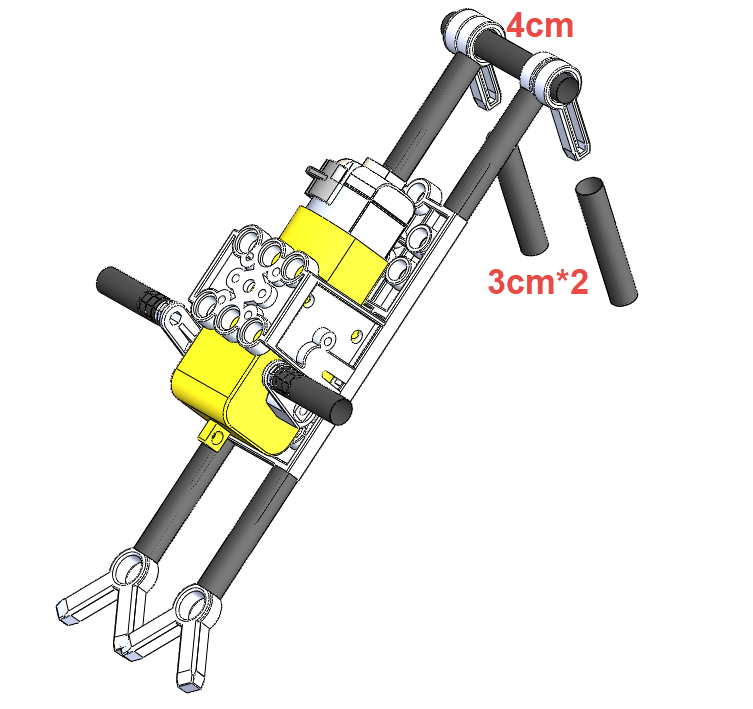
Step 3. 組裝驅動臂與橫桿
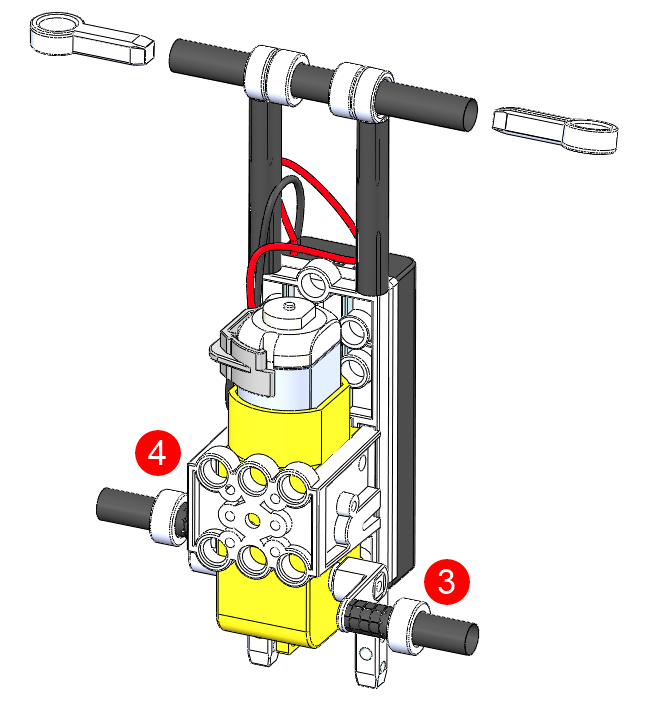
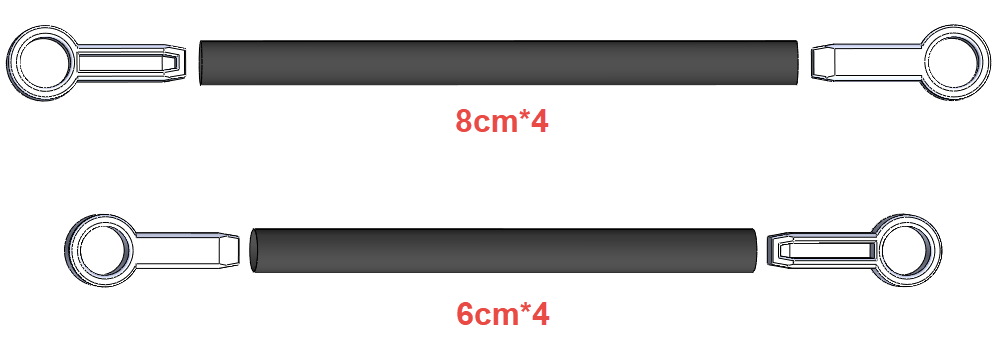
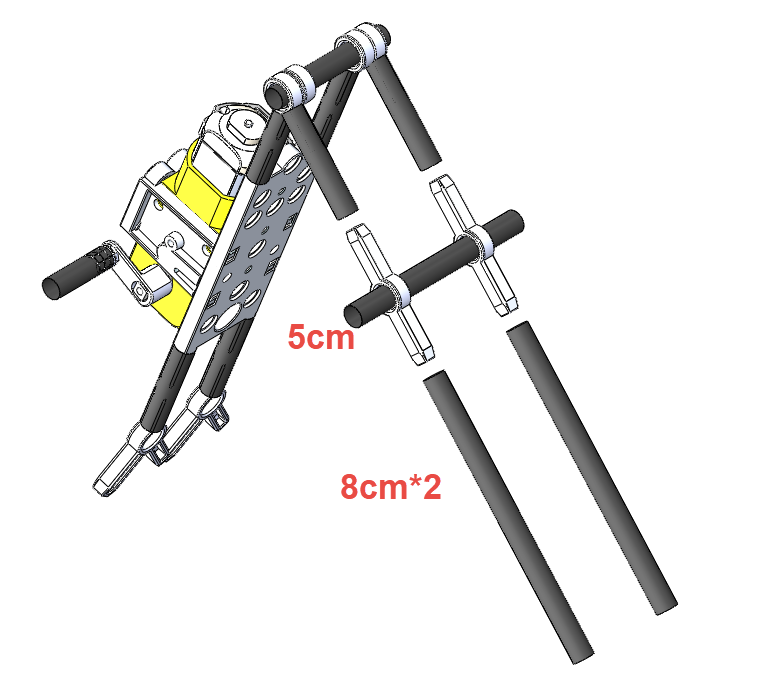
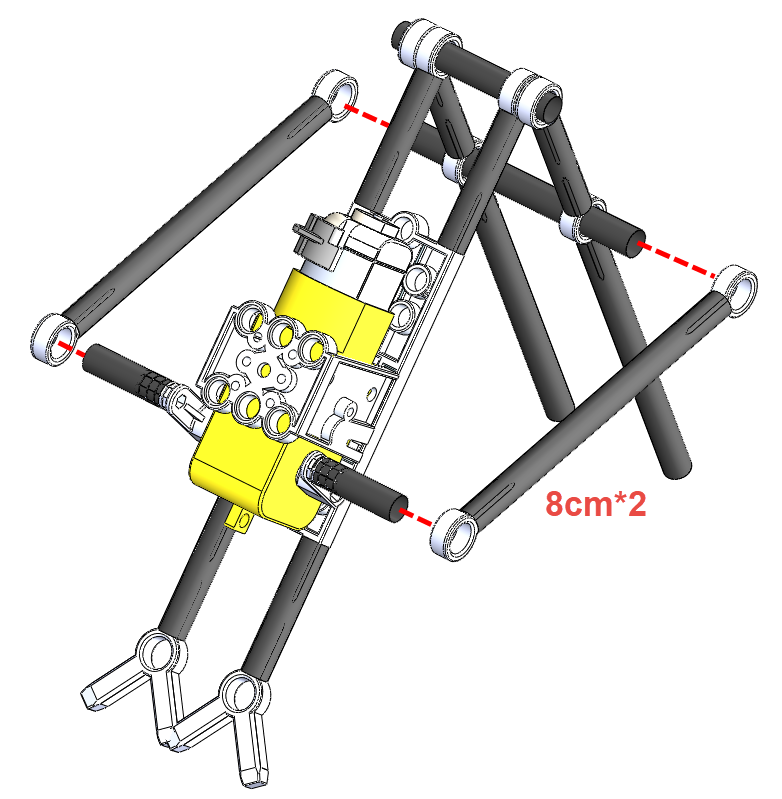
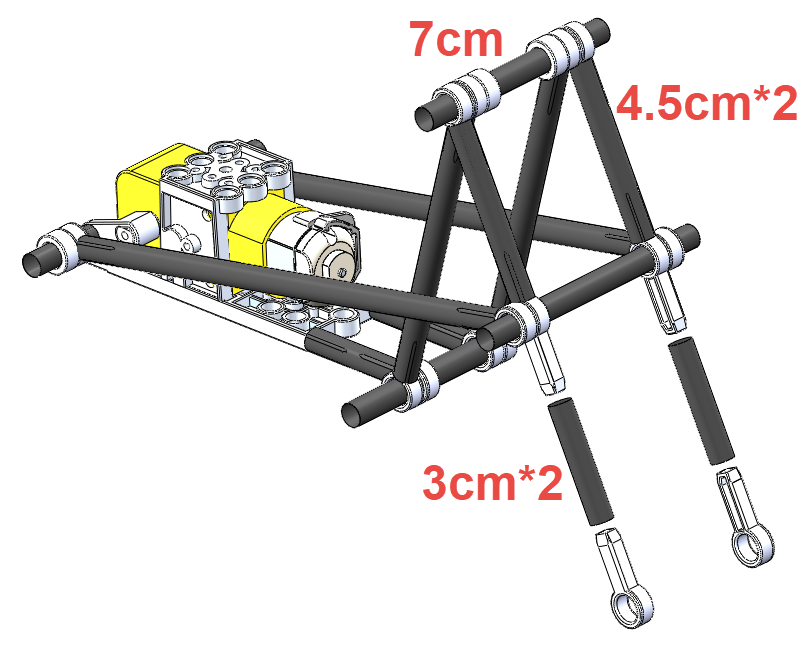
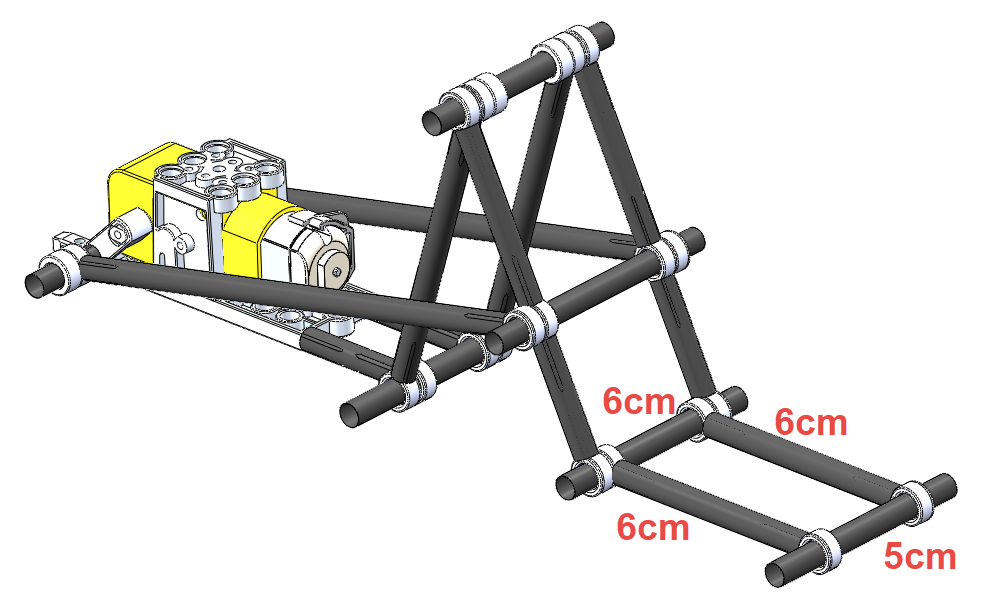
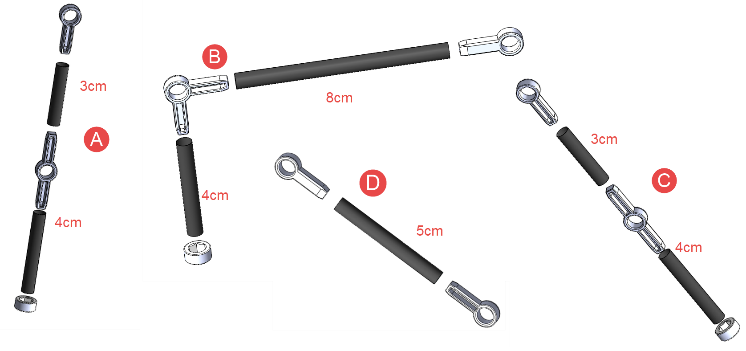
Step 4. 以16只1叉接頭和6cm與8cm吸管構成連桿,各做4組
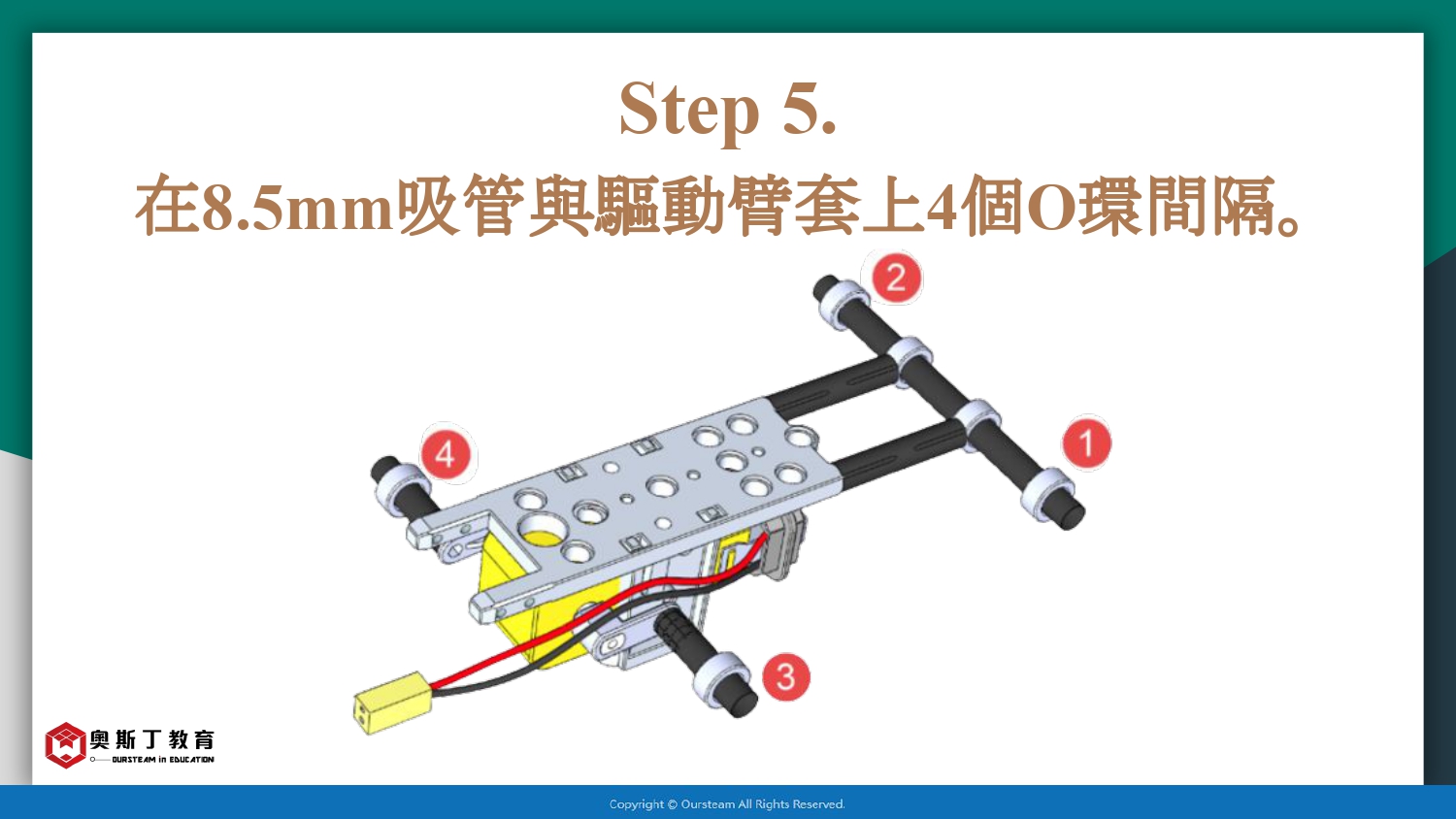
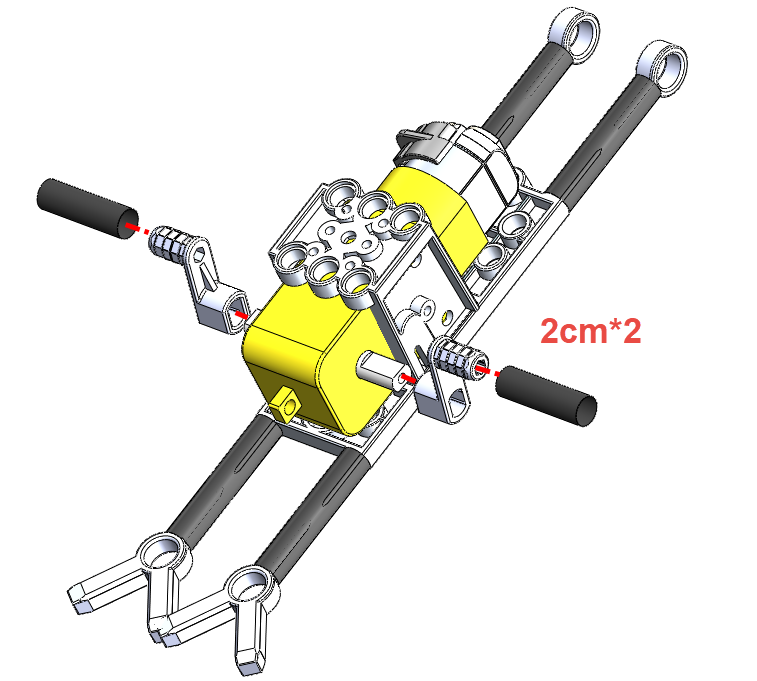
Step 5. 以O環定位6cm與8cm連桿,足部下方2cm橫桿與O環是為增加接觸地面的面積。
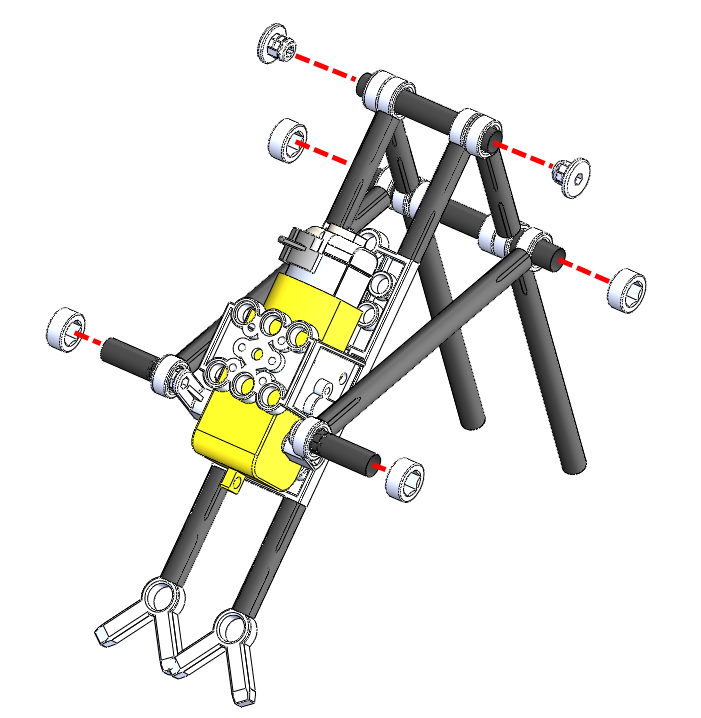
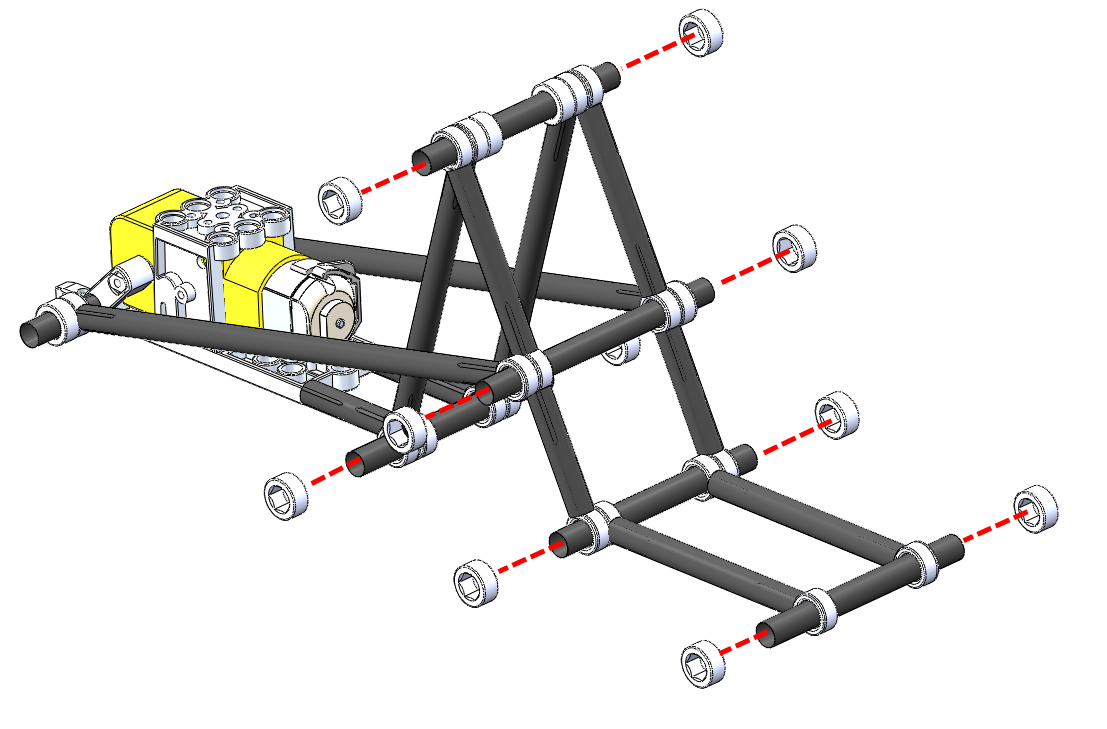
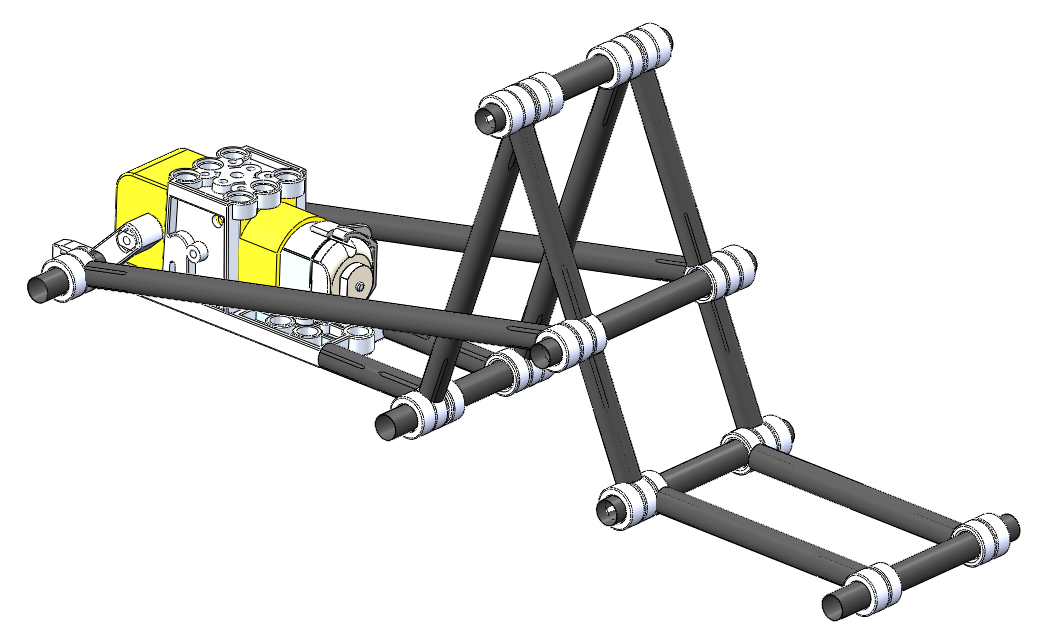
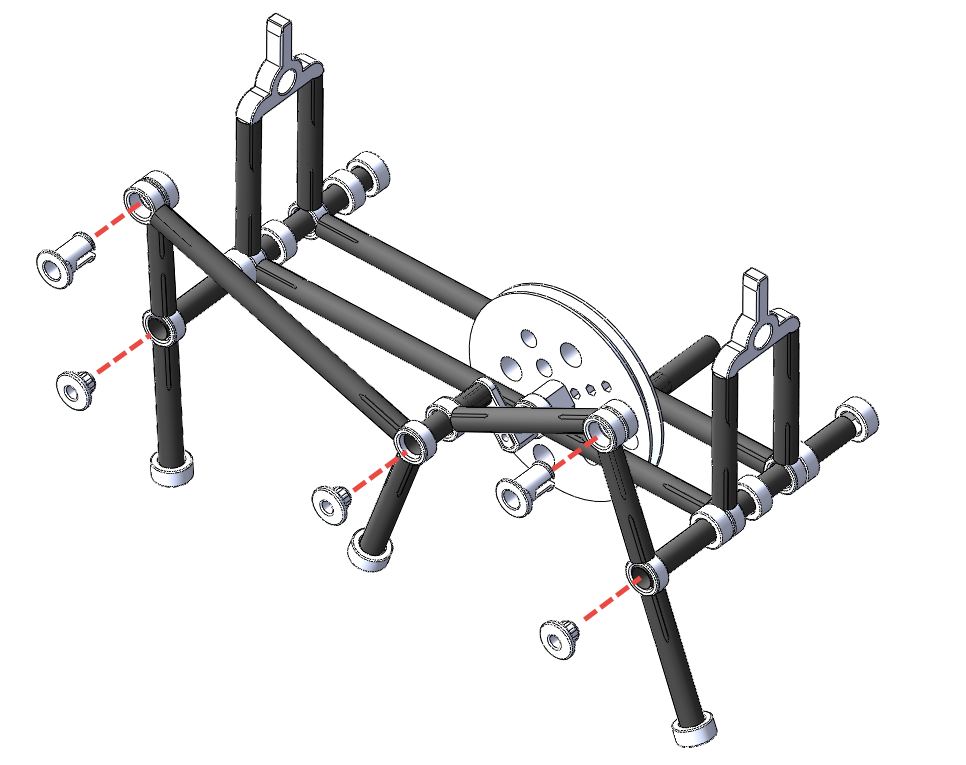
Step 6. 繼續使用端面扣釘與O環,定位各個關節
實作五、六足行走機器人-連桿簡介
六足行走機器人,跨步時至少有3足抓住地面,和其他機器人相比之下是相對穩定的行走模式。
吸管機器人材料準備(不含悟空版及V2主板)吸管與長度組裝參考步驟
電池版本行走影片
實作六、戰鬥蝸牛 簡介
以曲柄延伸的3叉接頭劃動地面來前進,底部整個貼住地面,摩擦力較大,緩步向前推進。

吸管機器人材料準備(不含V2主板及悟空版)

吸管長度
組裝參考步驟

電池版本 行走影片
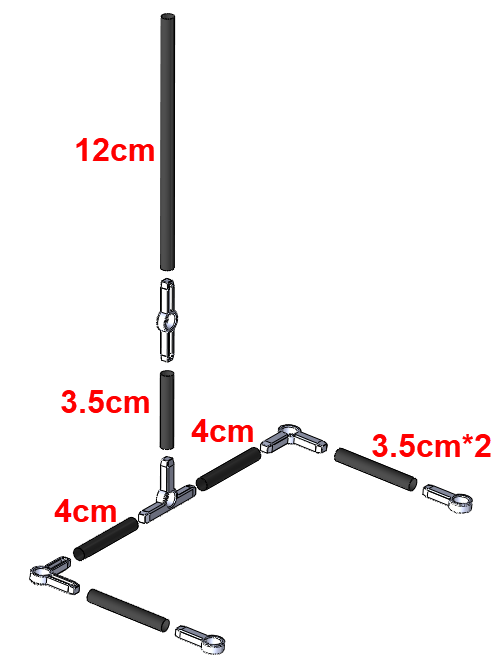
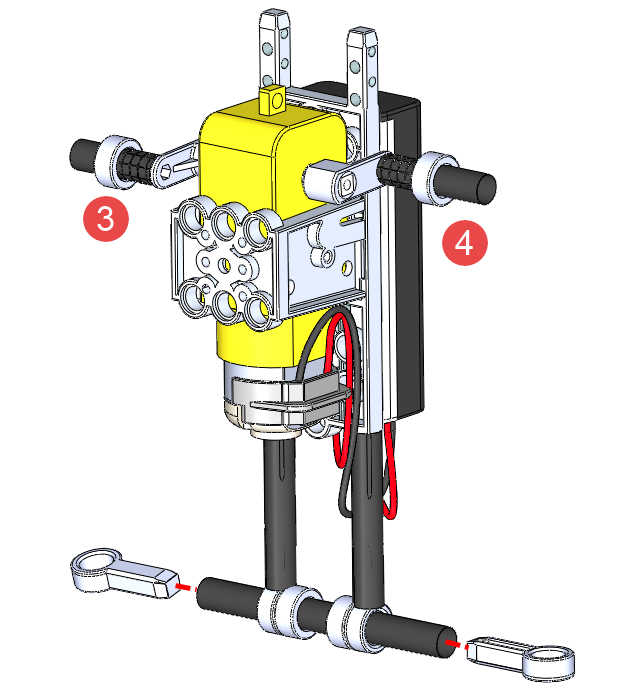
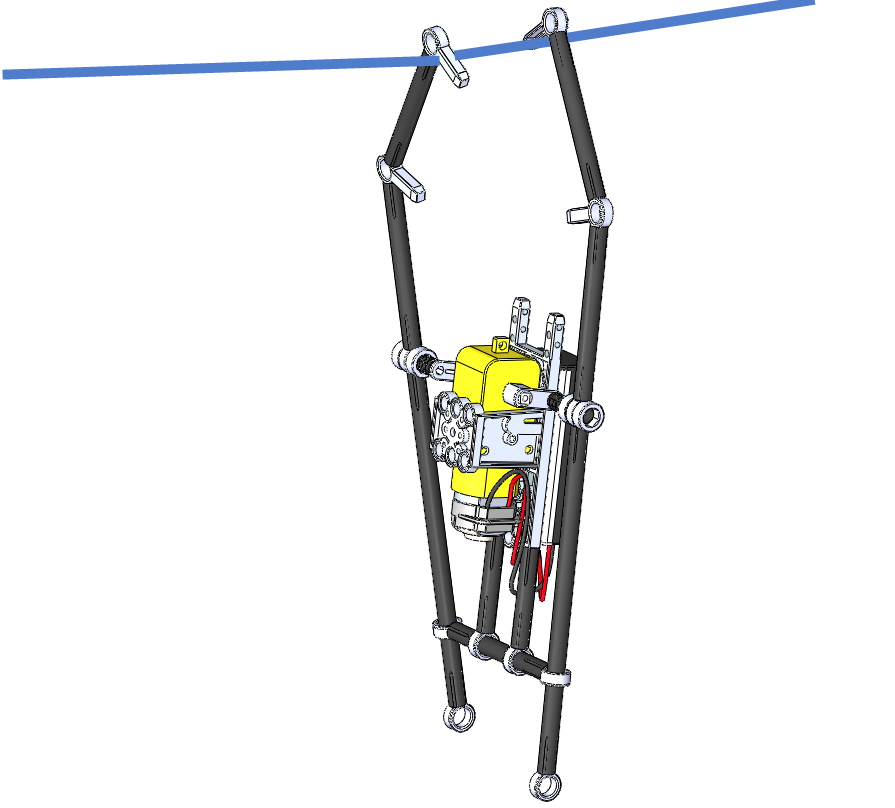
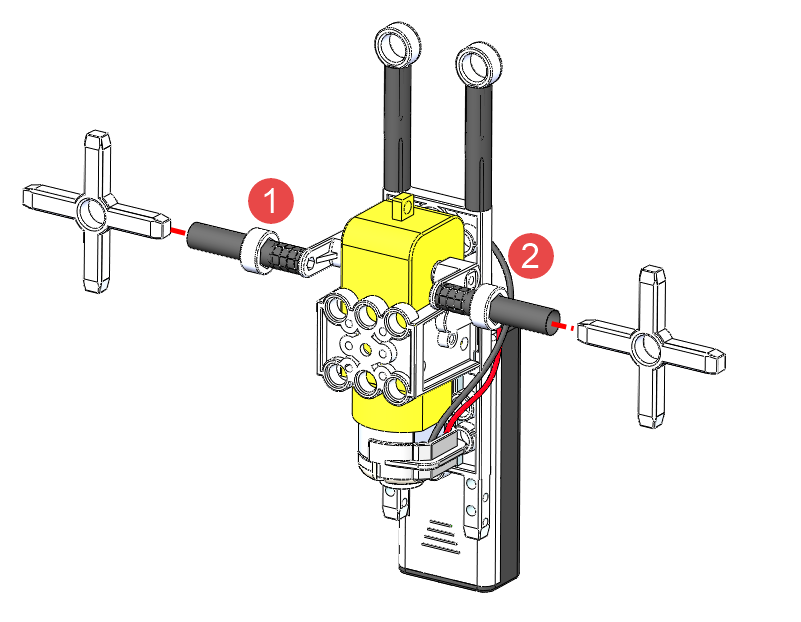
實作七、攀爬猴簡介主結構是搖動滑塊曲柄機構;延伸的長手臂,帶有90度的彎鉤,以維持懸吊重心,攀爬的動作生動有趣。
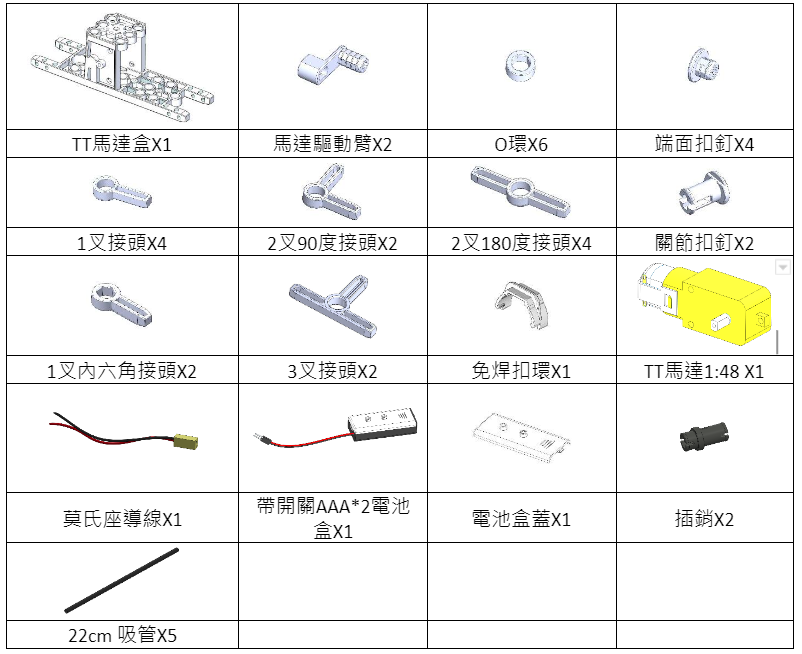
吸管機器人準備材料(不含V2主板及悟空板)
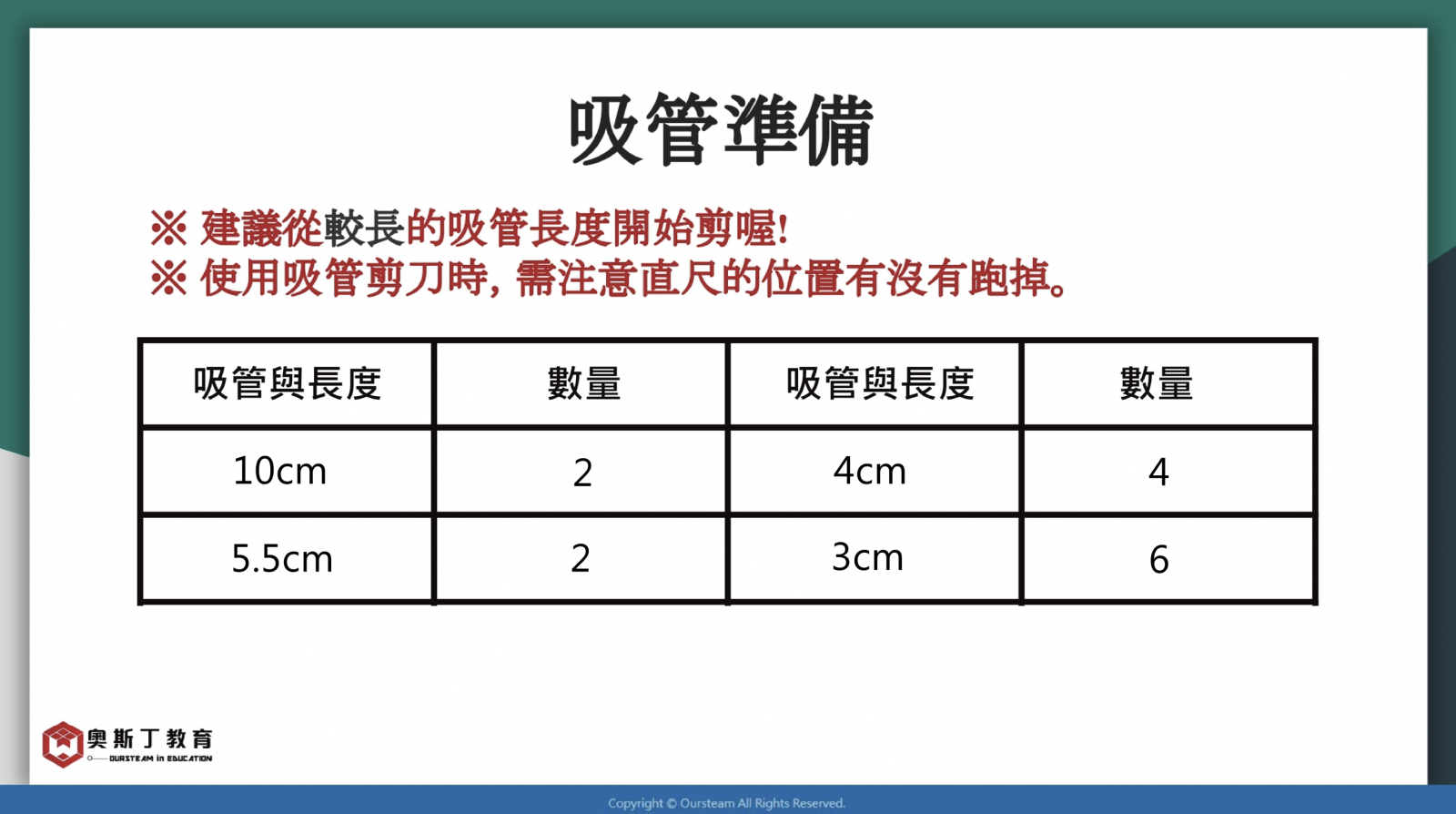
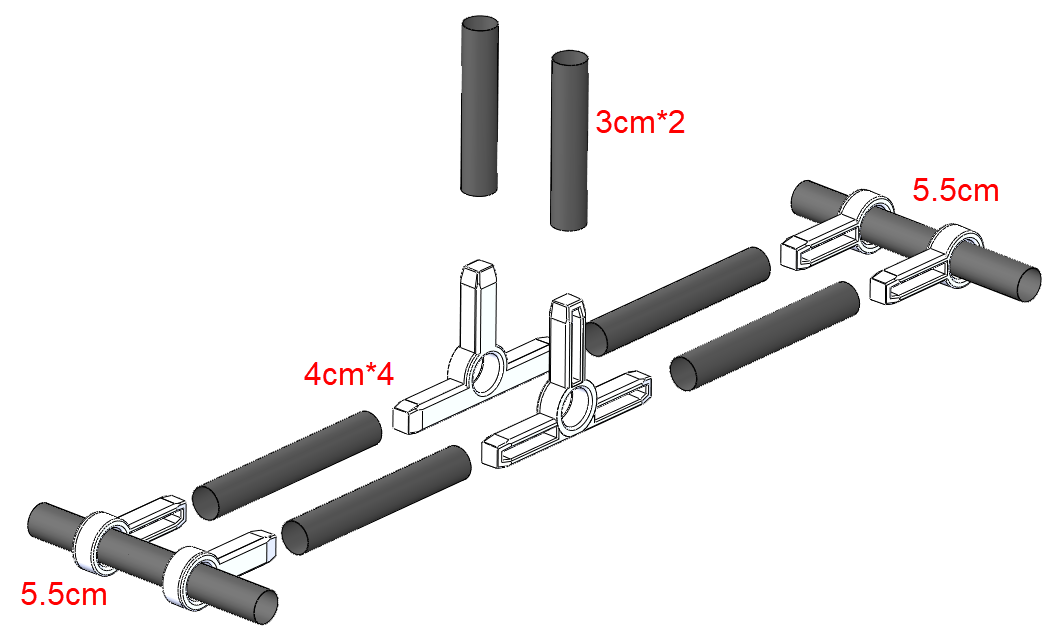
吸管與長度
組裝參考步驟
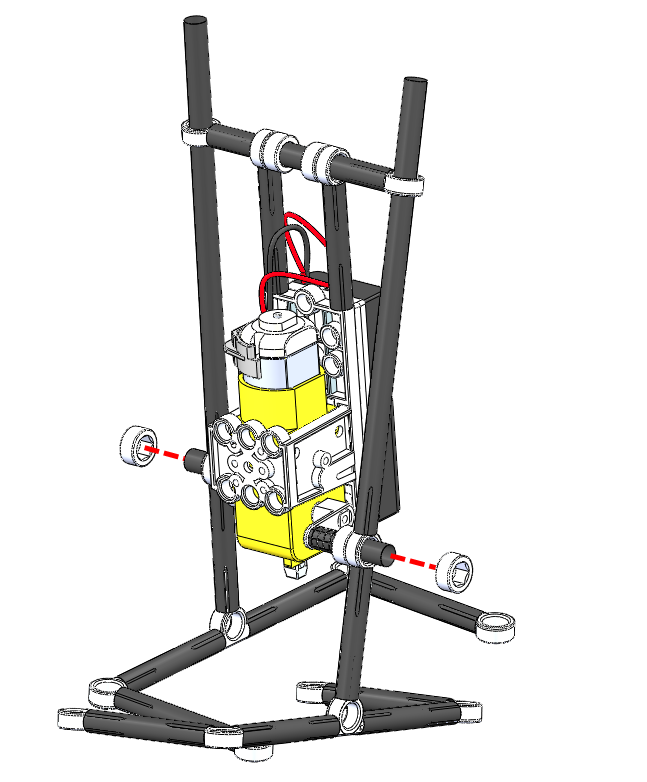
Step 1.
- 電池盒更換上蓋,裝入AAA*2電池
- 免焊扣環連結電池盒與馬達
- 開啟電源開關,確定馬達往前方旋轉
- 蓋上上蓋。如果轉向相反,將馬達水平翻轉180度再蓋上上蓋組合即可
Step 2. 組裝足部支架
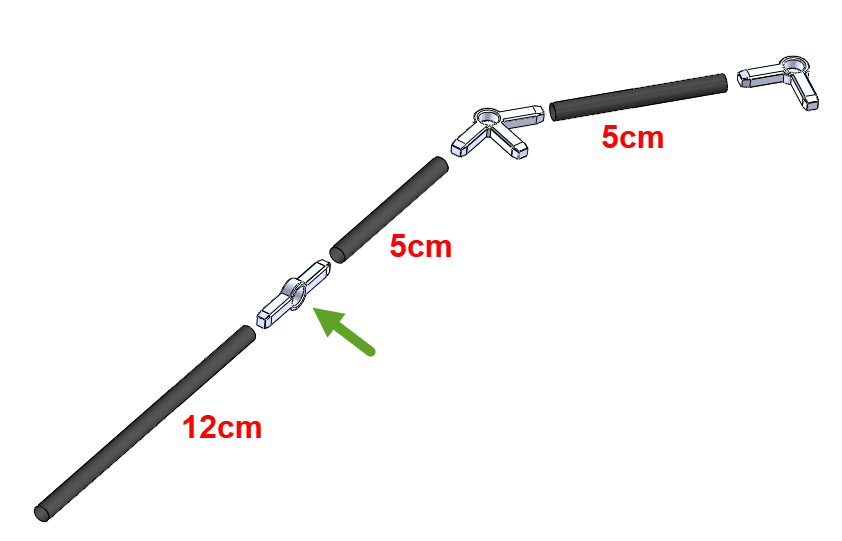
Step 3. 足部中間裝上2個O環間隔,穿過6cm吸管,組裝驅動臂
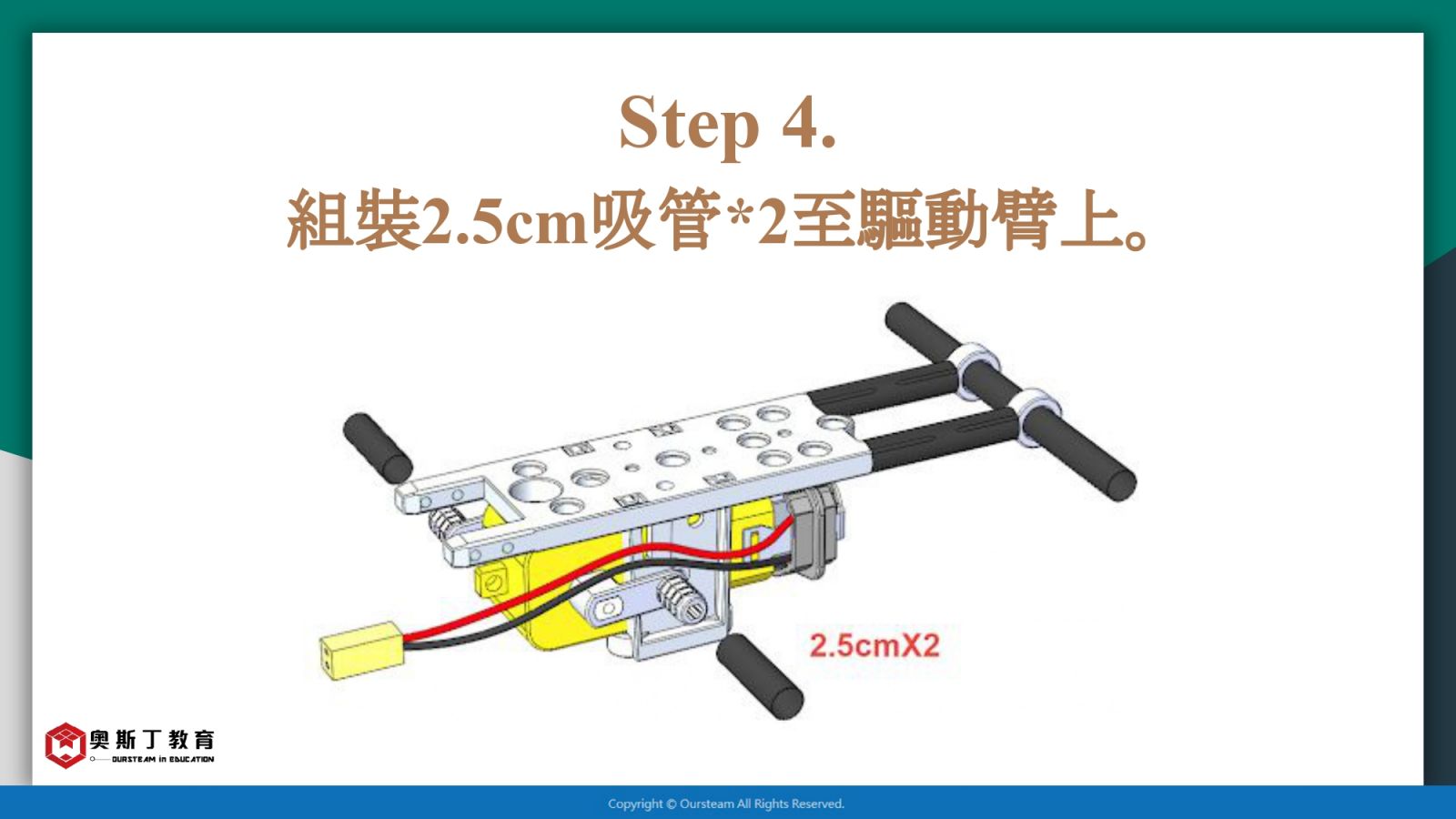
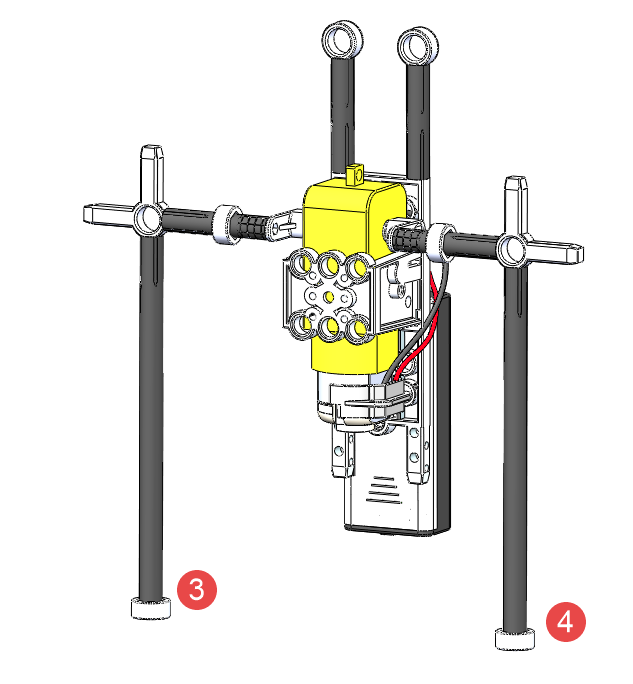
Step 4. 驅動臂套2個O環間隔,足部組裝
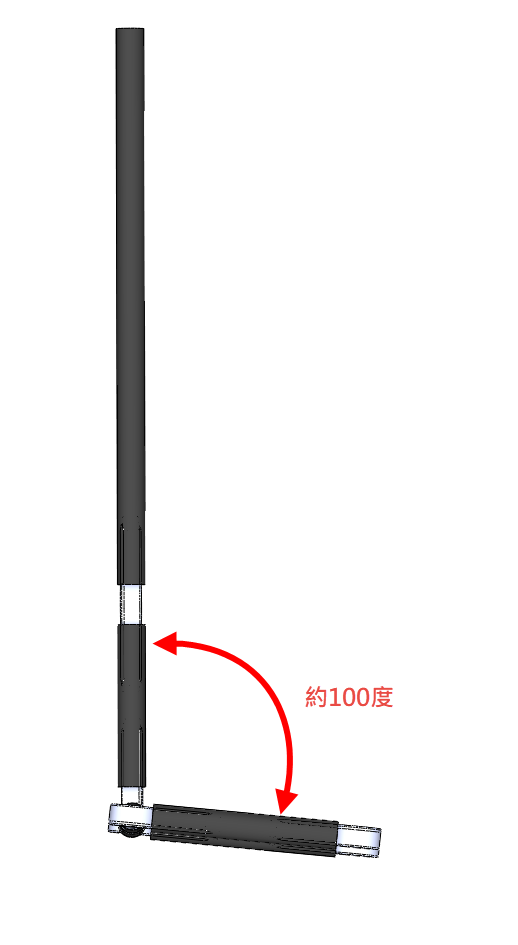
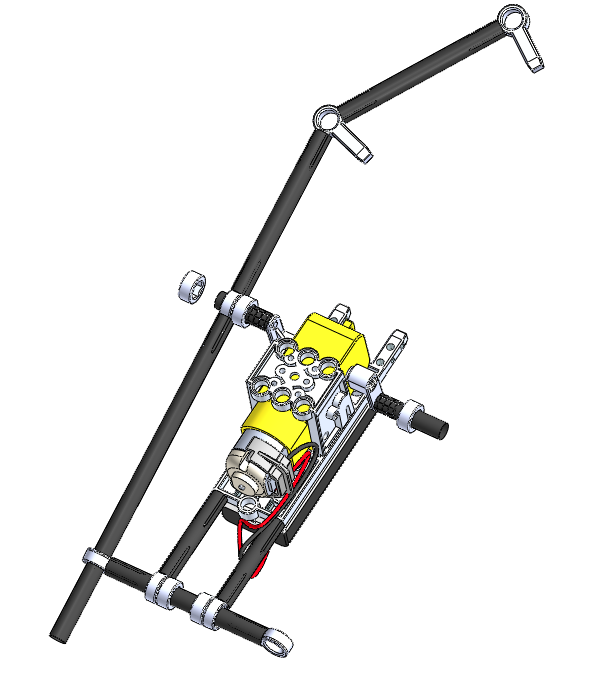
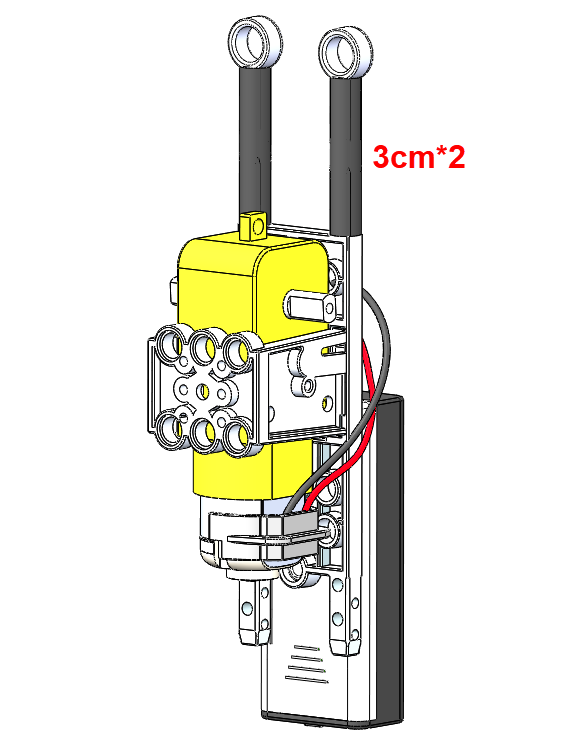
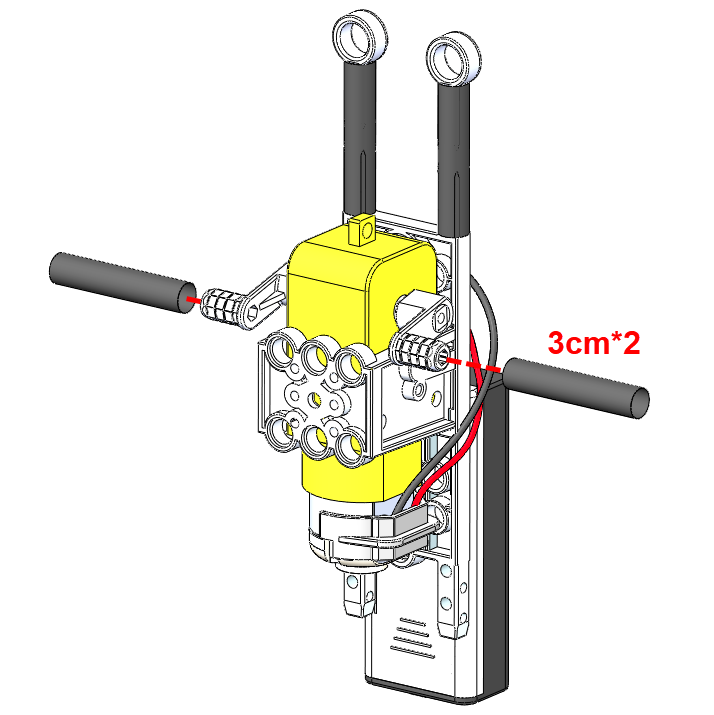
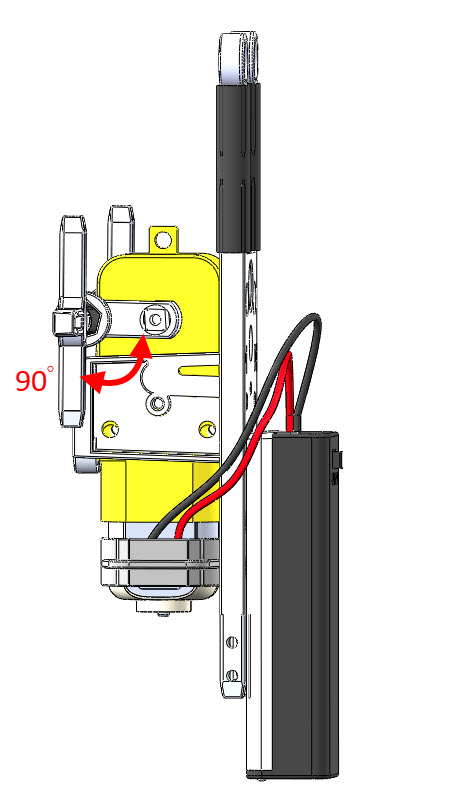
Step 5. 手臂組裝2組,請依序組裝,注意中間的2叉180度接頭件與上方是互相垂直的
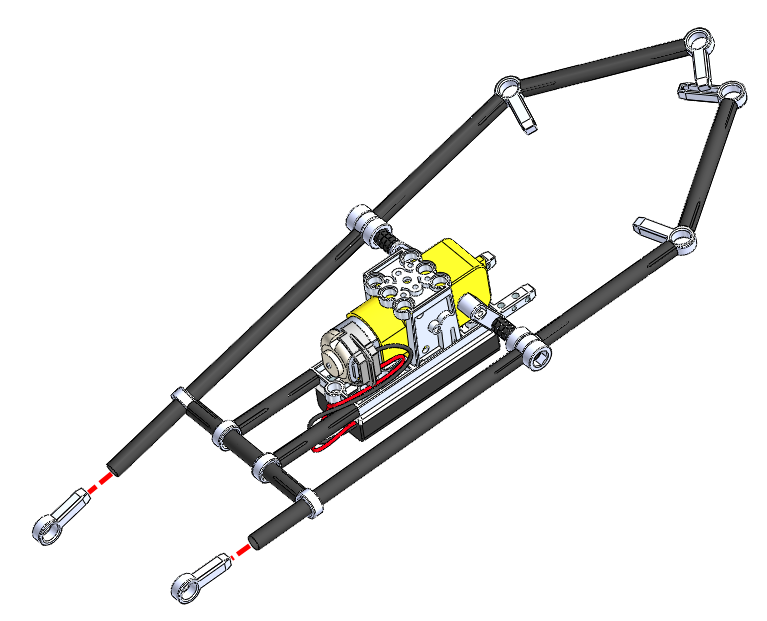
Step 6. 手臂穿過下方軸孔,以O環定位在驅動臂上
Step 7. 兩側手臂組好,下方組裝1叉接頭
完成後,你可以水平繫緊一條繩索,把攀爬猴掛在繩子上,啟動電源,看看它生動的攀爬動作。
實作八、不倒翁簡介不倒翁透過長桿劃過地面帶動,最有趣的地方在於:當不倒翁往前、往後或兩側傾倒,他都會迅速恢復站立,他的奧秘在哪裡呢?
吸管機器人準備材料(不含V2主板及悟空板)
吸管與長度
組裝參考步驟
Step 1.
- 電池盒更換上蓋,裝入AAA*2電池
- 免焊扣環連結電池盒與馬達
- 開啟電源開關,確定馬達往後方旋轉
- 蓋上上蓋。如果轉向相反,將馬達水平翻轉180度再蓋上上蓋組合即可
Step 2. 裝飾眼睛
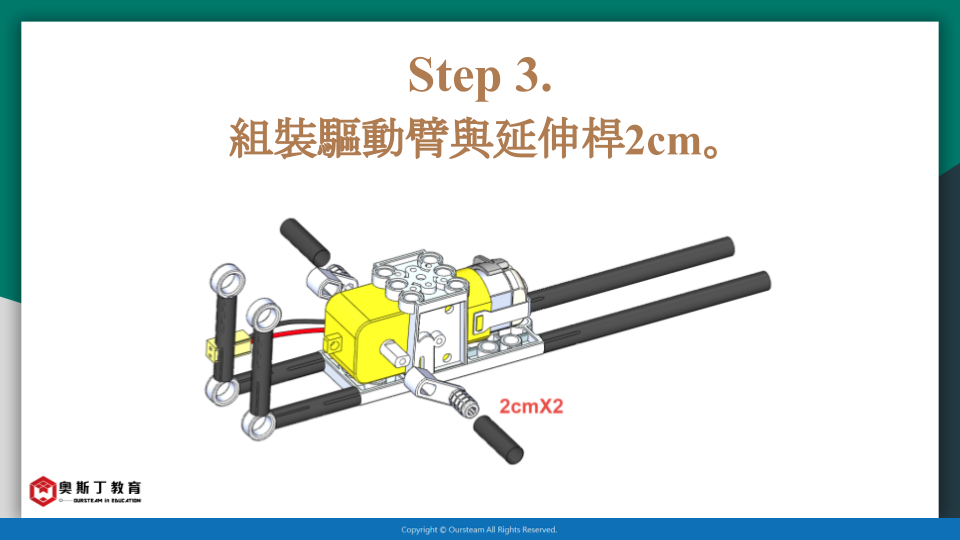
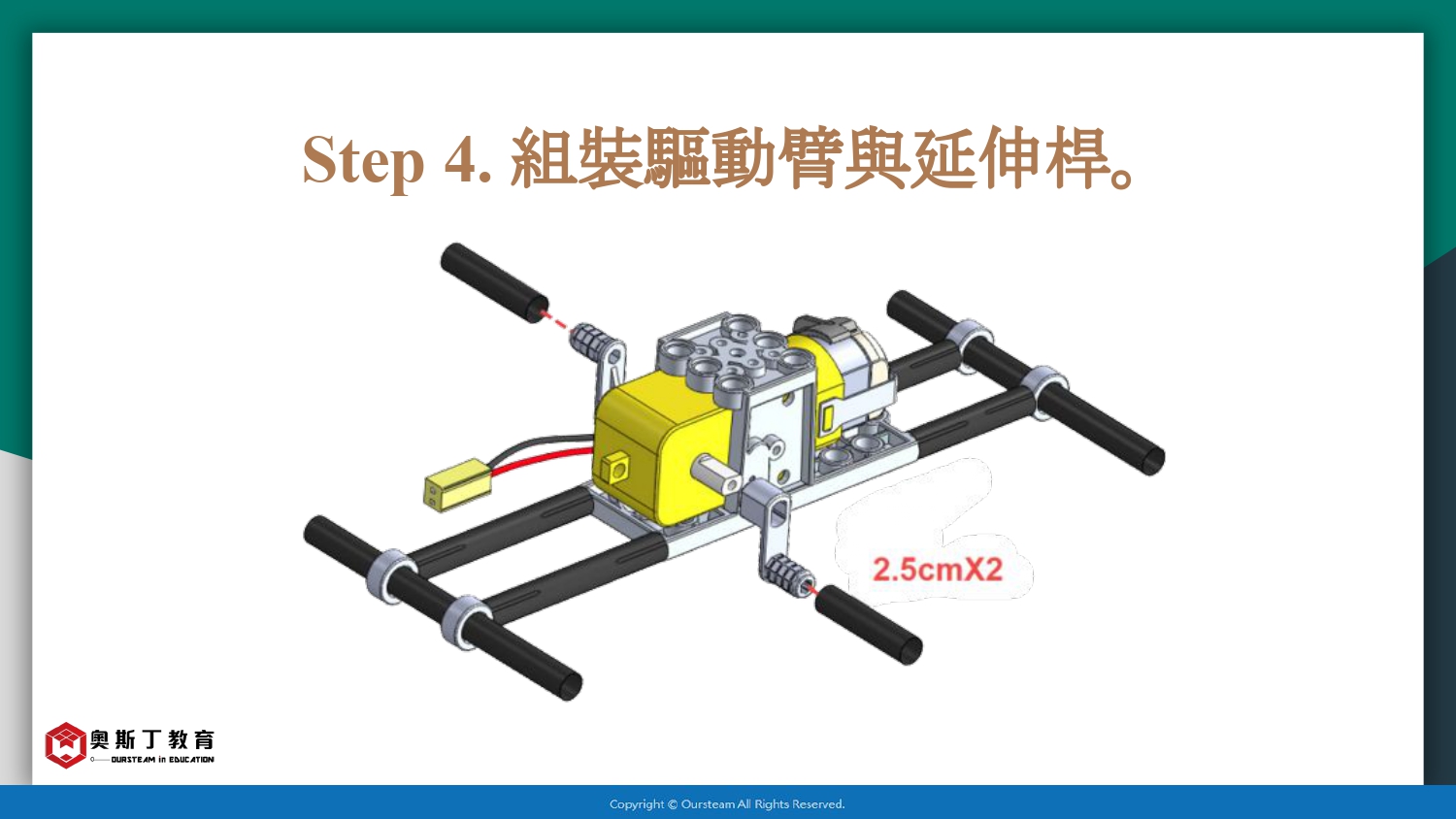
Step 3. 組裝驅動臂與延伸桿
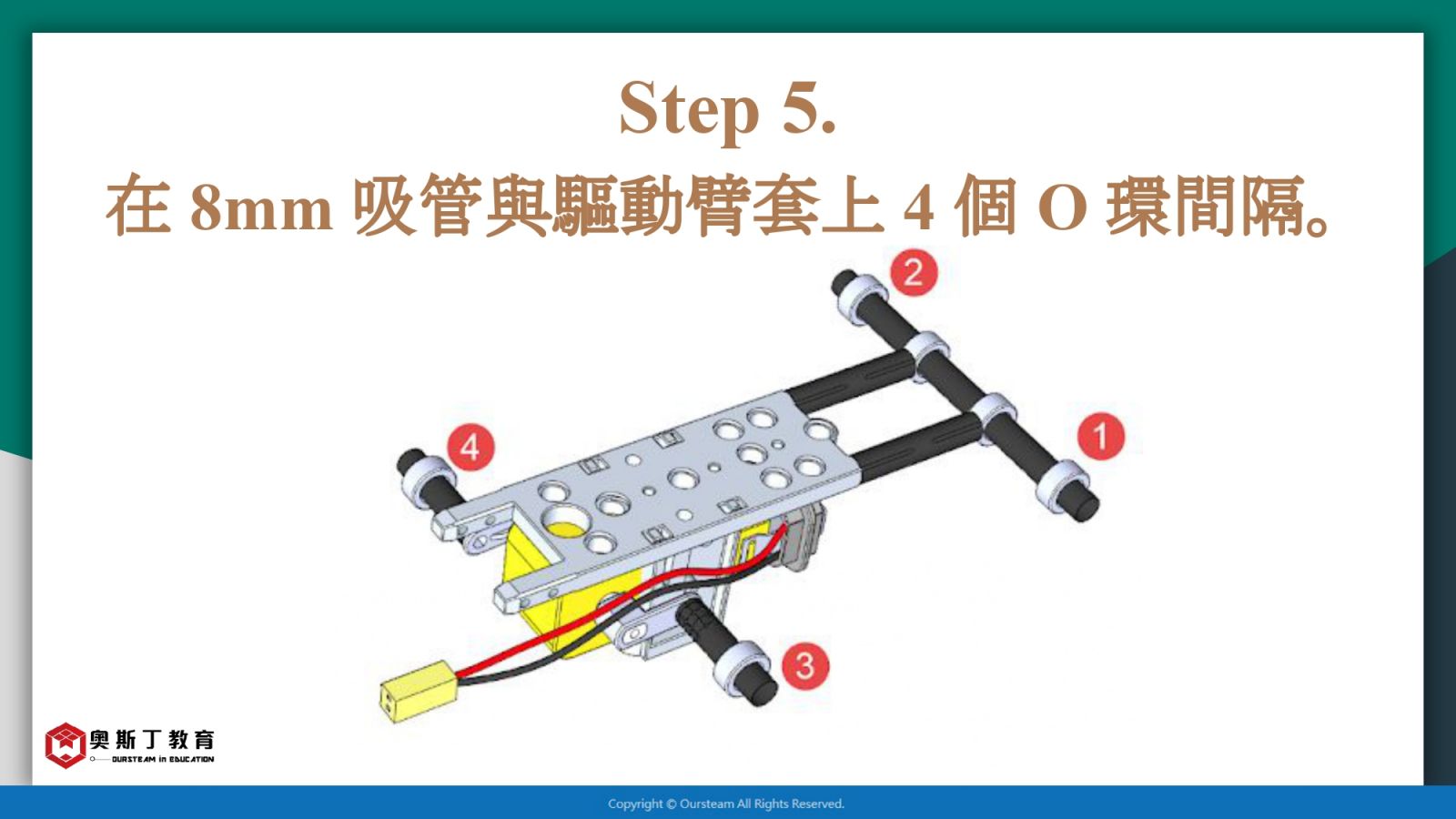
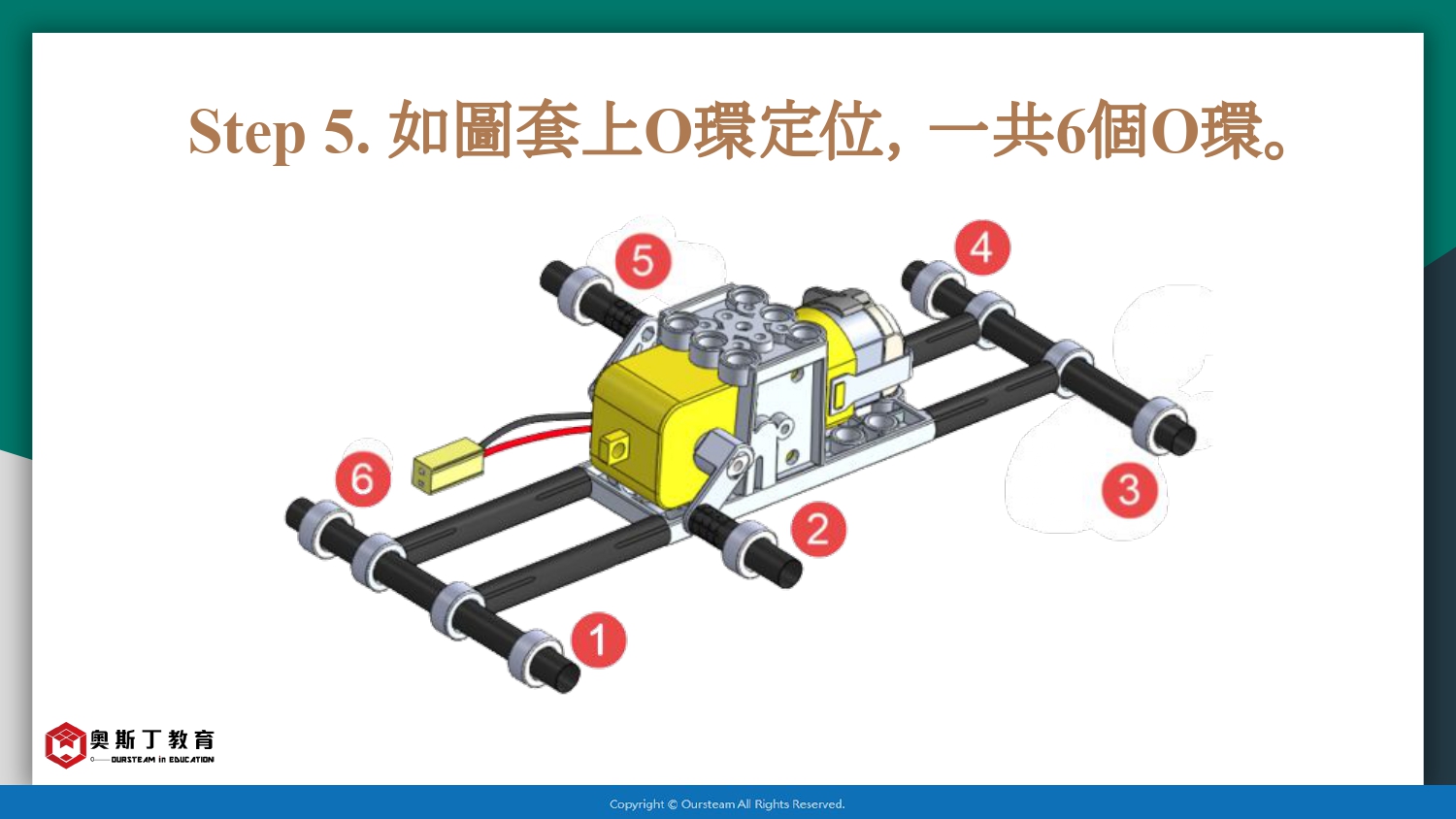
Step 4. 延伸桿上套2個O環,加強固定
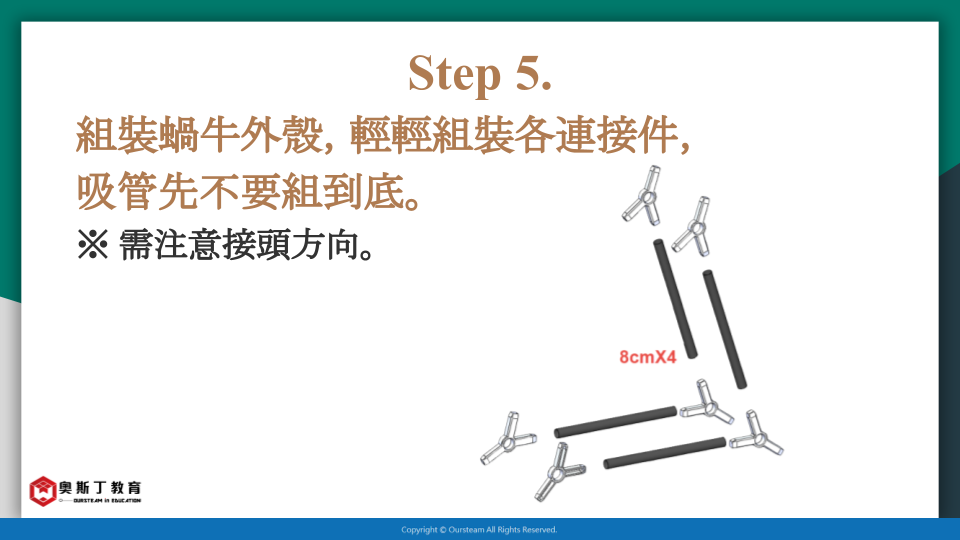
Step 5. 4叉十字接頭,兩邊要一致與驅動臂呈垂直90゚,如果會鬆滑,可以使用熱融膠固定
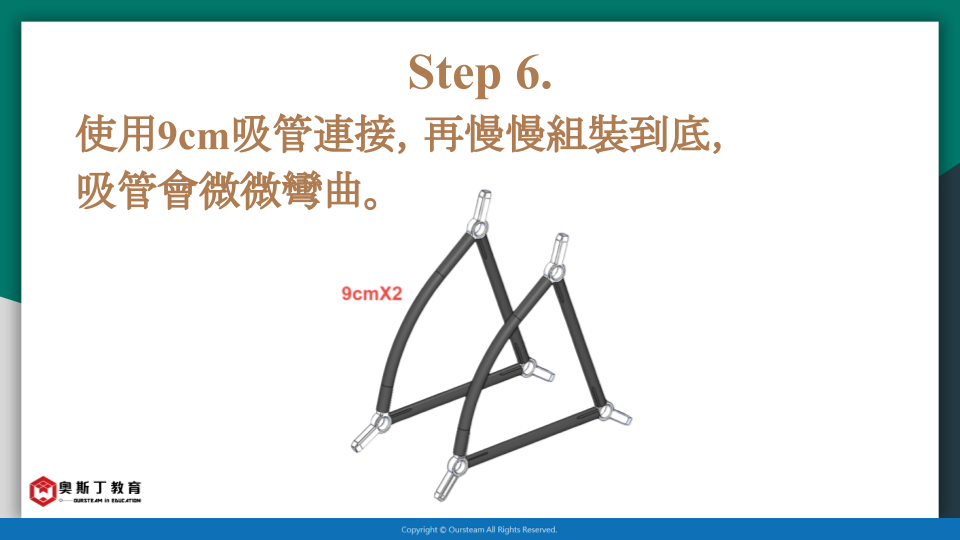
Step 6. 划動臂,末端套上O環
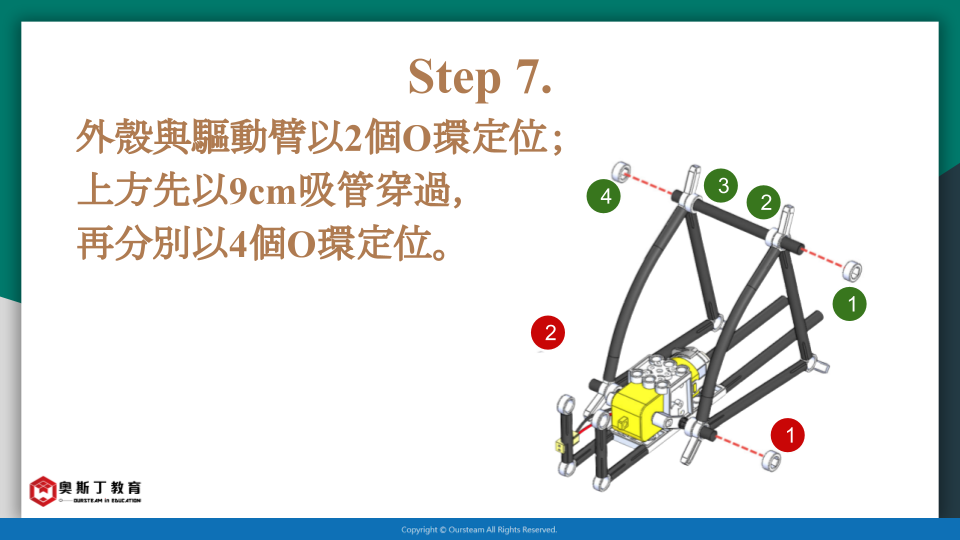
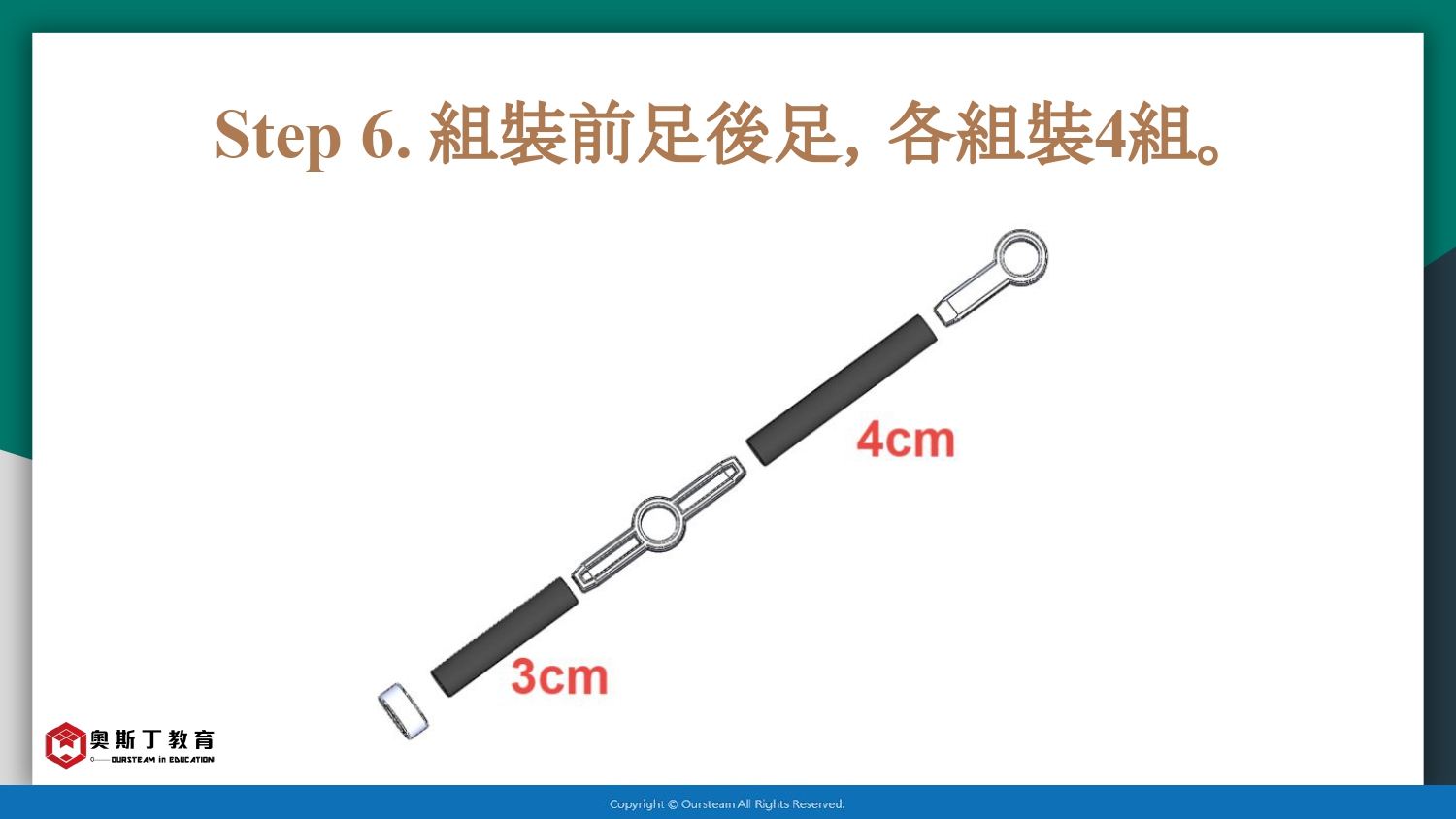
Step 7. 組裝足部
Step 8. 組裝4只滾輪,用O環定位
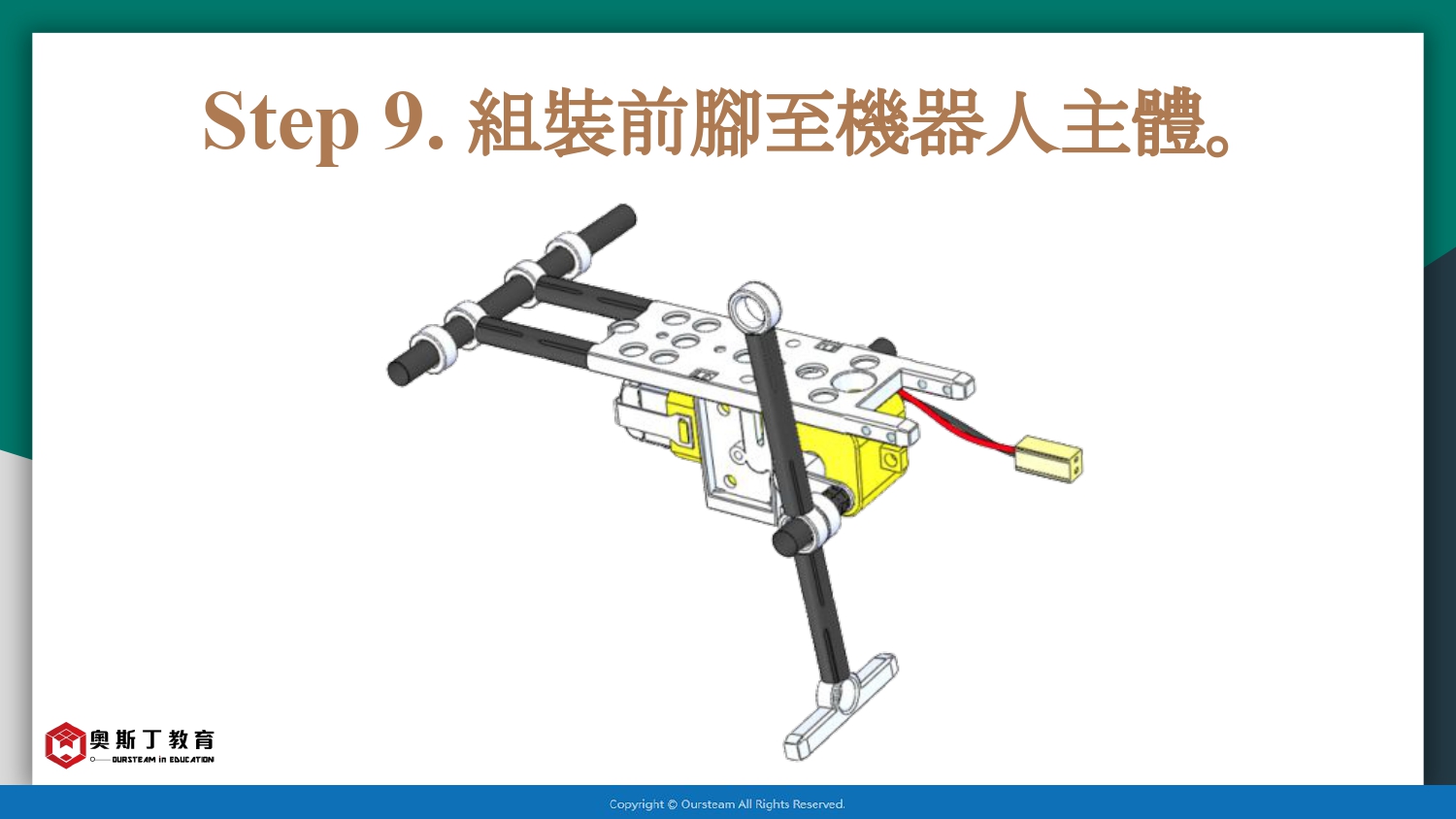
Step 9. 完成底座組裝
Step 10. 將上下座結合
實作九、尺蠖(inch worm)簡介尺蠖的運動機構為曲柄搖桿機構,靠搖桿擺動伸縮的動作來前進。
吸管機器人準備材料(不含V2主板及悟空板)
吸管與長度
組裝參考步驟
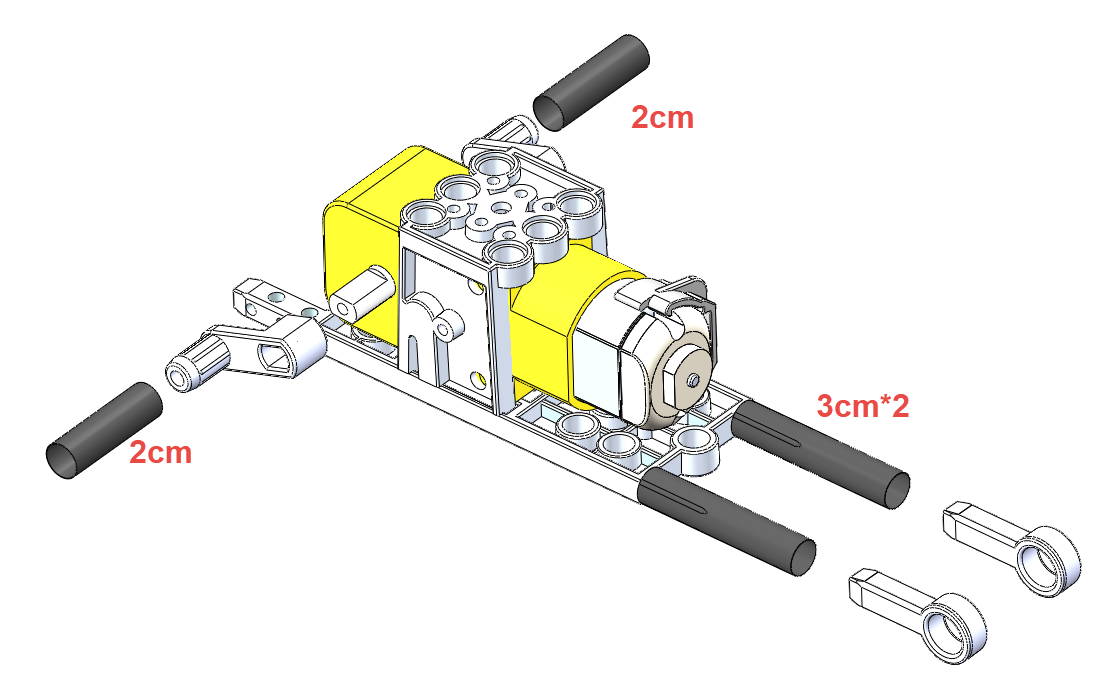
Step 1.
- 電池盒裝入AAA*2電池
- 免焊扣環連結電池盒與馬達
- 開啟電源開關,確定馬達往前方旋轉
- 蓋上上蓋。如果轉向相反,將馬達水平翻轉180度再蓋上上蓋組合即可
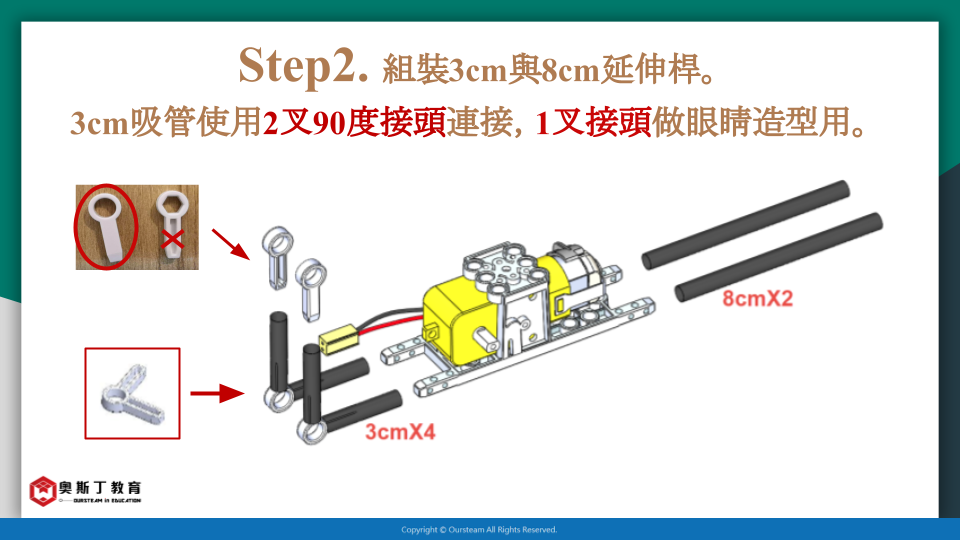
Step 2. 用4之3cm吸管,組裝前後支架(1叉接頭X2,3叉144度接頭X2)
Step 3. 組裝驅動臂
Step 4. 擺動軸4cm
Step 5. 組裝後足及橫桿5cm
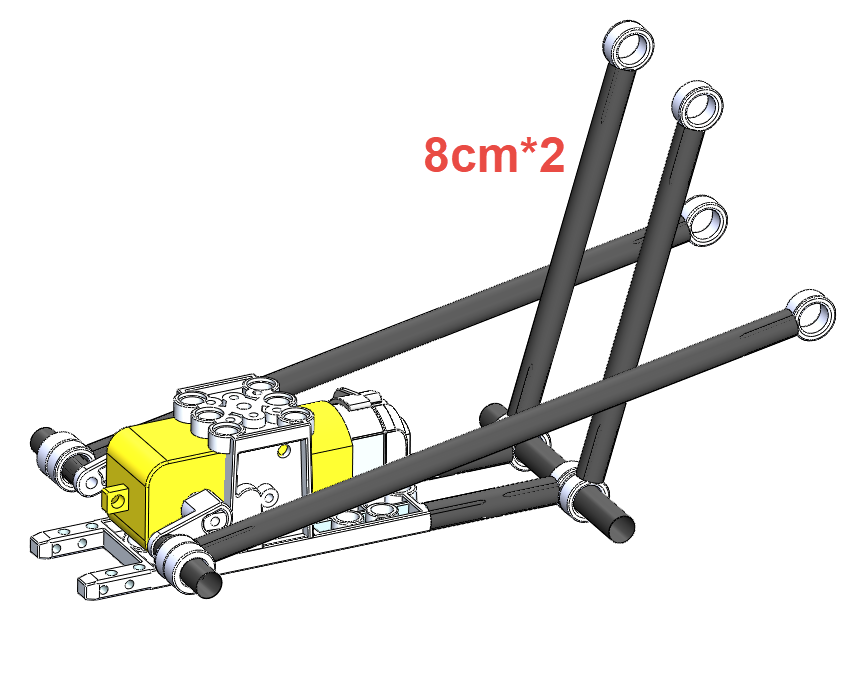
Step 6. 用8cm連桿連接前後足
Step 7. 使用端面扣釘與O環定位
Step 8. 後足加裝3叉144度接頭增加摩擦力
Step 9. 將電池盒以橡皮筋固定在後足,讓前後重量平衡
實作十、蟲蟲危機簡介這是很經典的仿生機構,運動機構為曲柄搖桿機構,靠搖桿擺動伸縮的動作來前進。
吸管機器人準備材料(不含V2主板及悟空板)
吸管與長度
組裝參考步驟
Step 1.
- 電池盒裝入AAA*2電池
- 免焊扣環連結電池盒與馬達
- 開啟電源開關,確定馬達往前方旋轉
- 蓋上上蓋。如果轉向相反,將馬達水平翻轉180度再蓋上上蓋組合即可
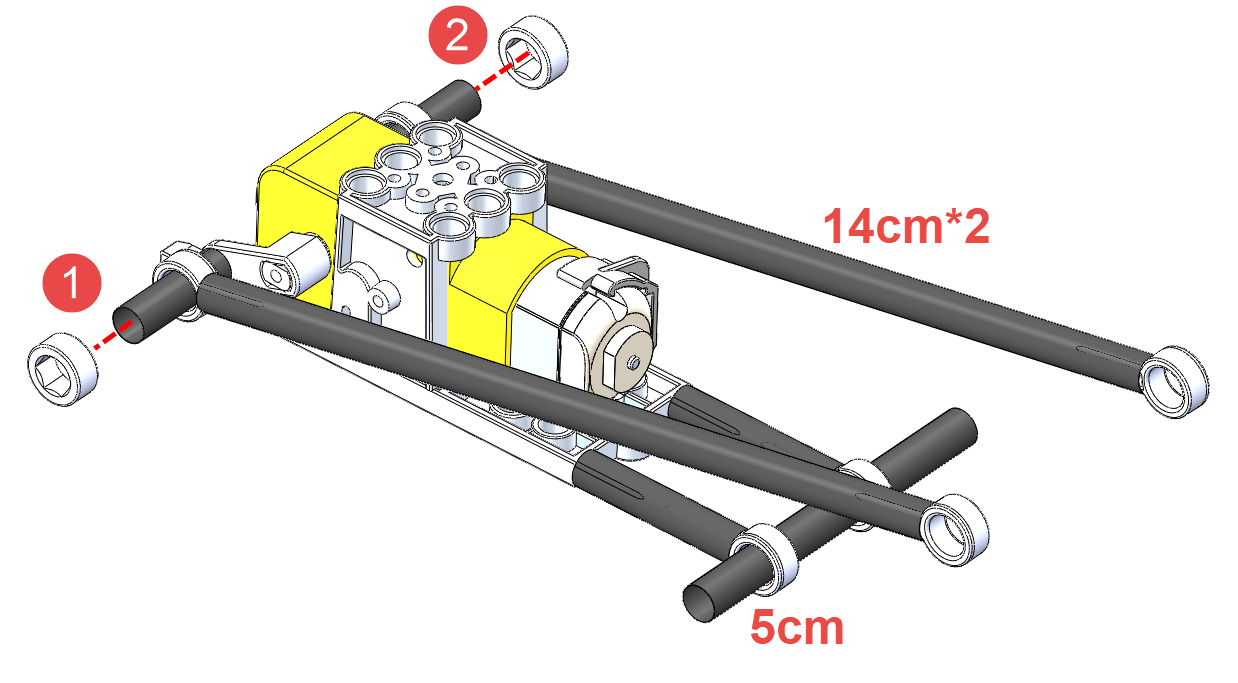
Step 2. 後支架接3cm吸管,組裝驅動臂
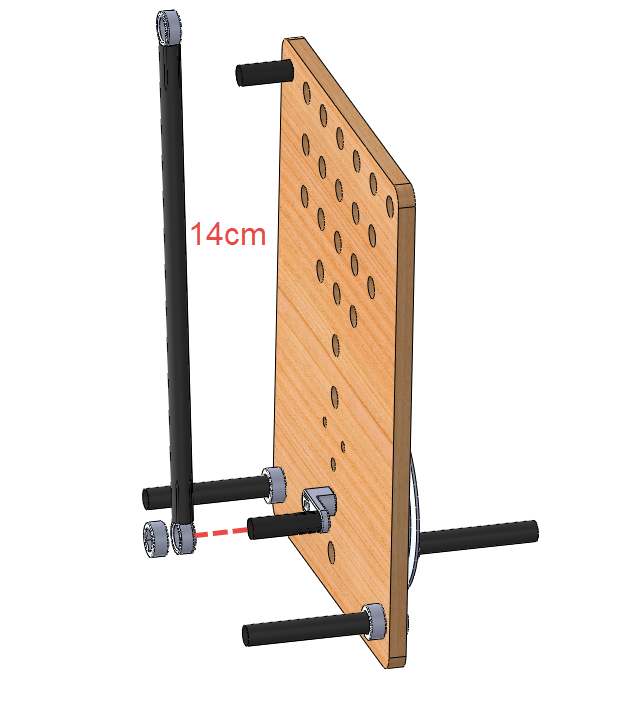
Step 3. 組裝14cm的連桿,套在驅動臂上,使用O環定位
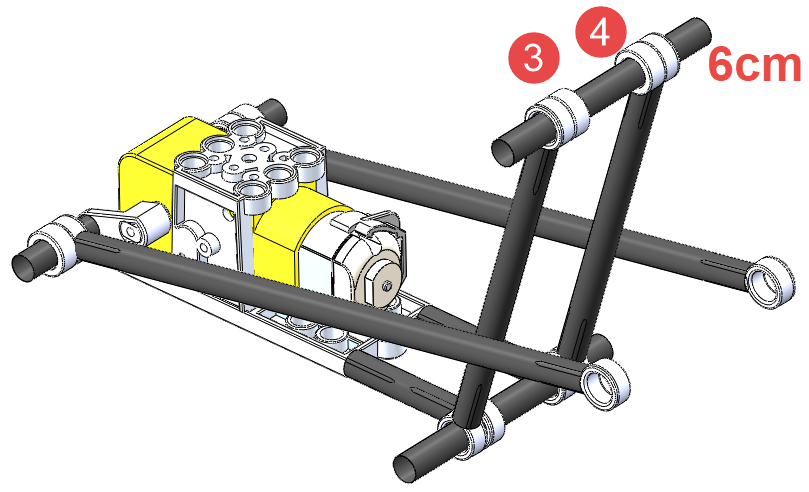
Step 4. 組裝8cm連桿
Step 5. 穿6cm橫桿,連桿間用O環定位
Step 6. 如圖組裝後半段的身體連桿
Step 7. 完成後段的身體連桿
Step 8. 使用O環定位各個橫桿
Step 9. 身體組裝完成
電池放在後半段框架中,平衡前後重量,可以使用橡皮筋固定電池盒
手動連動機構簡介我們在網路瀏覽器鍵入關鍵字:Automata,你會看到許多非常生動有趣的連動機構玩具展現,這些都是由機構連動產生的效果,機構(Mechanism)是兩個或兩個以上的機件組成,當動一機件,會連結其他機件隨之運動,各機件間作規律運動。
從想要展現的動作結果來看,有輸出旋轉、擺動型態,還有直線的往復運動等,以下是幾種可以達成的機構圖樣: | 旋轉 → 擺動 |
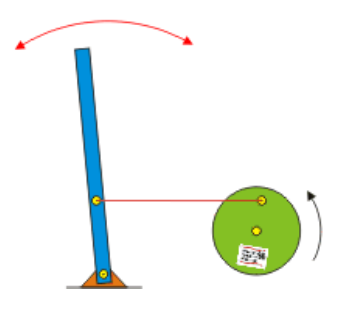 | 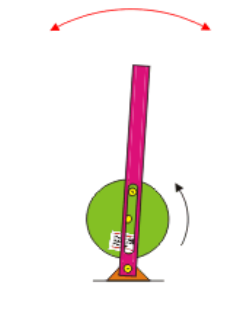 |
| 旋轉 → 上下與擺動 |
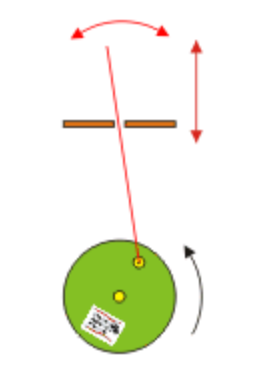 | |
| 旋轉 → 直線往復 |
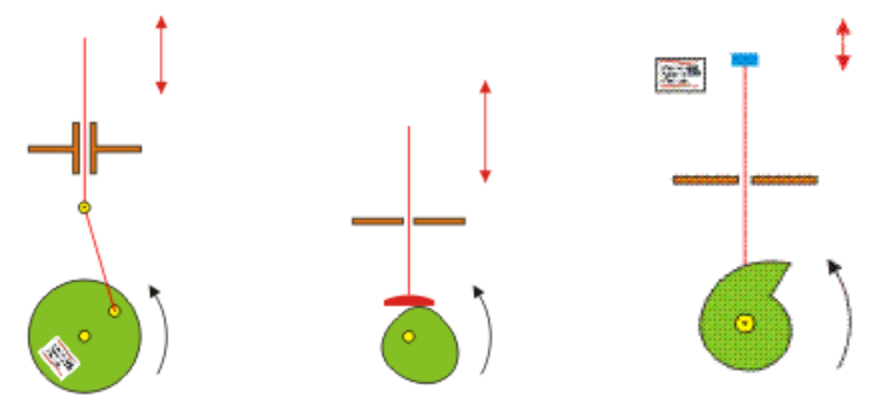 |
| 旋轉 → 空間旋轉、上下 |
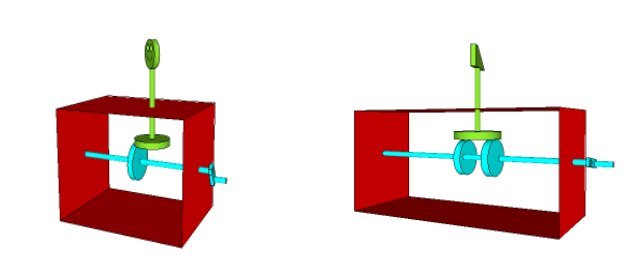 |
你想做出甚麼種類的連動機構呢?請先畫出構想圖。你需要做一個框架,然後將你設計的機構元件依照構想逐一製作與組裝,讓它能夠連動。
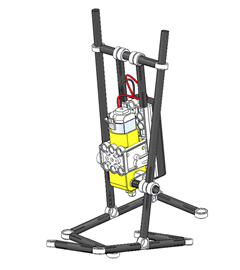
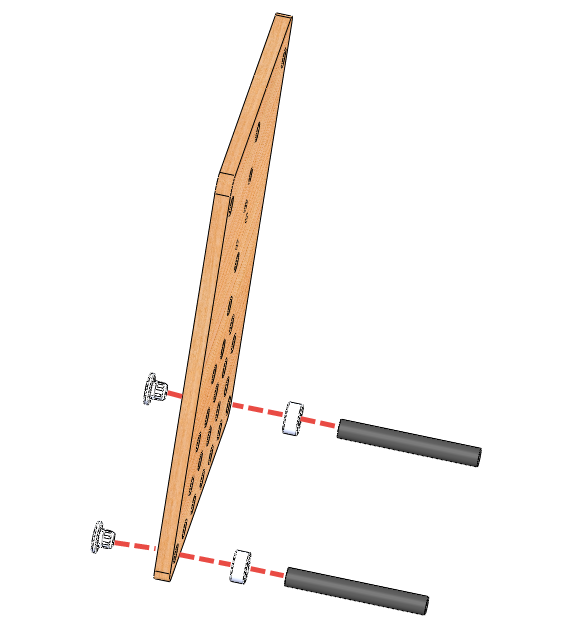
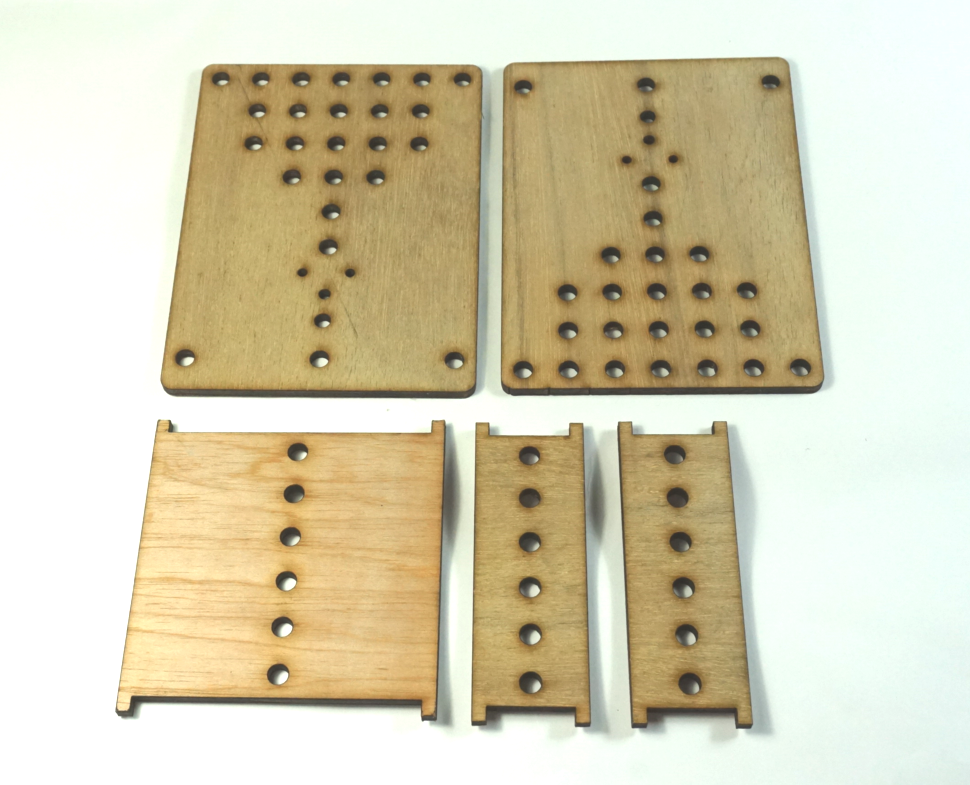
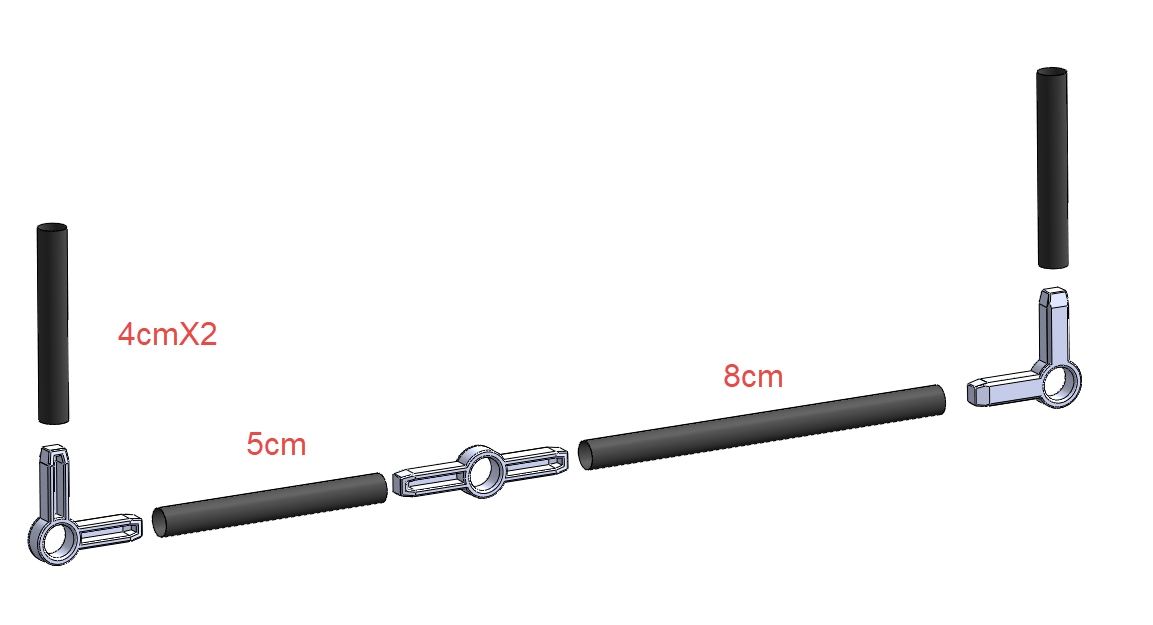
可以選擇的材料很多樣化:紙板、木材、冰棒棍、塑膠板等。以下實作範例使用吸管與連結件,設計與建造生動的連動機構。 製作底盤與框架,這是一個共用的連動機構設計,使用雷射切割5mm後的木合板製作;其實你有更多的選擇,譬如使用木板自己一設計再鑽孔組裝,或者紙盒都可以作出底盤與框架。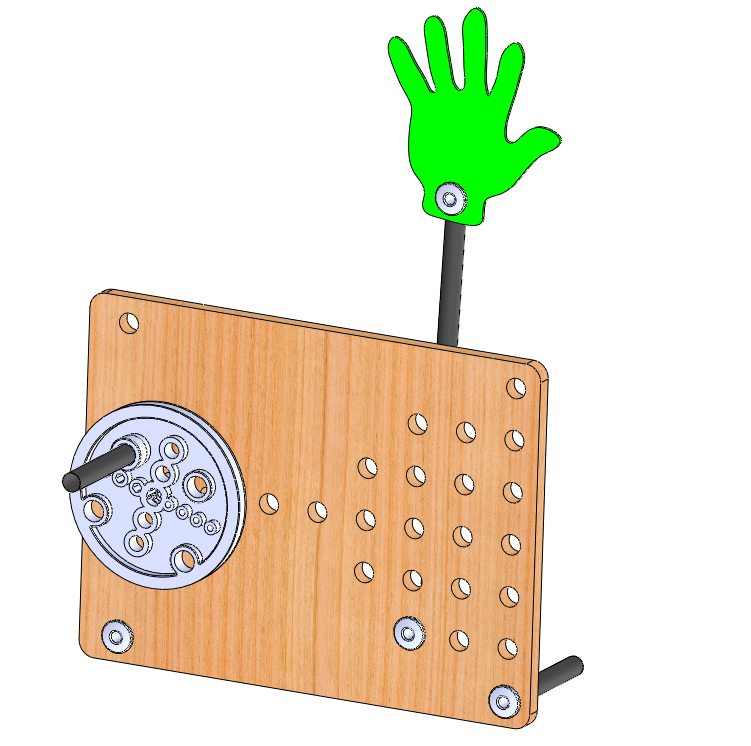
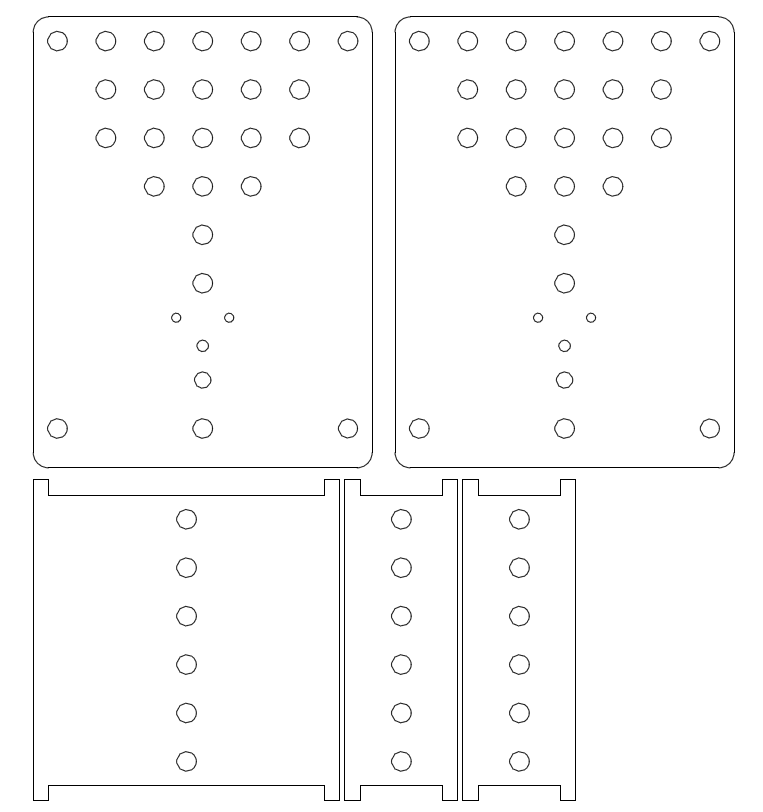
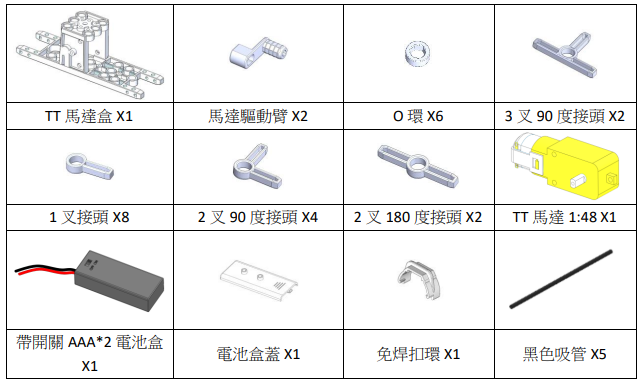
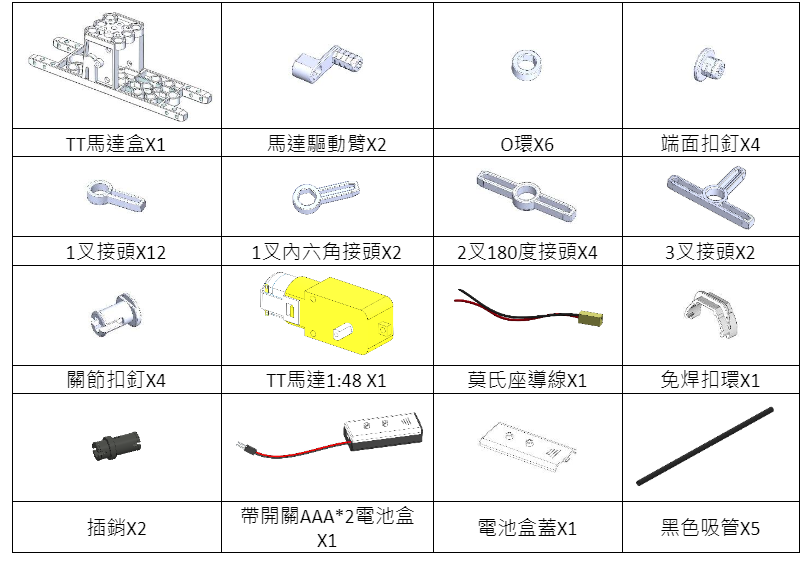
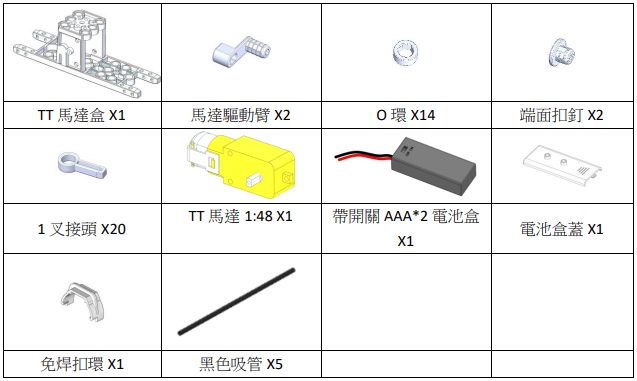
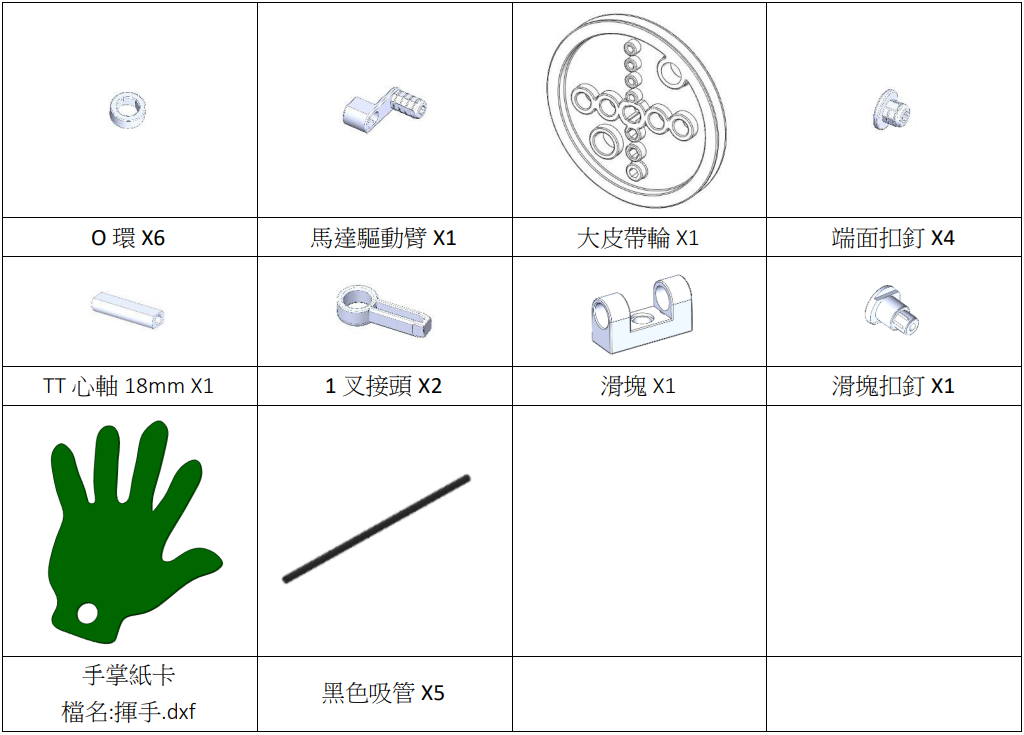
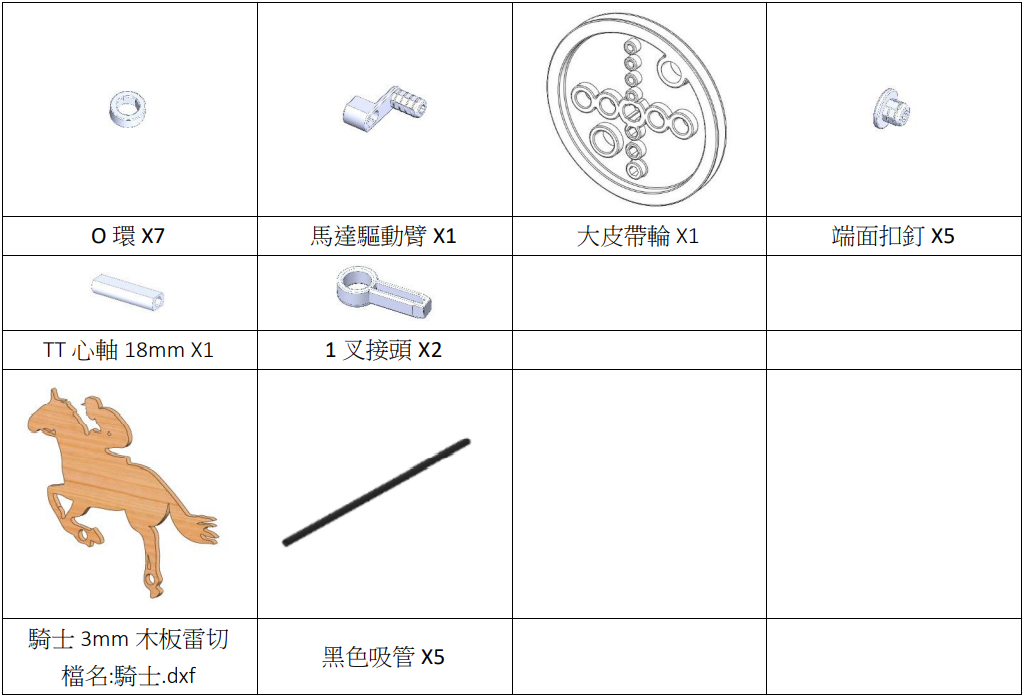
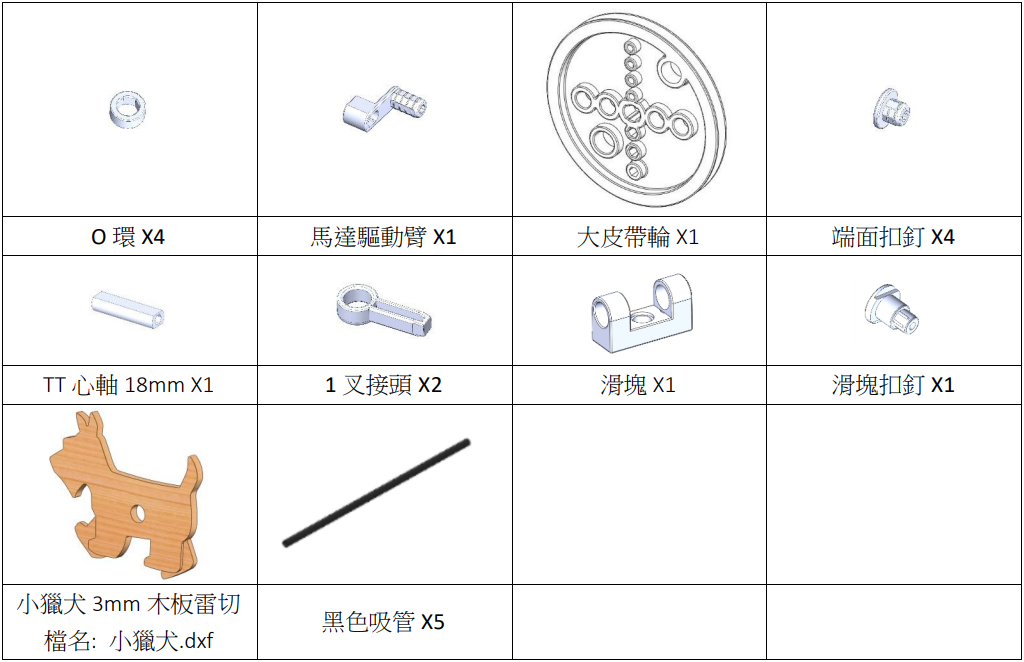
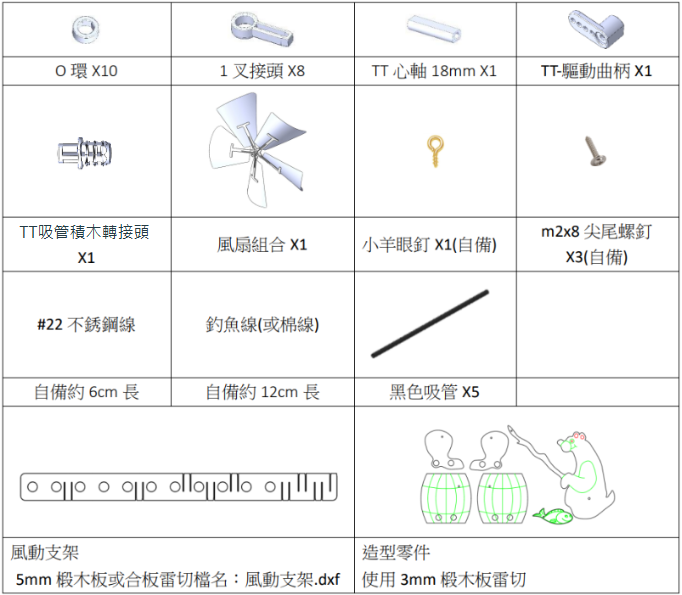
準備材料
組裝參考步驟
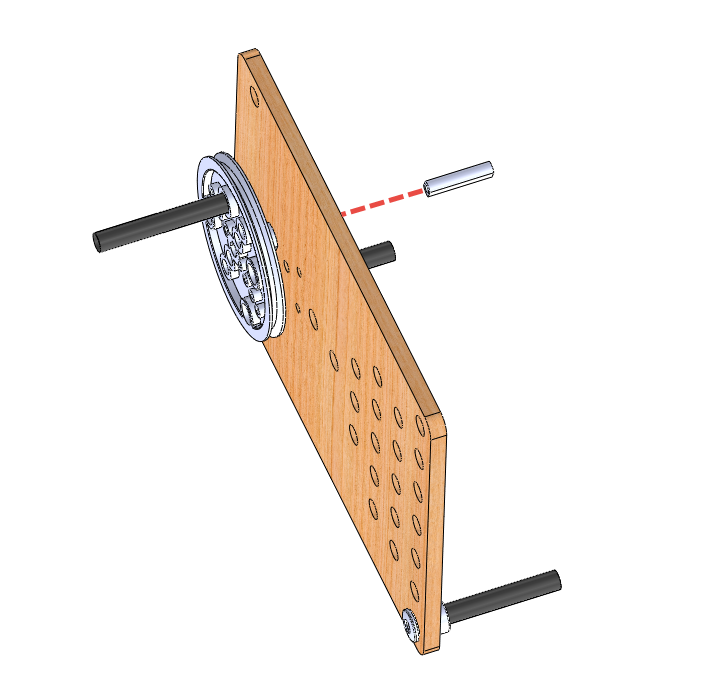
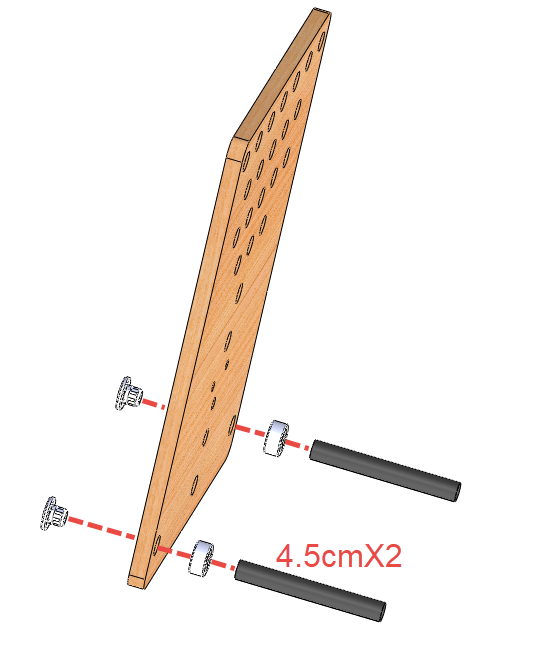
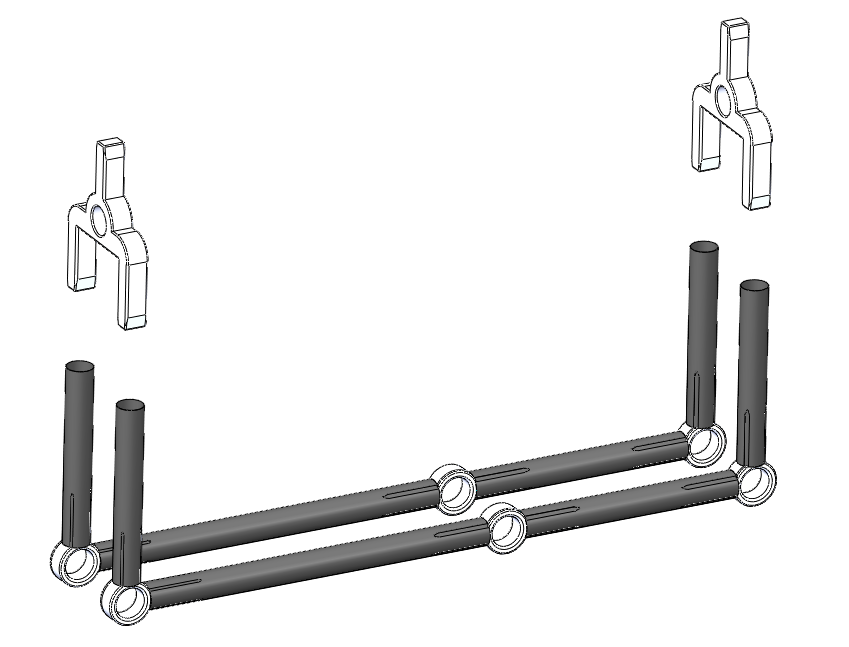
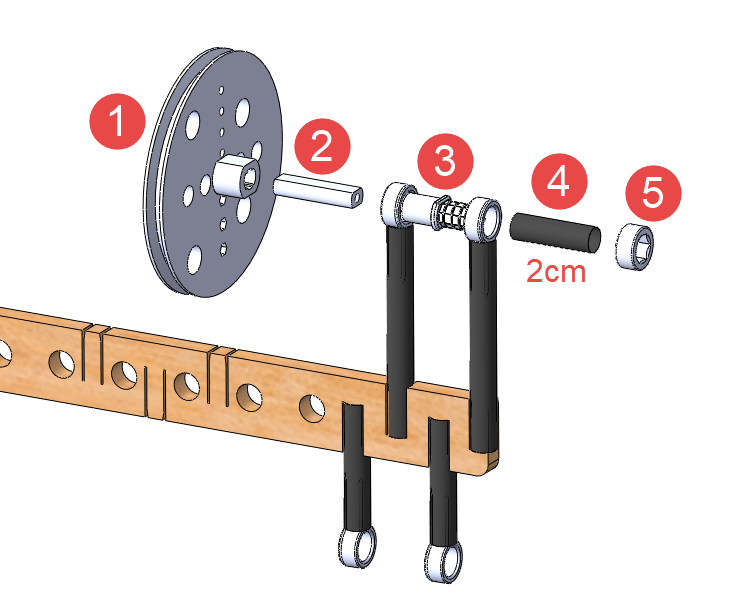
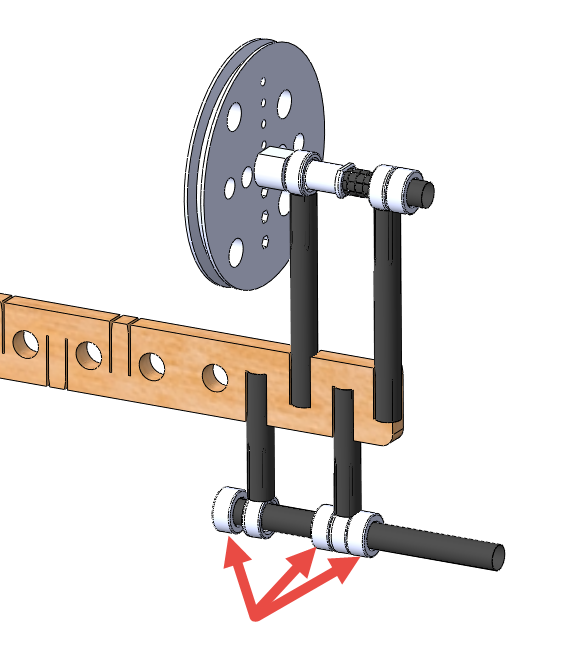
Step 1. 組裝底盤
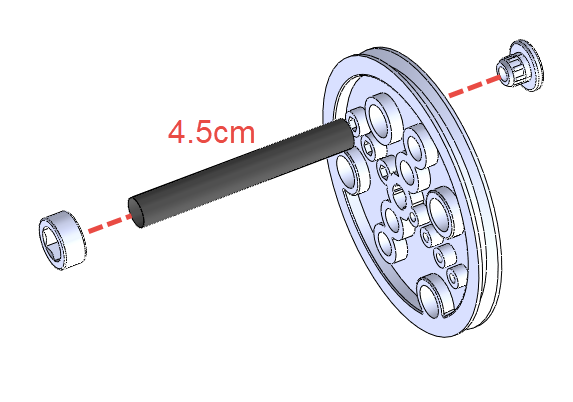
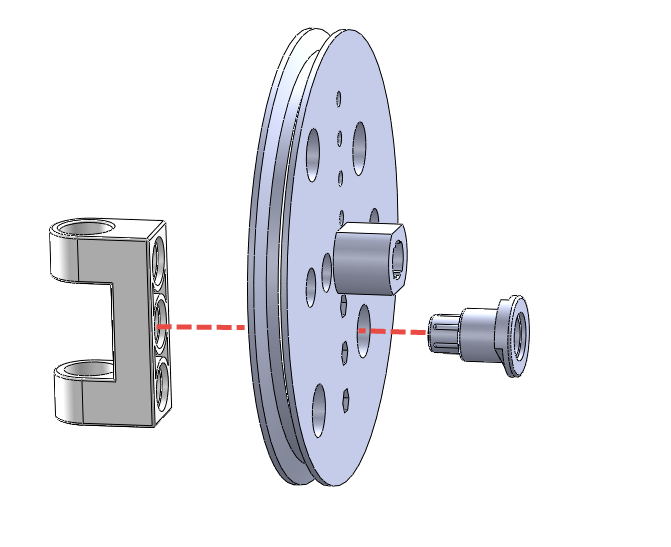
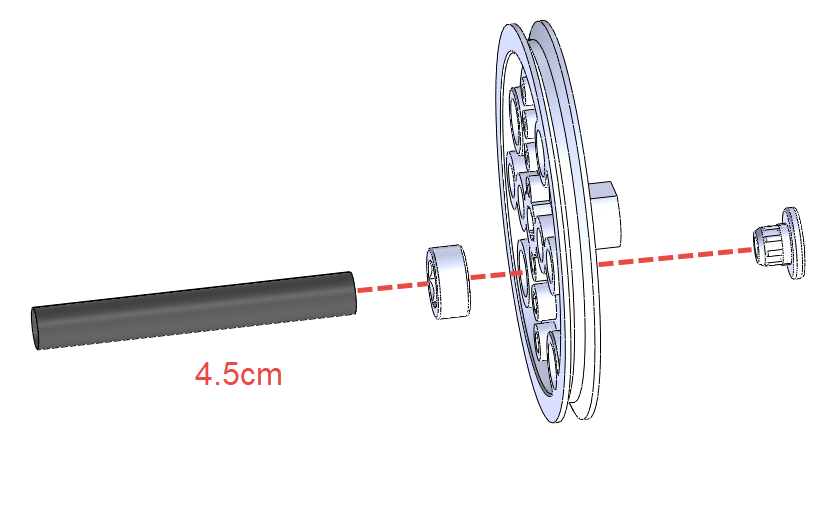
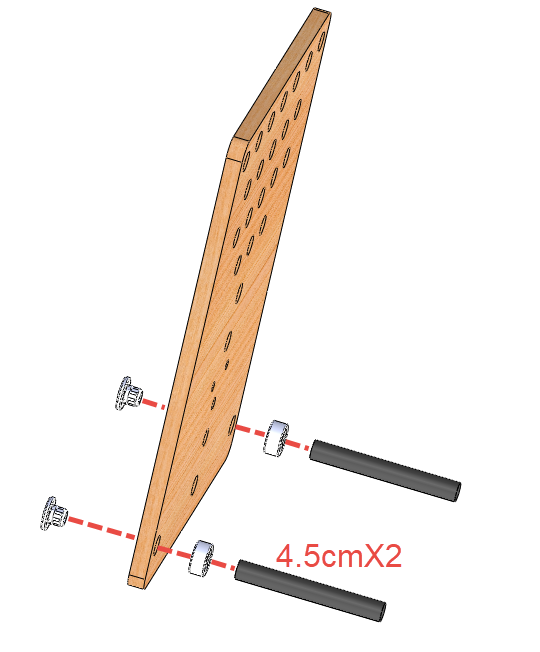
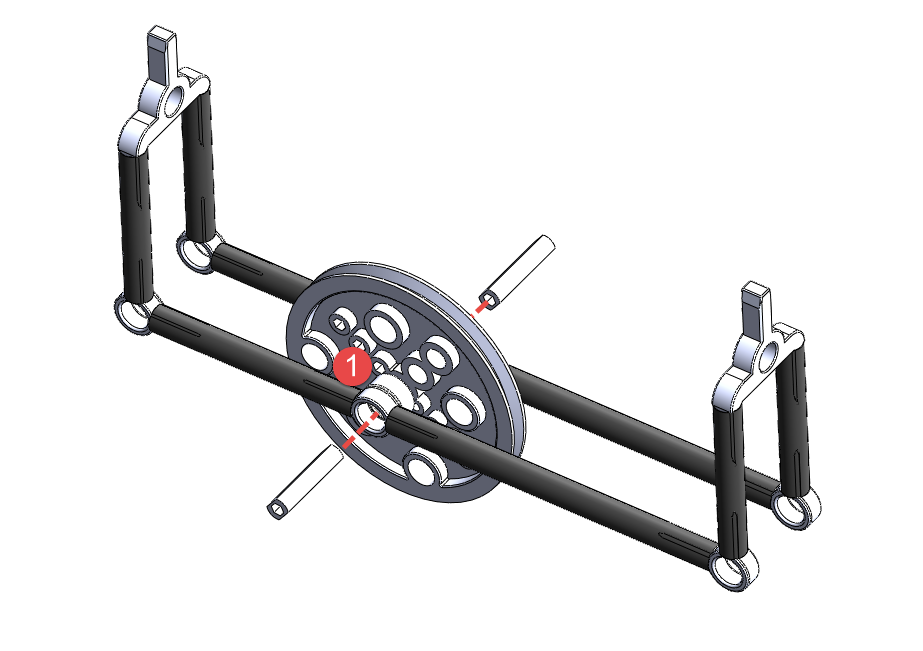
Step 2. 組裝驅動盤
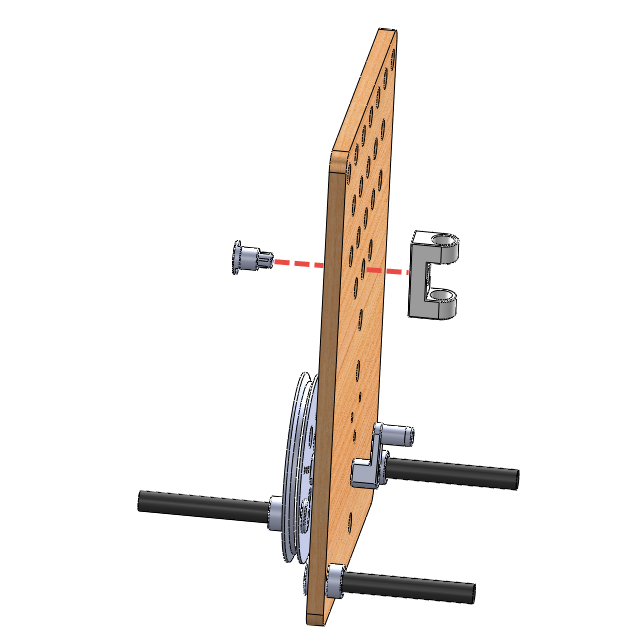
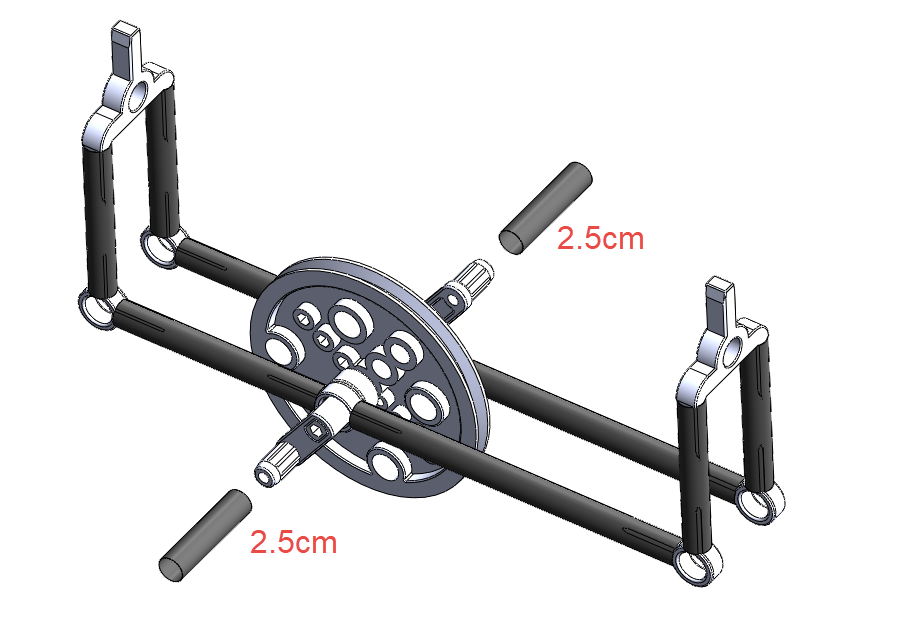
Step 3. 以TT心軸穿過
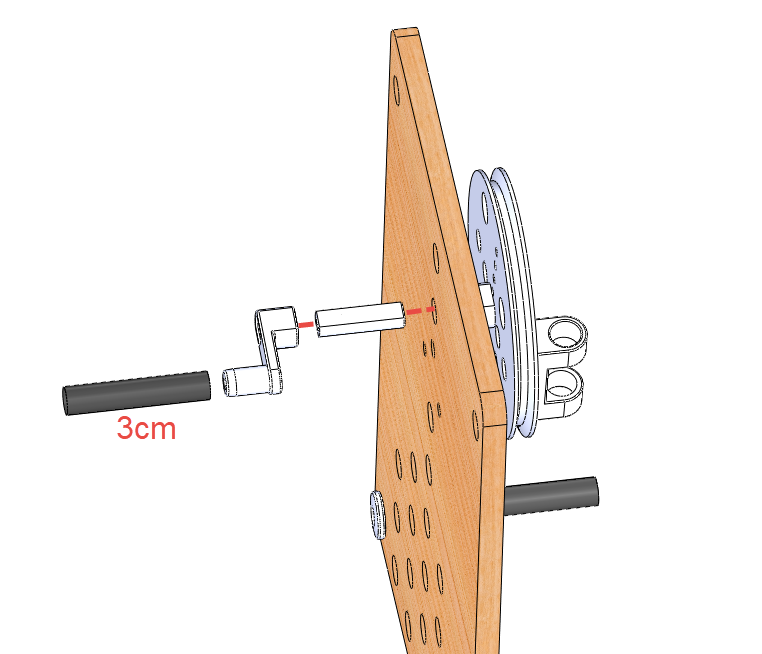
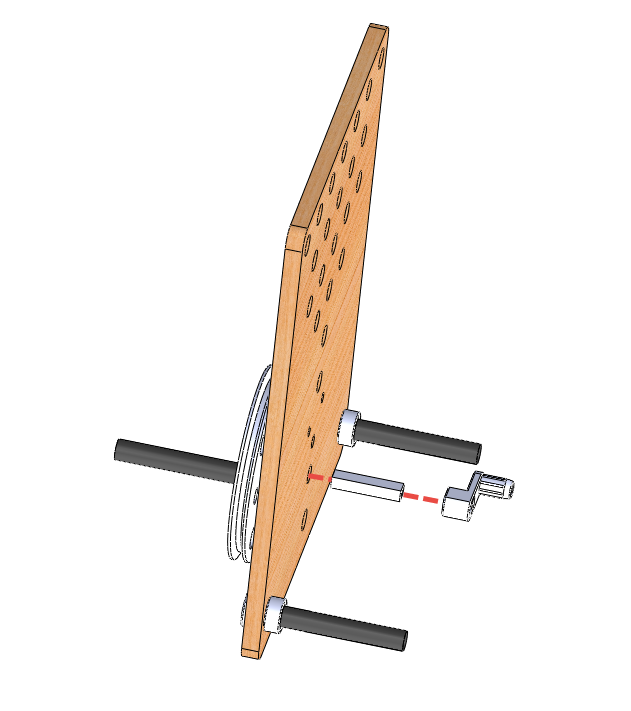
Step 4. 驅動臂組裝
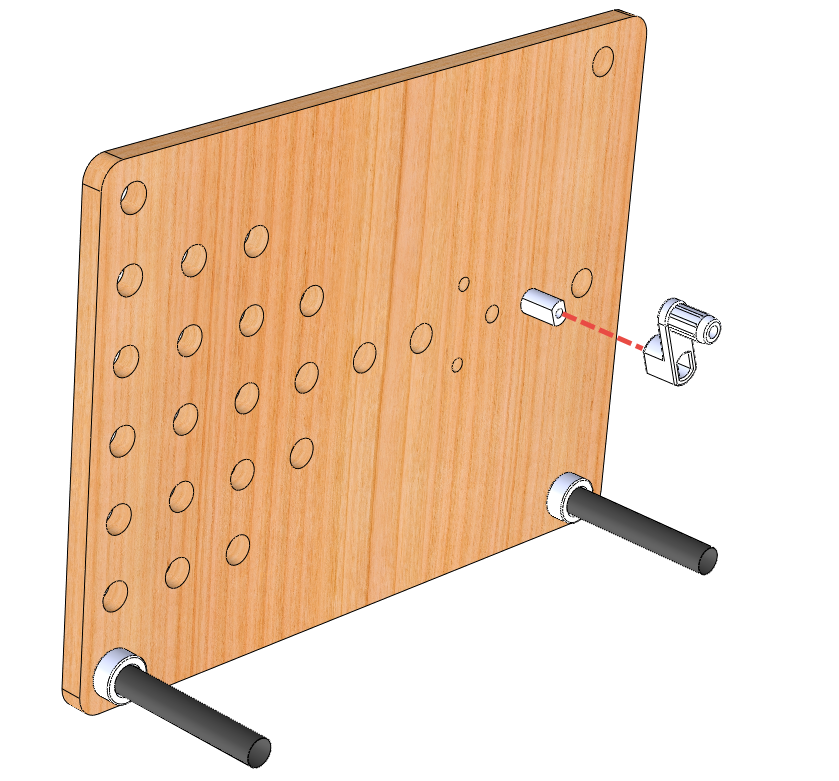
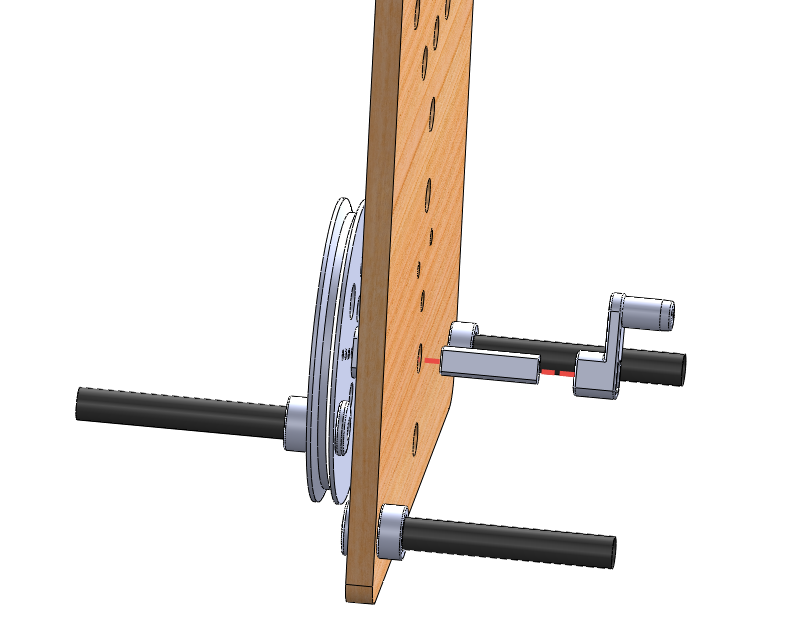
Step 5. 組裝旋轉支點與固定支點
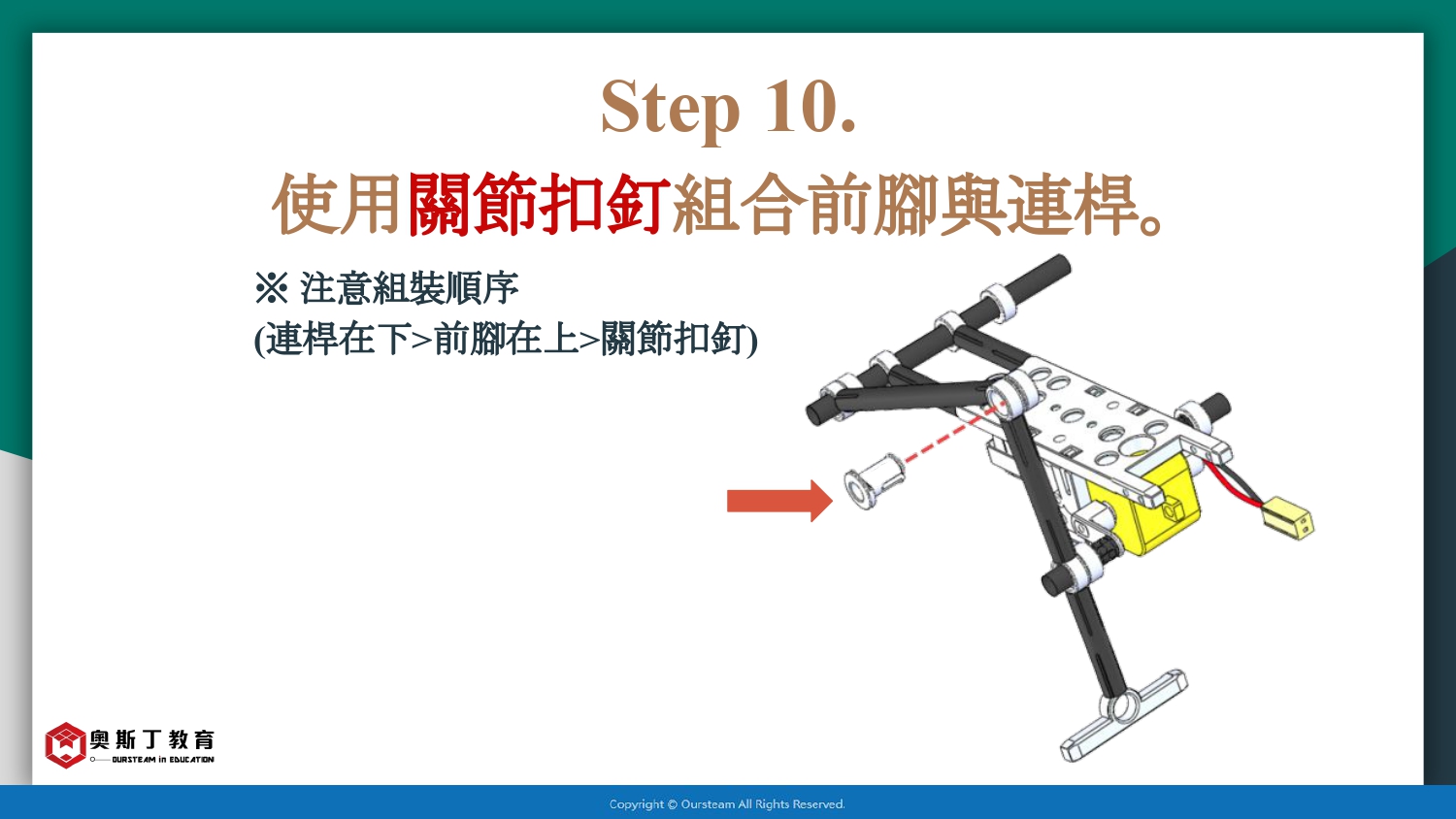
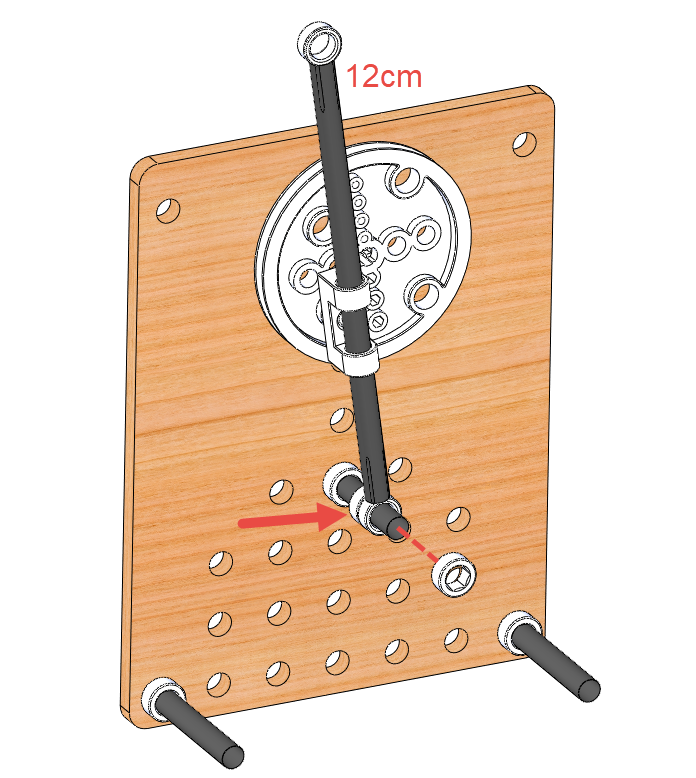
Step 6. 組裝浮桿與搖桿,中間用關節扣釘組裝連接
Step 7. 使用環固定連桿組位置,並且能順暢轉動
Step 8. 雙面膠黏貼裝上紙卡,完成
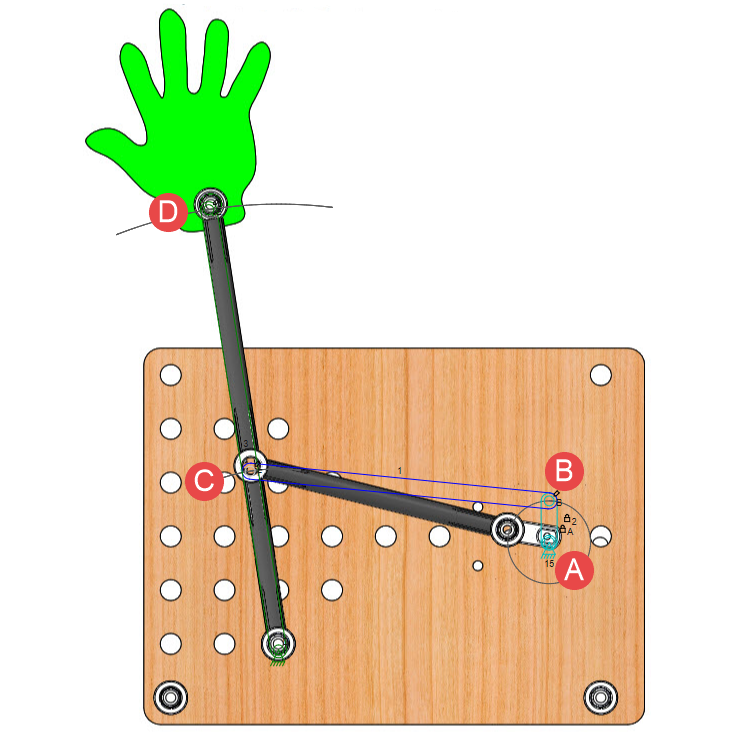
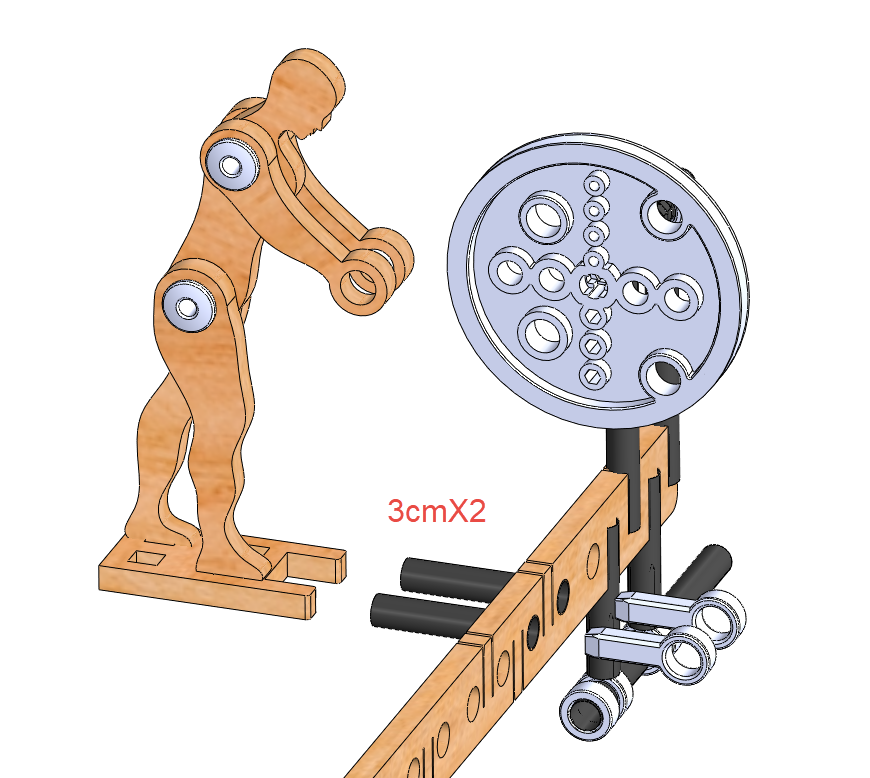
轉動把手,觀察機構的動作。從背面觀察,曲柄(驅動臂)做旋轉運動,C點與D點做擺動,這個稱為曲柄搖桿機構。
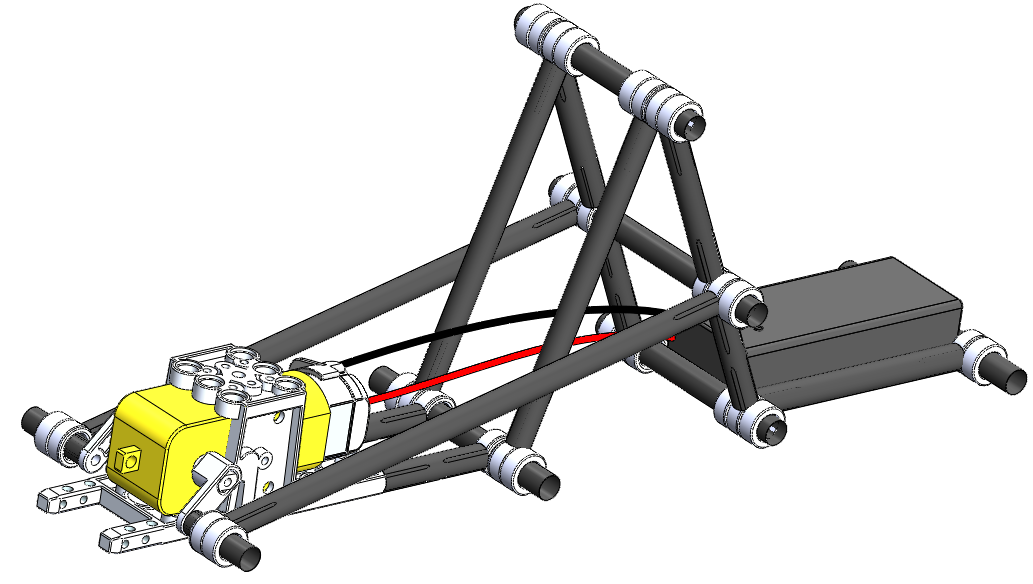
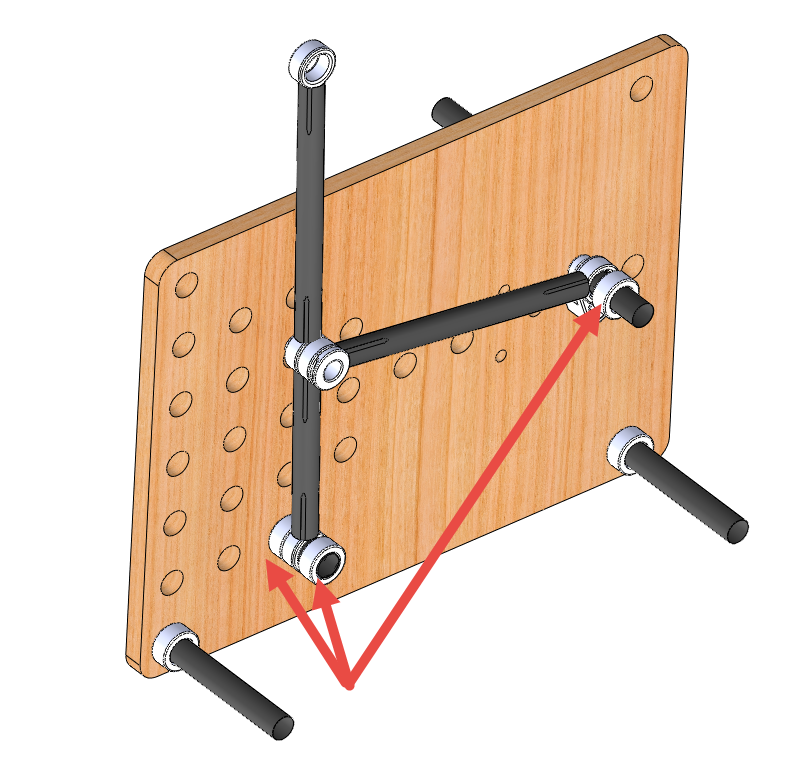
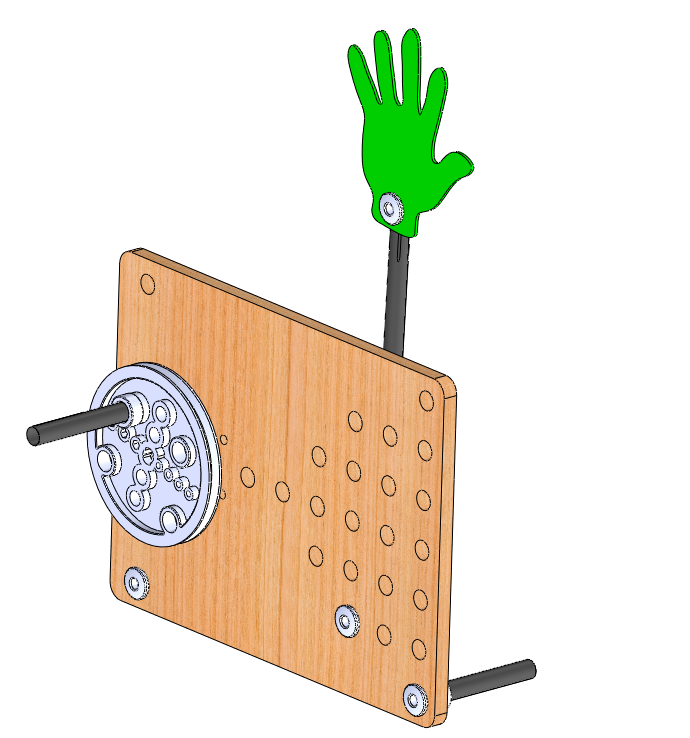
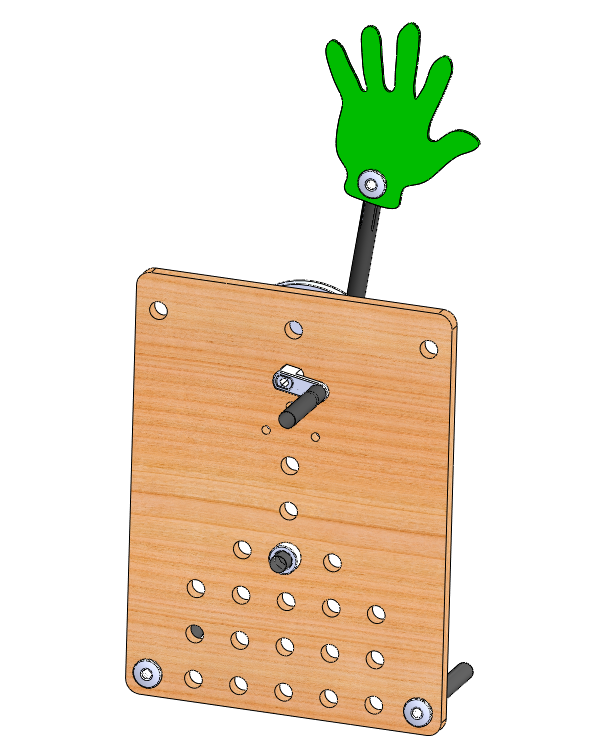
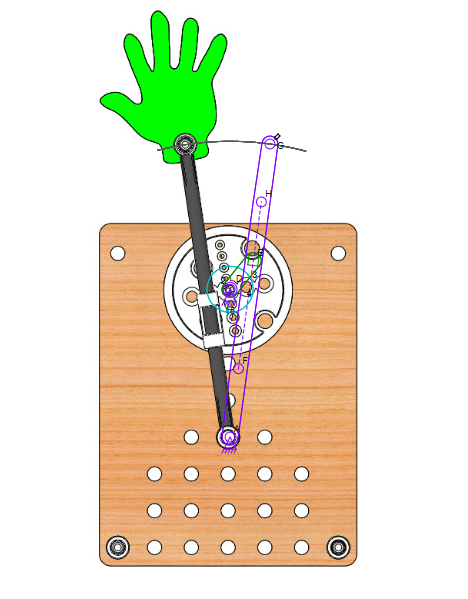
手動機構 - 揮揮手_2我們從這單元介紹的動作方式圖例,可以發現還有另一種機構可以達成:旋轉→擺動,它使用了滑塊,利用滑塊帶動搖桿擺動。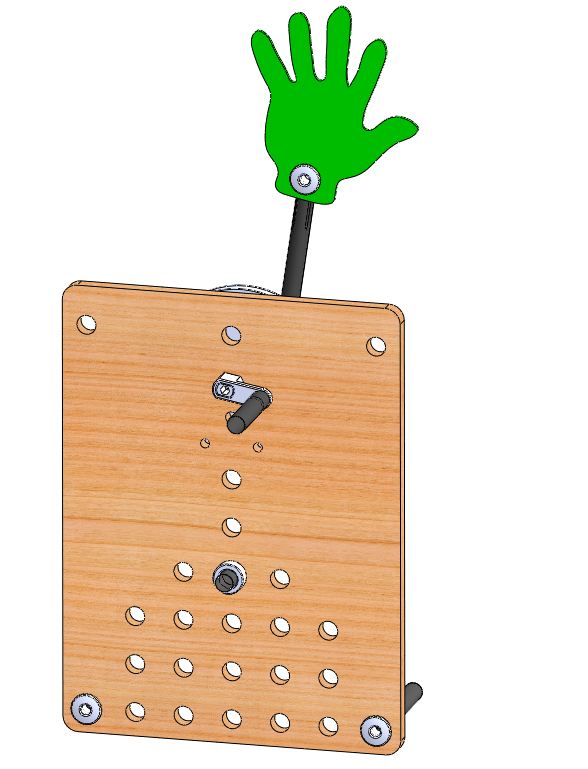
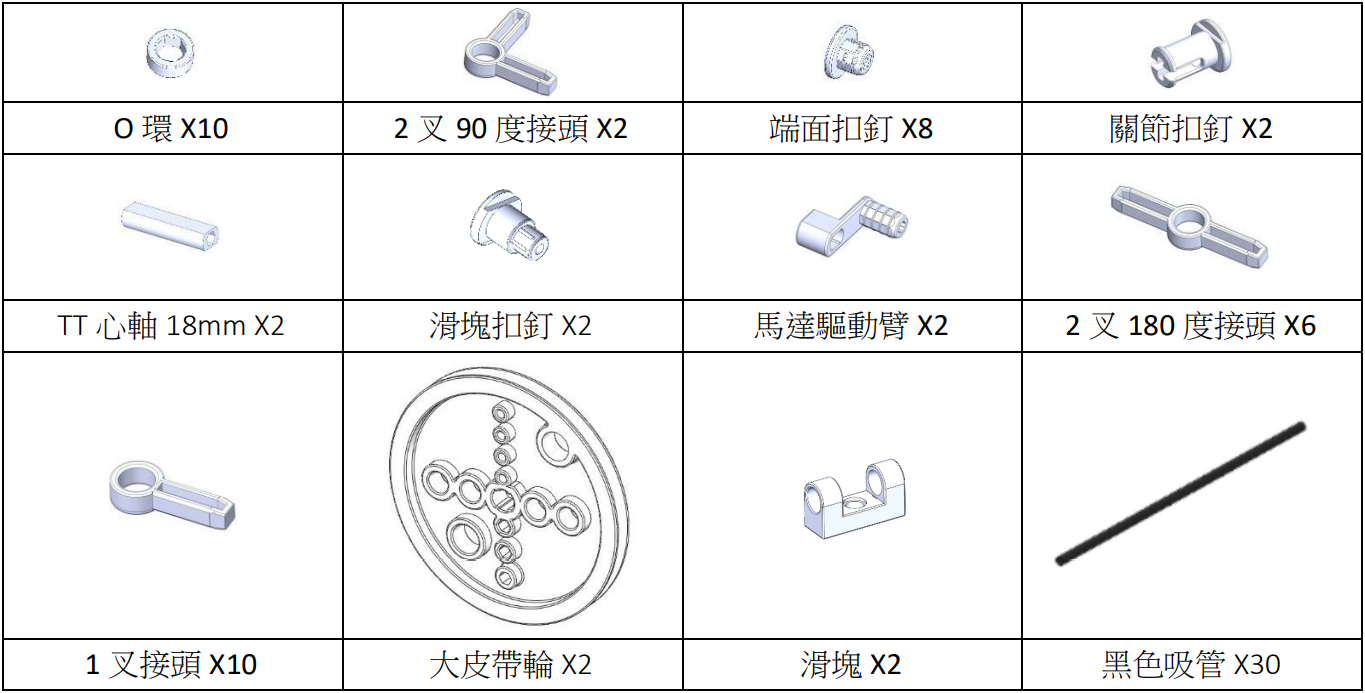
準備材料
組裝參考步驟
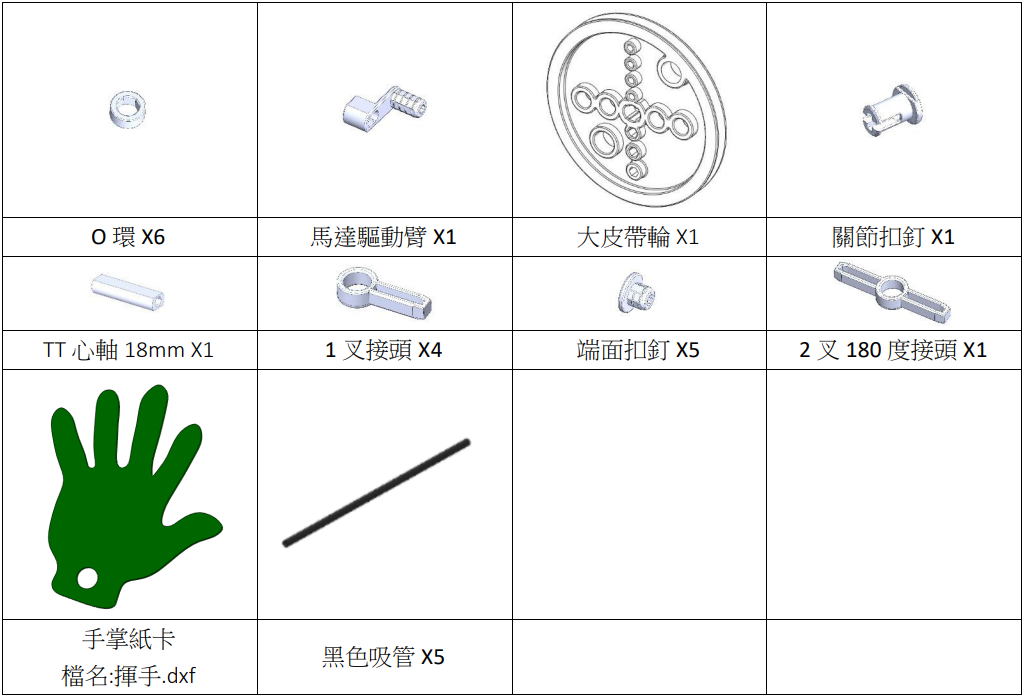
Step 1. 組裝底盤
Step 2. 將滑塊以滑塊扣釘與驅動盤組合
Step 3. 以TT心軸穿過連接驅動臂,3mm吸管做把手
Step 4. 4.5mm吸管組裝固定支點
Step 5. 在4.5cm軸上套上O環定位,12mm吸管與2支1叉接頭組裝搖桿,穿過滑塊與固定支點組裝,再用O環定位
Step 6. 裝上紙卡,完成
轉動把手,觀察機構的動作。從背面觀察,滑塊在大皮帶輪做迴轉運動,搖桿被滑塊帶動做擺動,這稱為迴轉滑塊曲柄機構
延伸思考:請將傳動大皮帶輪的心軸,往下移動一孔組裝;轉動把手,觀察機構動手有甚麼改變?
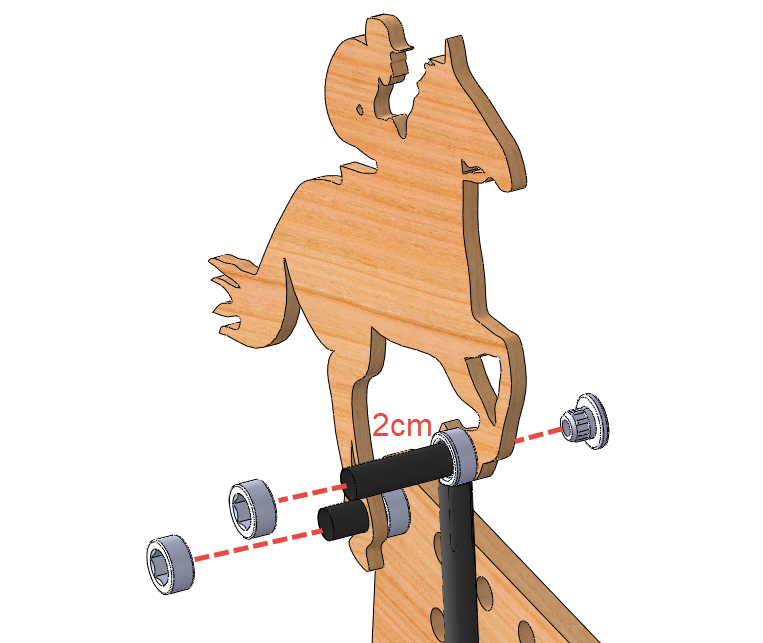
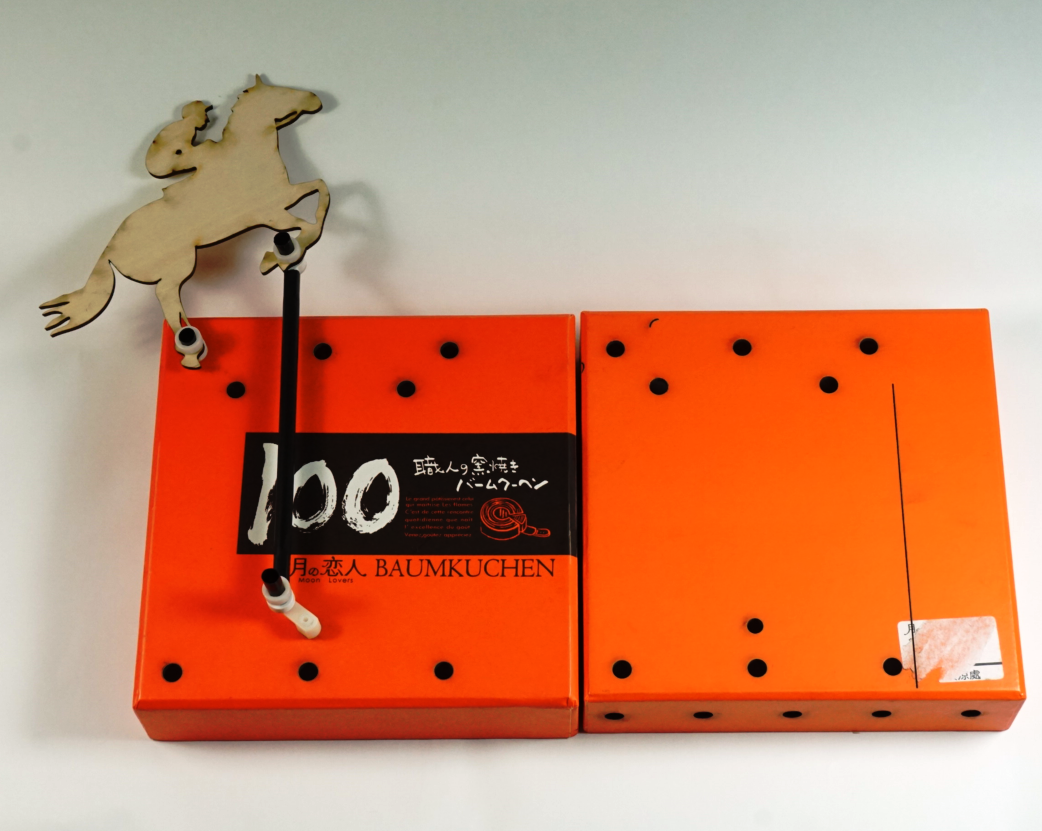
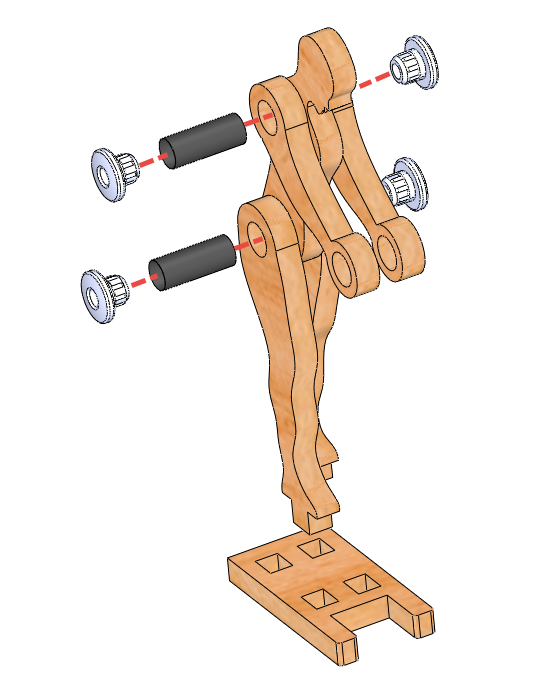
手動機構 - 小騎士應用吸管做機構零件,駿馬的身體造型,相當於駿馬前後的腳中間的等效連桿。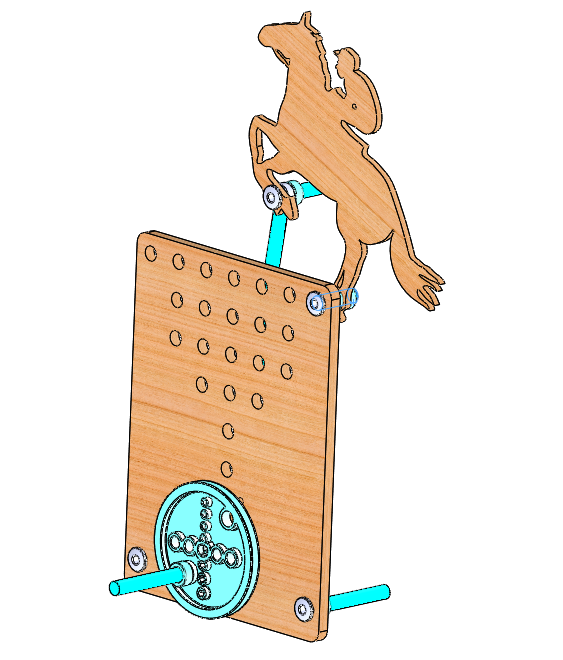
準備材料 組裝參考步驟
Step 1. 組裝底盤
Step 2. 組裝驅動盤
Step 3. 以TT心軸穿過軸孔固定驅動臂與轉盤
Step 4. 以2mm吸管做固定支點與旋轉支點
Step 5. 以14mm吸管組裝浮桿,並用O環定位
Step 6. 用2mm吸管與端面扣釘,將騎士造型連接,並且用O環定位
Step 7. 完成組裝;轉動把手,觀察機構的動作
從背面觀察,曲柄(驅動臂)做旋轉運動,C點與D點之間稱為這騎士造型的等效連桿做擺動,這個機構是曲柄搖桿機構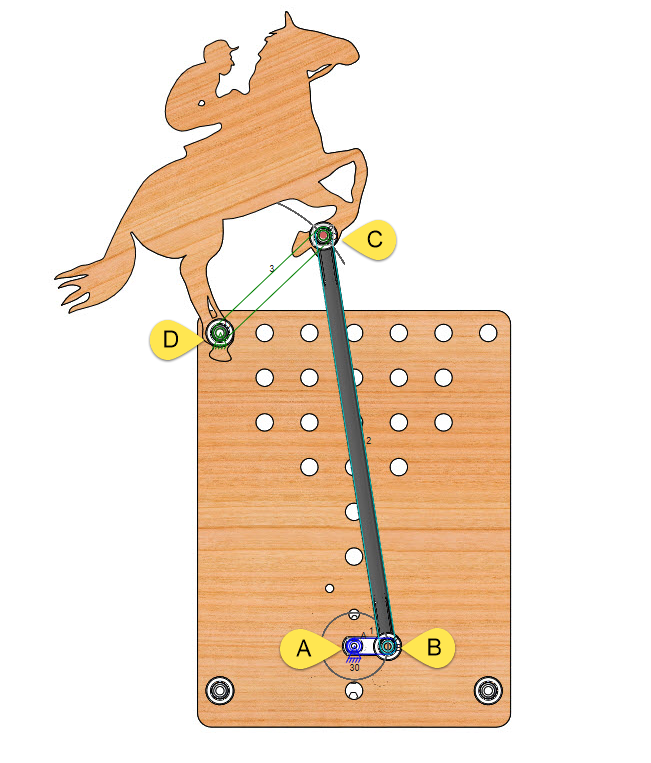
手動機構 - 小獵犬讓我們做一個機構,讓小獵犬快樂的蹦跳!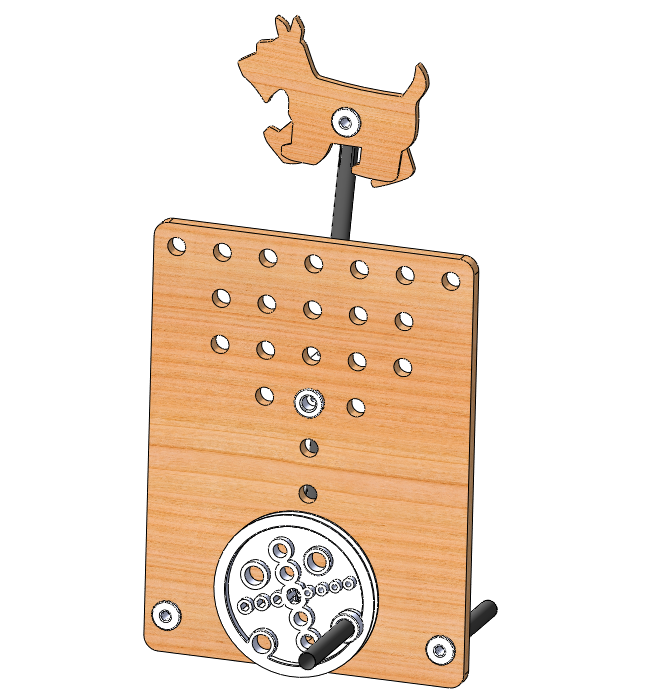
準備材料組裝參考步驟
Step 1. 組裝底盤
Step 2. 組裝驅動盤
Step 3. 以TT心軸穿過軸孔固定驅動臂與轉盤
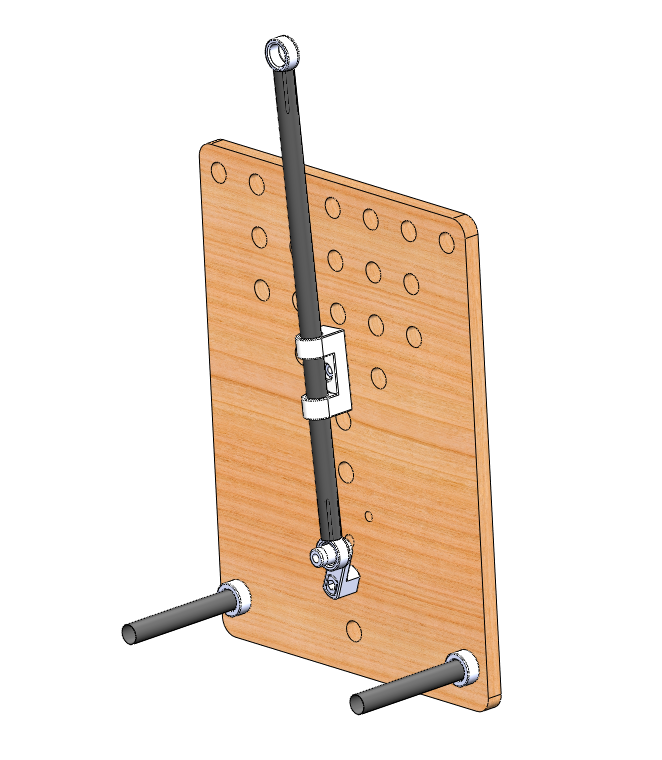
Step 4. 以2mm吸管組裝旋轉支點,使用滑塊扣釘穿過軸孔固定滑塊
Step 5. 以14mm吸管與2之1叉接頭組裝搖桿,穿過滑塊與固定支點組裝
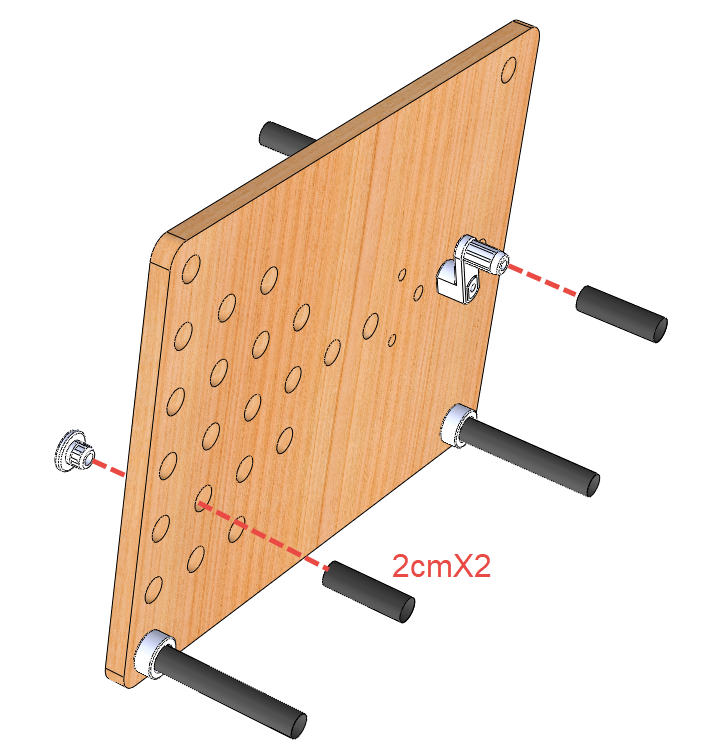
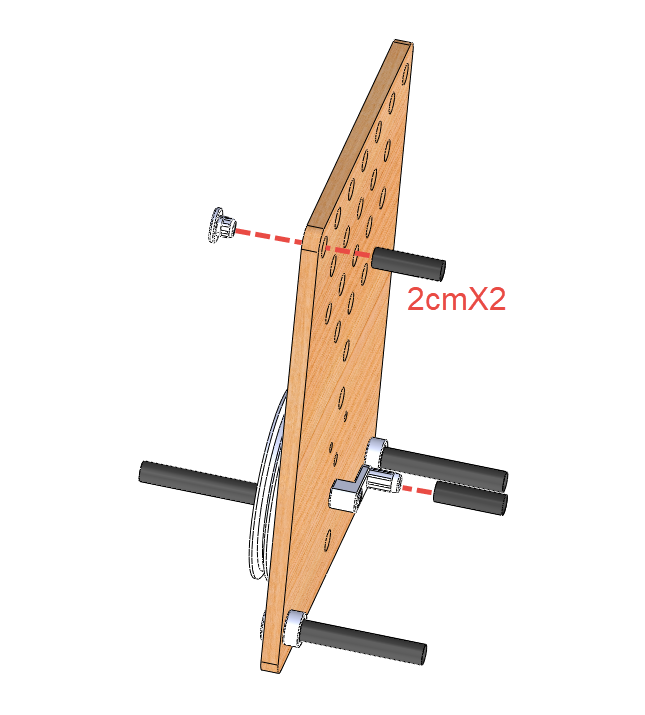
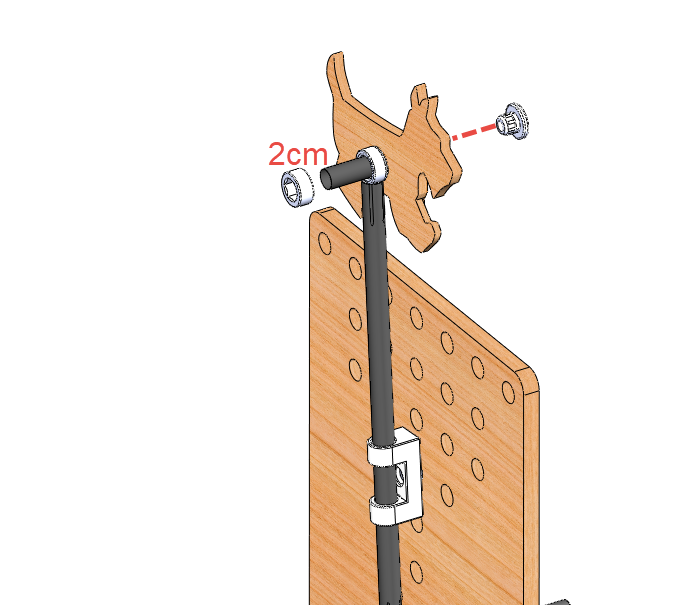
Step 6. 將小獵犬模型,使用2cm吸管與O環組裝與固定。
Step 7. 完成,轉動把手,觀察機構的動作
從背面觀察,滑塊只做擺動運動,搖桿被曲柄帶動傳過滑塊做上下與擺動,這個稱為擺動滑塊曲柄機構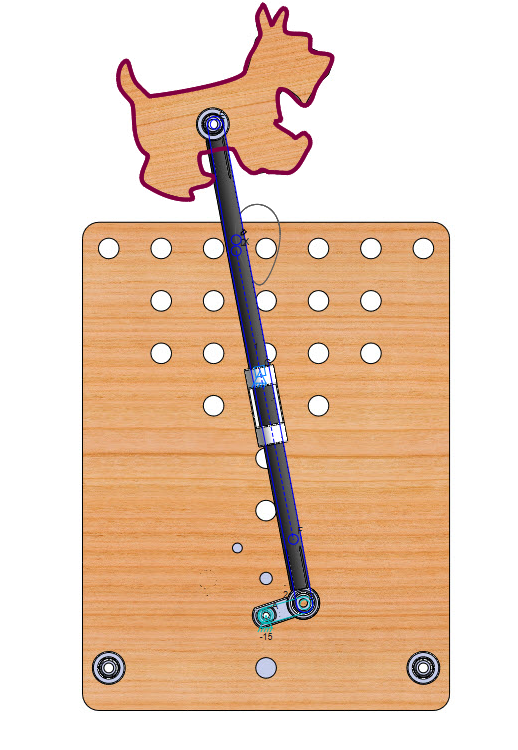
延伸思考:請將轉動的心軸,往下移動一孔再組裝,轉動把手,觀察機構動手有甚麼改變?
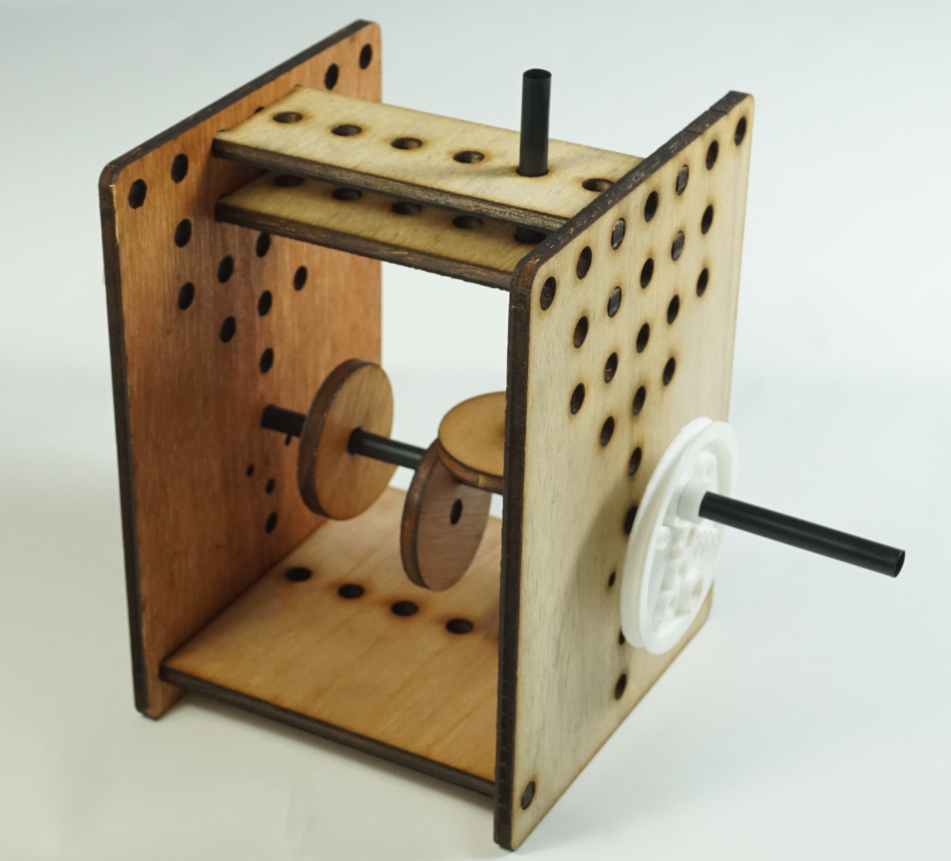
我們可以使用準備好的雷切底盤製作更多有趣的機構;再一次說明,你可以使用木板或其他材料去組裝框架,再製作各種形狀的凸輪、摩擦輪,設計與組裝更多樣的創意機構。
組裝好的框架,具有上下與左右三度空間的組合位置。
自做的各種凸輪,中間孔與6mm吸管緊配,由左至右分別為方形凸輪、蝸牛凸輪、蛋型凸輪、摩擦盤、偏心輪
使用硬紙盒也可以做成框架,輕鬆設計與製作連動機構,透過這些方便的素材,我們可以參考其他作品,設計與製作自己的連動機構,快樂動手做吧!
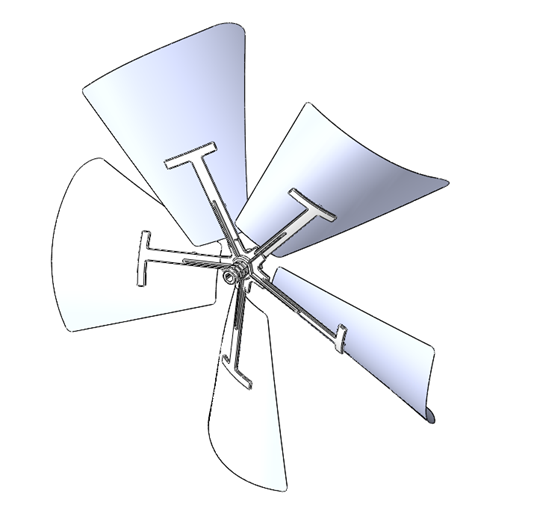
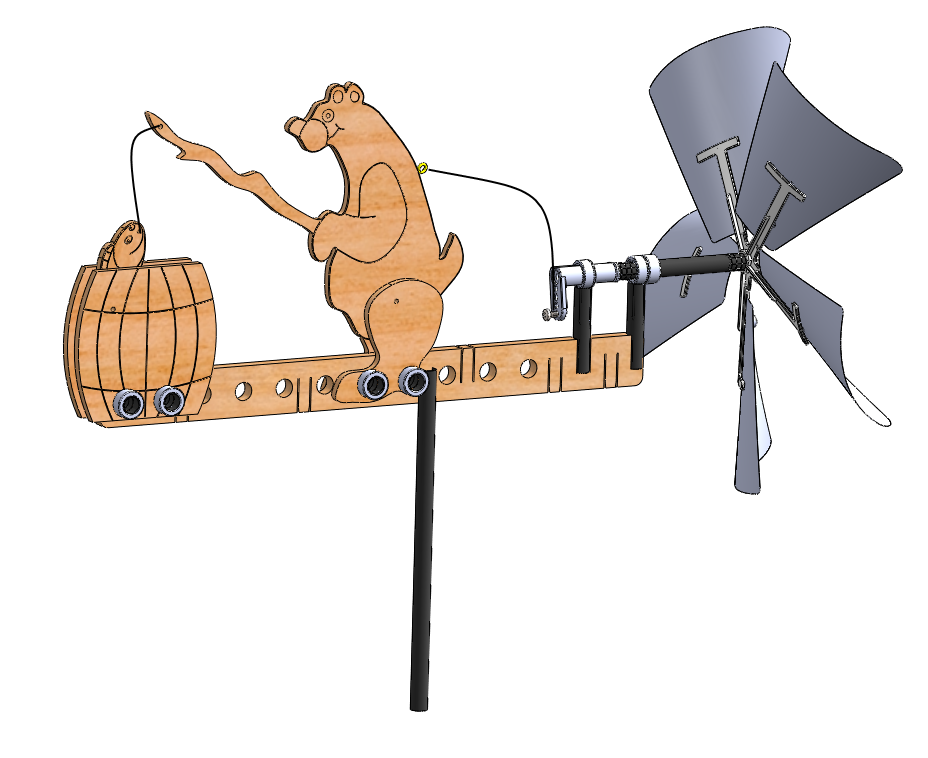
風動力吸管機器人簡介
將風能轉變成旋轉動能,再透過各種機件組合作出生動的連動機構,稱為風動機構(whirligig),在網路搜尋關鍵字:” whirligig”,將會發現許多有趣的圖片與影片,這些都是以風車扇葉帶動的動態機構例子。
如圖所示,我們可以發現,當葉片轉動帶動曲柄後,便拉著熊的身體前後擺動,可愛的熊在釣魚的動態機構模型。 使用風能作為動力來源,創作自己的風動力連動機構,既省成本又環保。
使用風能作為動力來源,創作自己的風動力連動機構,既省成本又環保。
吸管機器人提供了使用風動力的扇葉零件,由風力帶動風扇傳動曲柄,作全周旋轉運動,再藉由不同設計的連桿機構,可以輸出擺動、旋轉等不同的效果。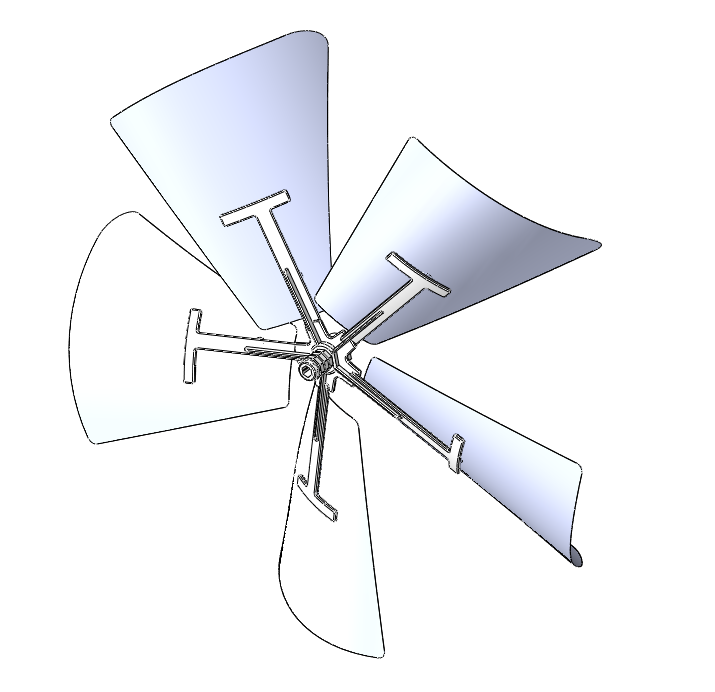 在接下來的內容,我們將使用吸管連接件,配合其他材料,例如木板雷切造型,紙卡等,設計製造自己的風動力連動機構。
在接下來的內容,我們將使用吸管連接件,配合其他材料,例如木板雷切造型,紙卡等,設計製造自己的風動力連動機構。
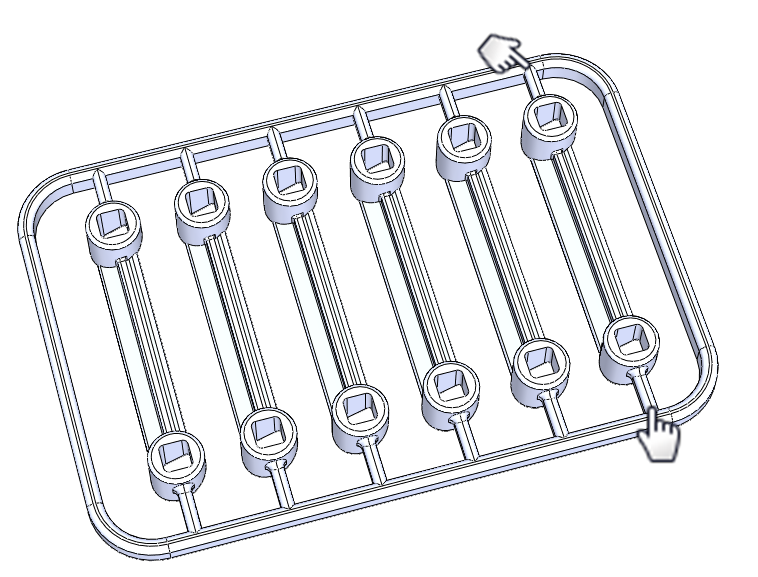
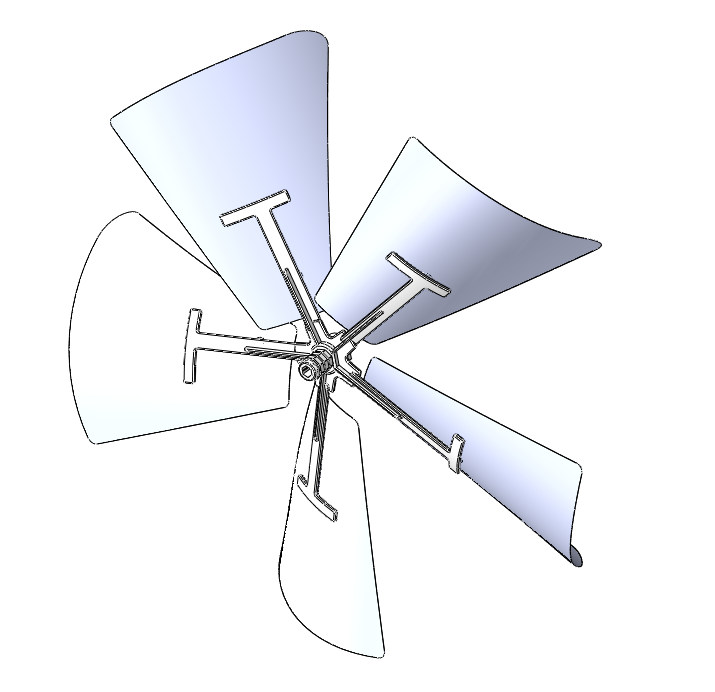
扇葉組裝
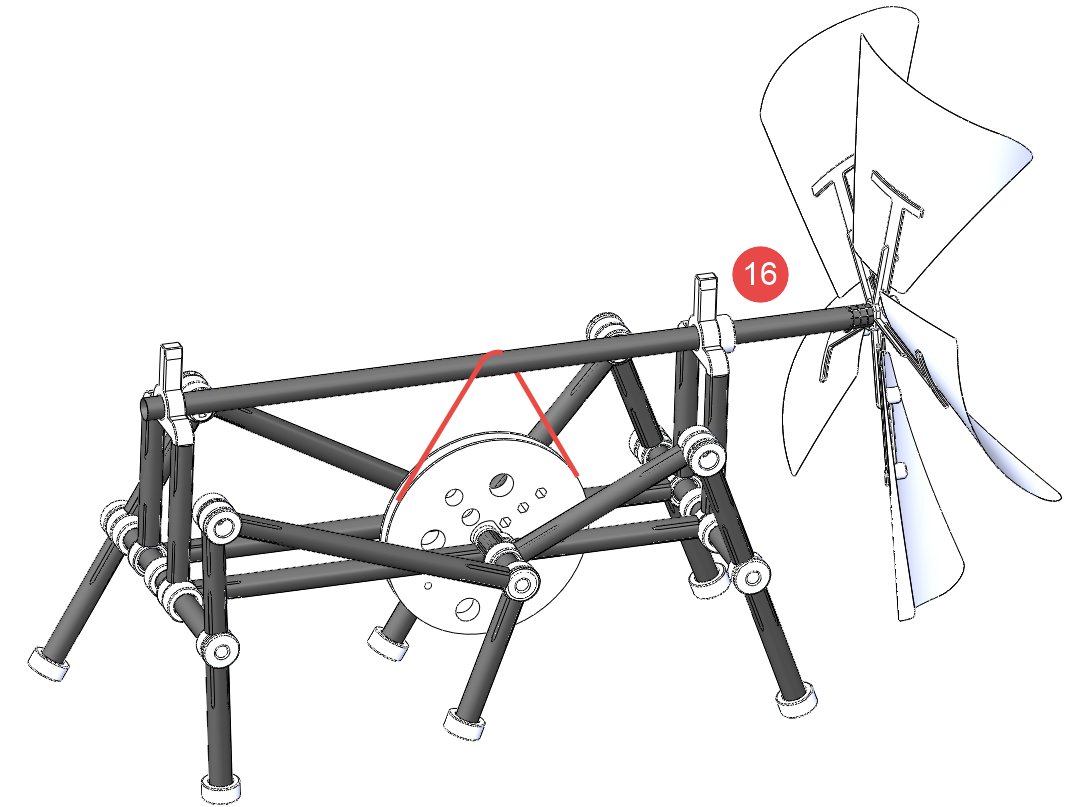
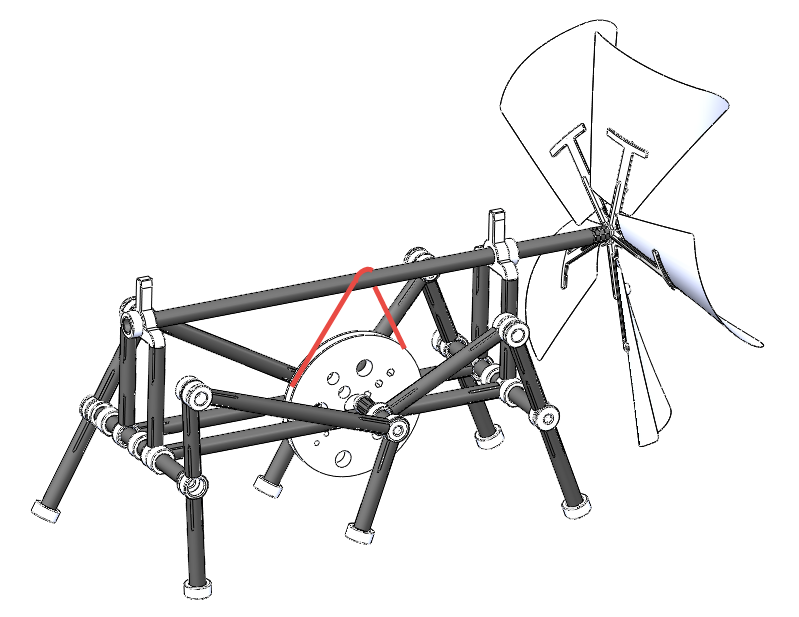
風動力六足機器人這個風動力六足機器人構想源自於日本的Craftel,原設計是使用紙張去製作葉片、各部分的連桿與造型,我們轉換成使用吸管輕鬆組裝製作。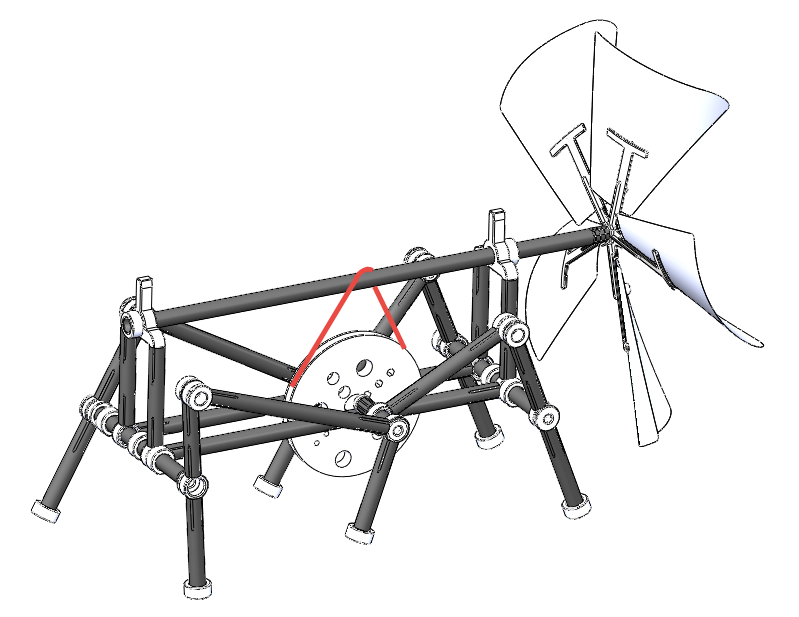
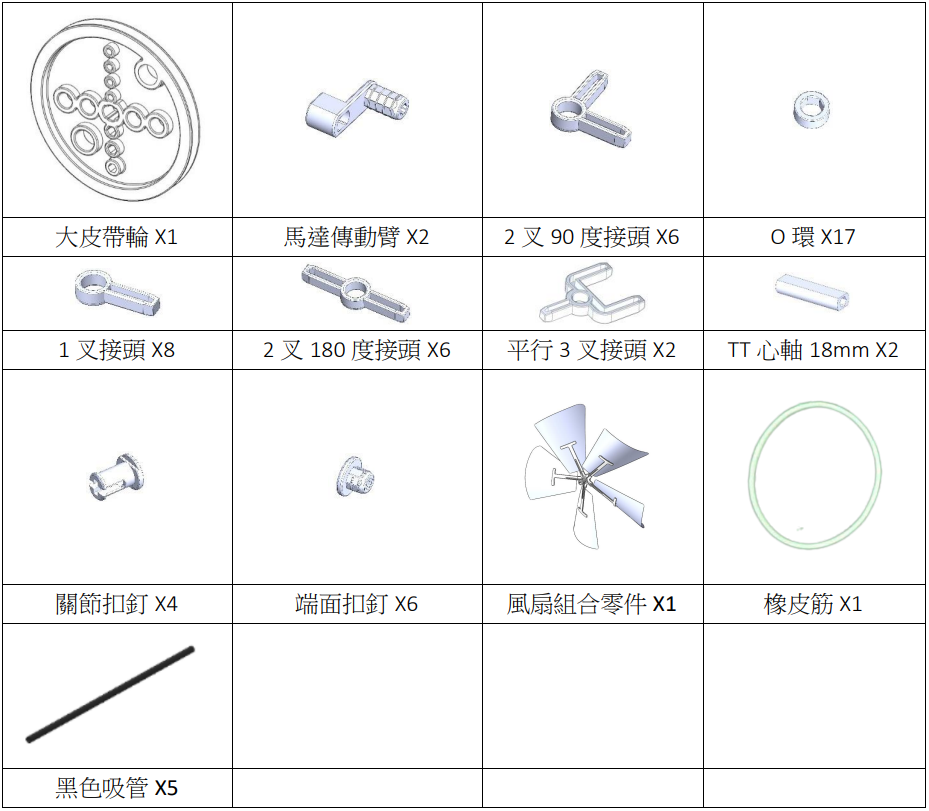
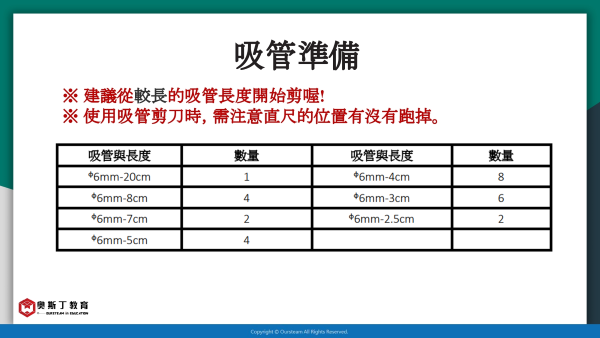
準備材料吸管與長度組裝參考步驟
Step 1. 組裝2組本體支架
Step 2. 使用平行3叉接頭連接2支架
Step 3. 將大皮帶輪一側墊入O環,使用2支TT心軸串起
Step 4. 組裝驅動臂與延伸桿,兩個驅動臂呈180度差
Step 5. 橫向支架7cm,裝上定位環
Step 6. A.C為前後足,B為中足,D為拉桿,各組裝2組
Step 7. 使用關節扣釘與端面扣釘將一側的腳依序定位
Step 8. 另一側足部,依照鏡射方式組裝
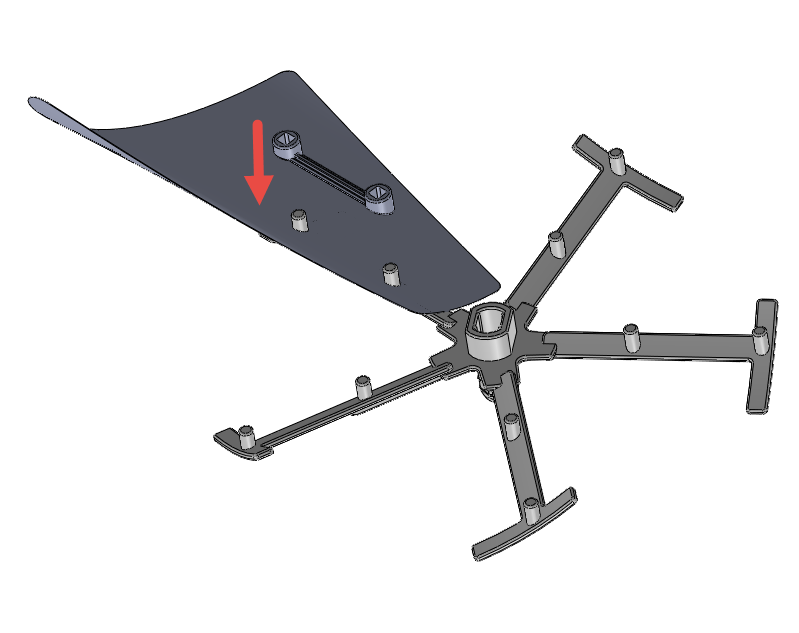
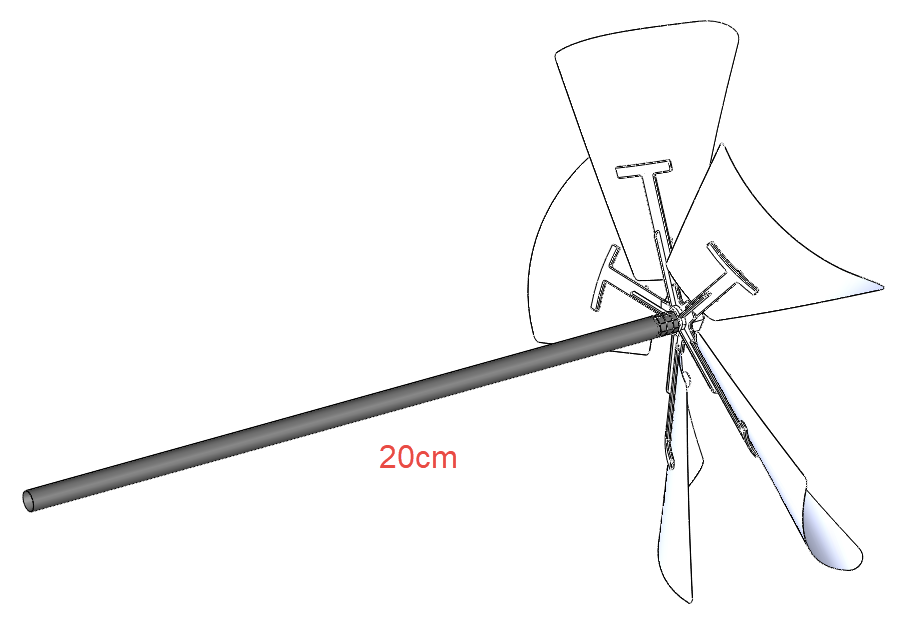
Step 9. 將風扇以20cm吸管接合
Step 10. 組裝葉片時,先穿一個O環定位,再將橡皮筋(拆開一邊的TT心軸)繞過大皮帶輪並穿過20cm轉軸。
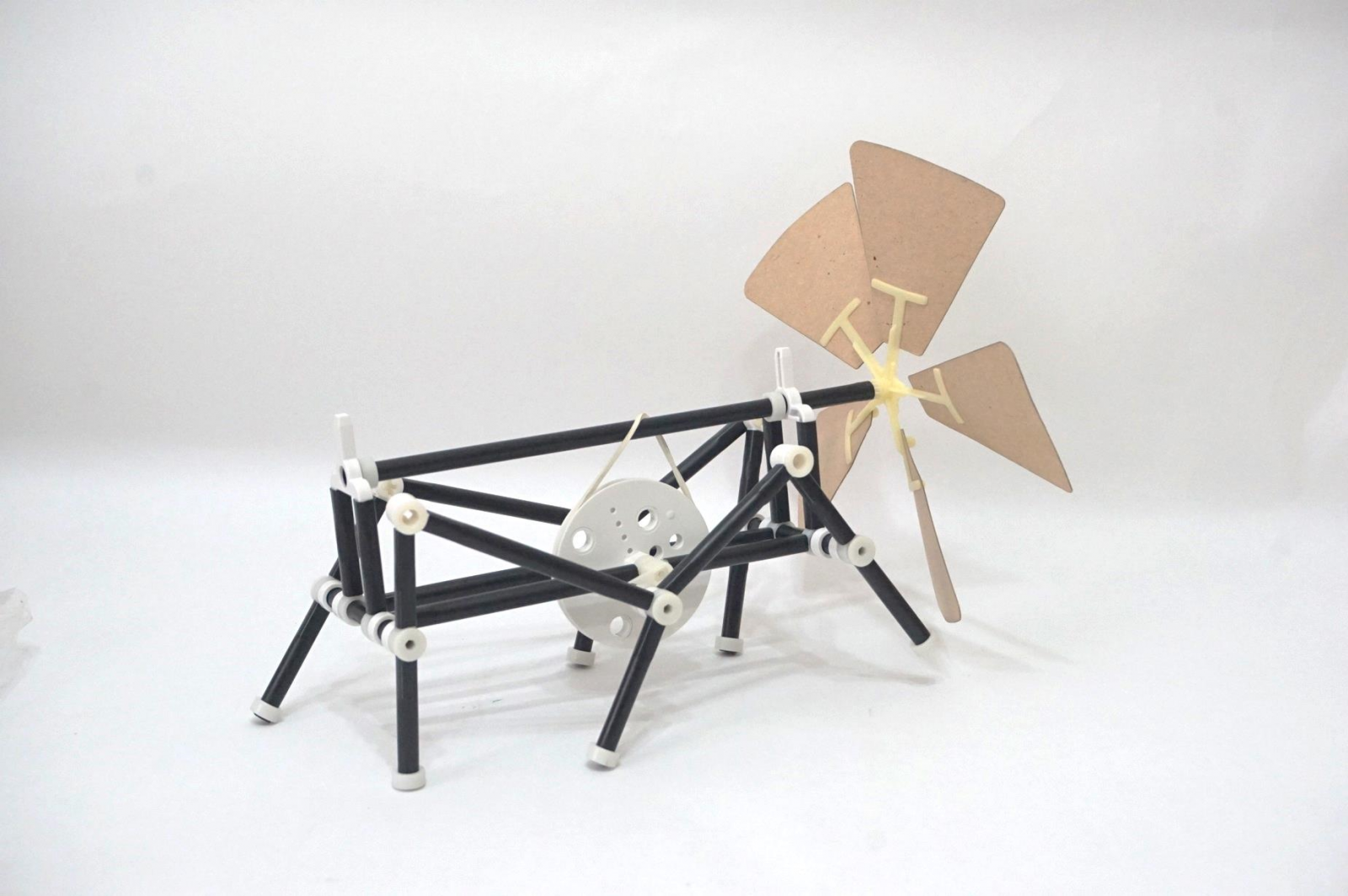
Step 11. 使用O環定位心軸,完成
請用電風扇吹動葉片,當心軸轉動,橡皮筋帶動皮帶輪旋轉,6足機器人會緩步向前行走。請試試看,橡皮筋從右到左穿過心軸,與從左到到右穿過心軸,轉向有甚麼變化?
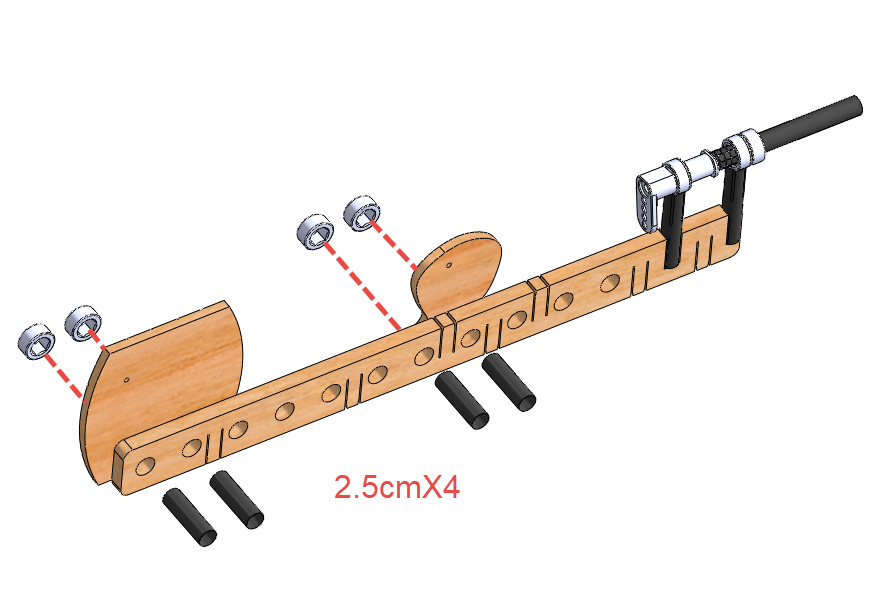
風動力釣魚熊我們參考網路釣魚熊造型作為範例,介紹使用吸管與連接件來創作風動力連動機構。利用風力帶動曲柄,轉換成熊身體的擺動,作出靈活的釣魚動作。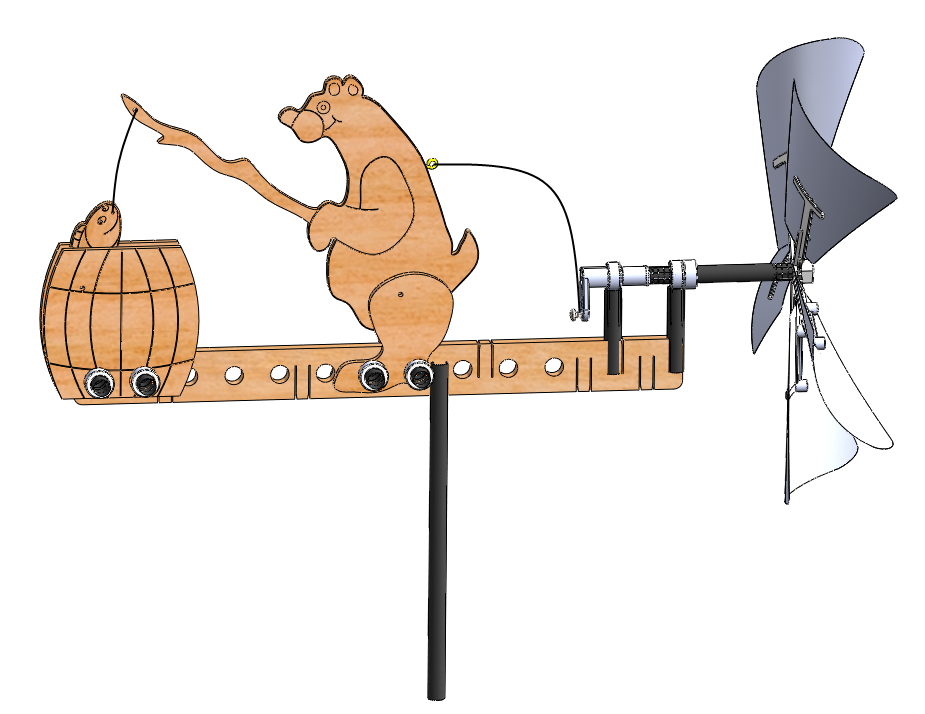
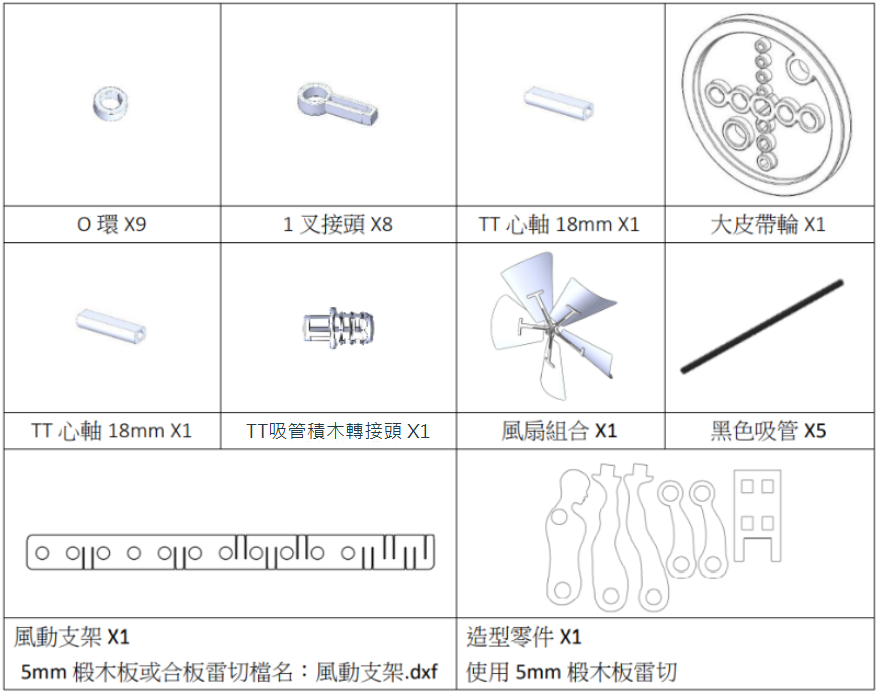
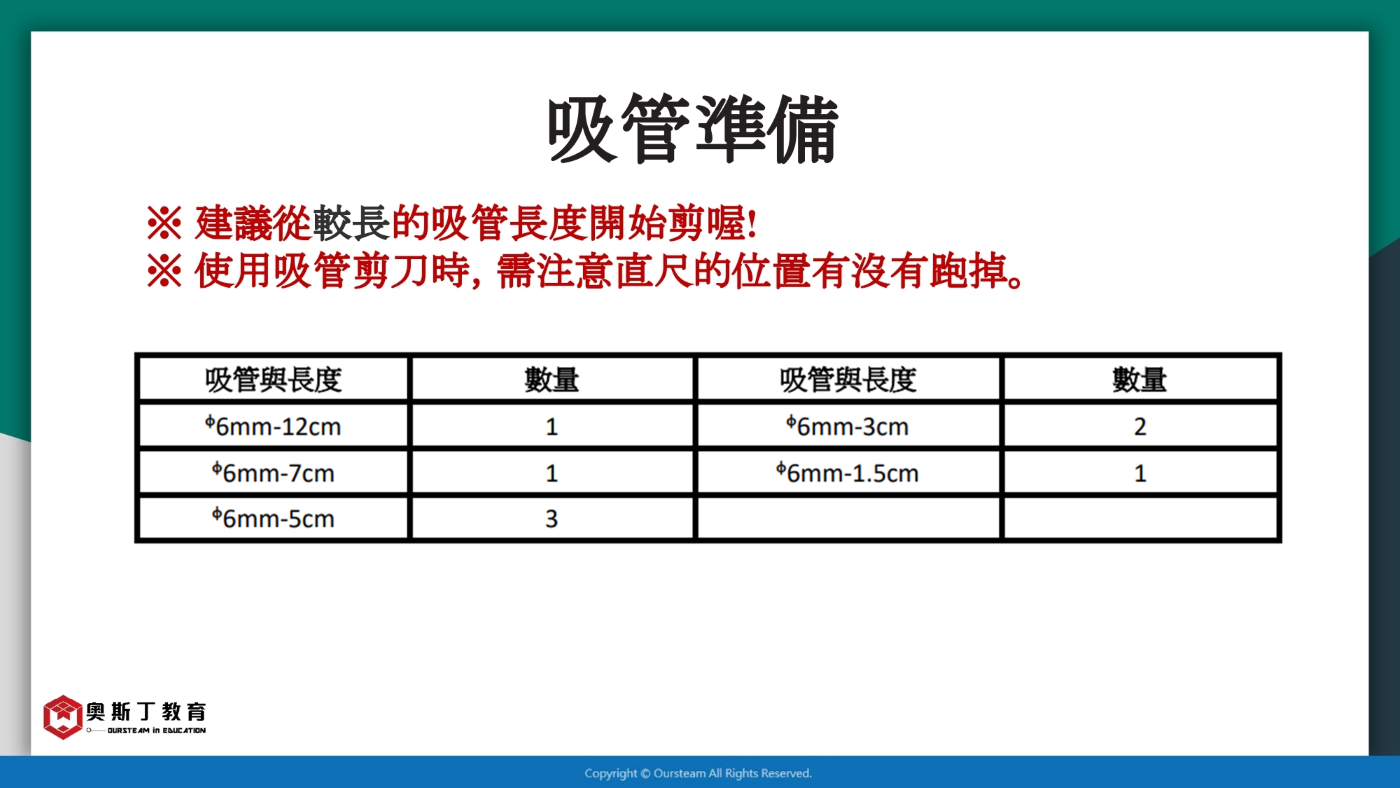
準備材料吸管與長度組裝參考步驟
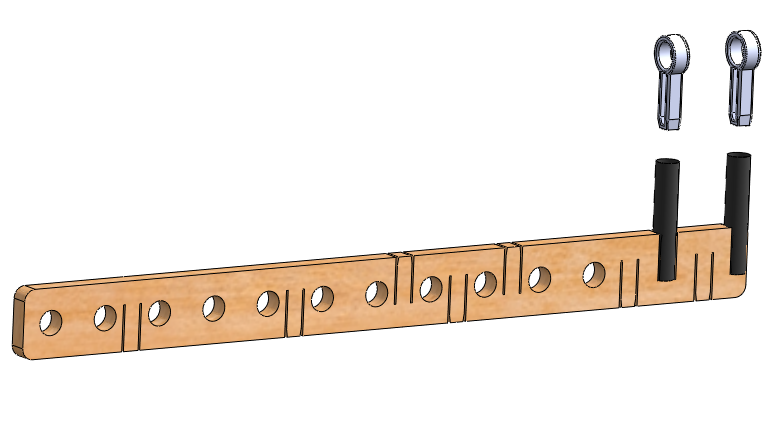
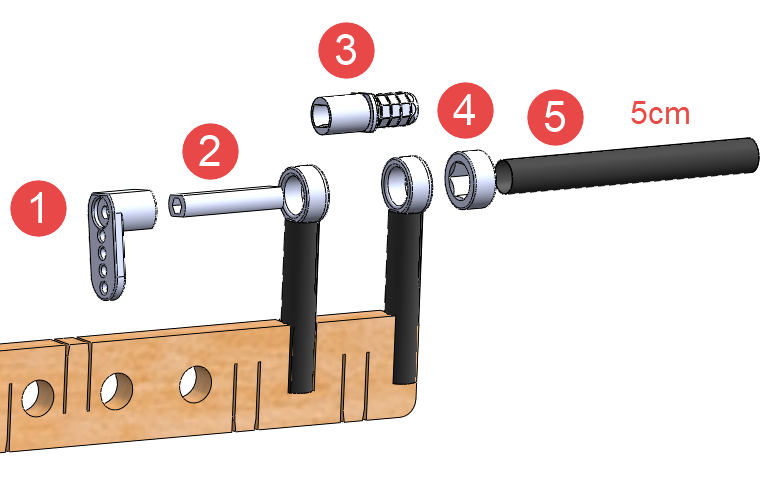
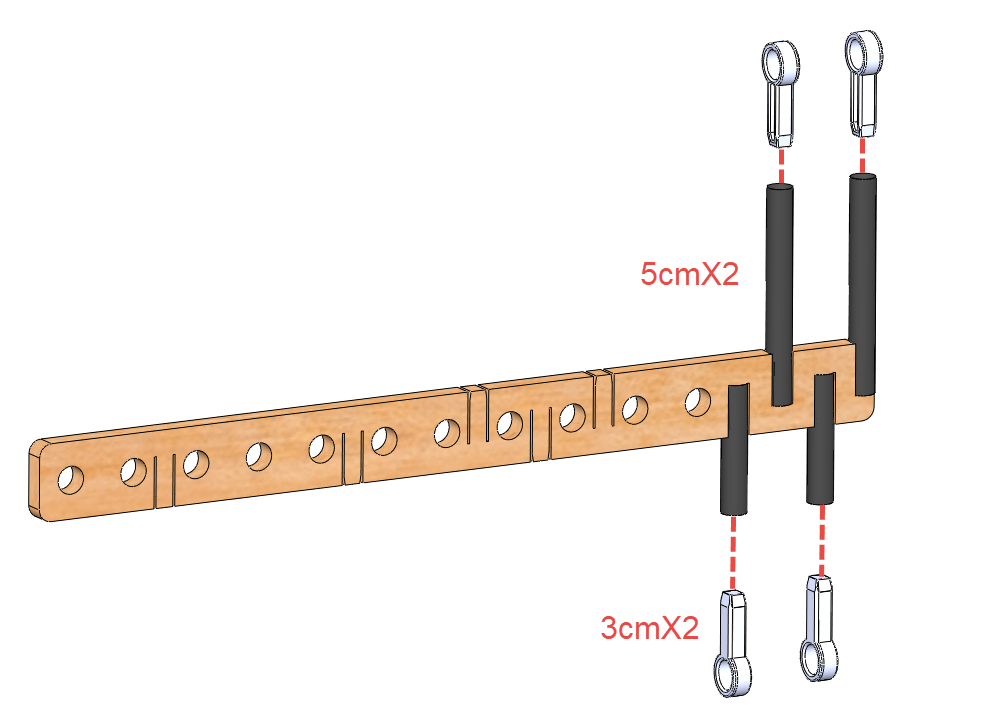
Step 1. 使用3cm吸管與1叉接頭作支撐桿
Step 2. 依序組裝轉動軸
Step 3. 使用2.5cm吸管與O環固定造型零件
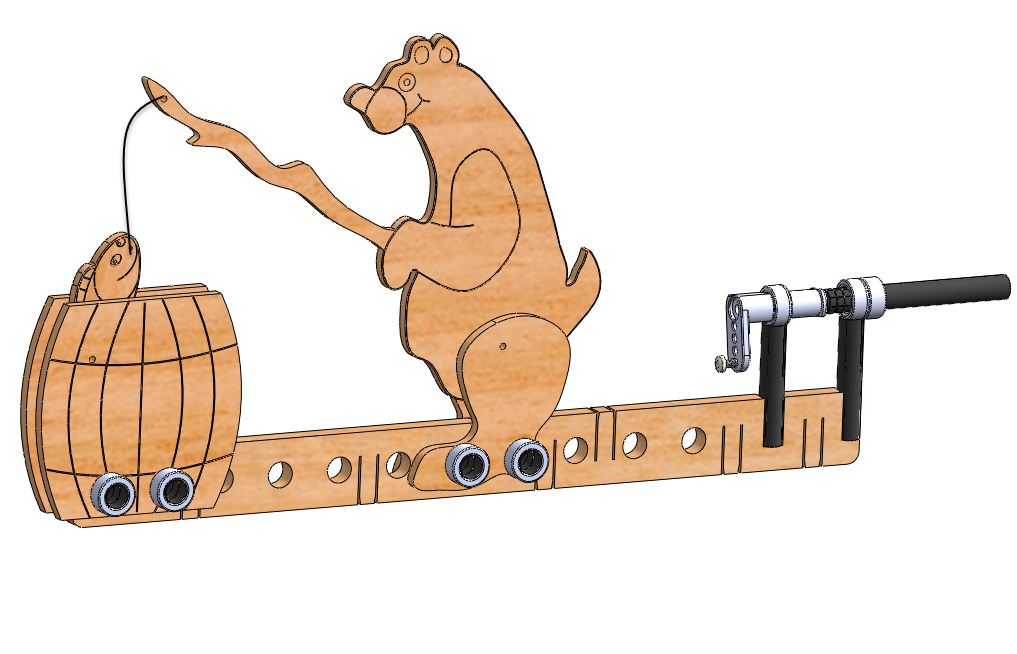
Step 4. 使用O環固定另一側造型零件,熊的身體與魚以m2尖尾螺釘固定作旋轉中心,魚與釣竿間使用釣魚線連接,長度先不固定
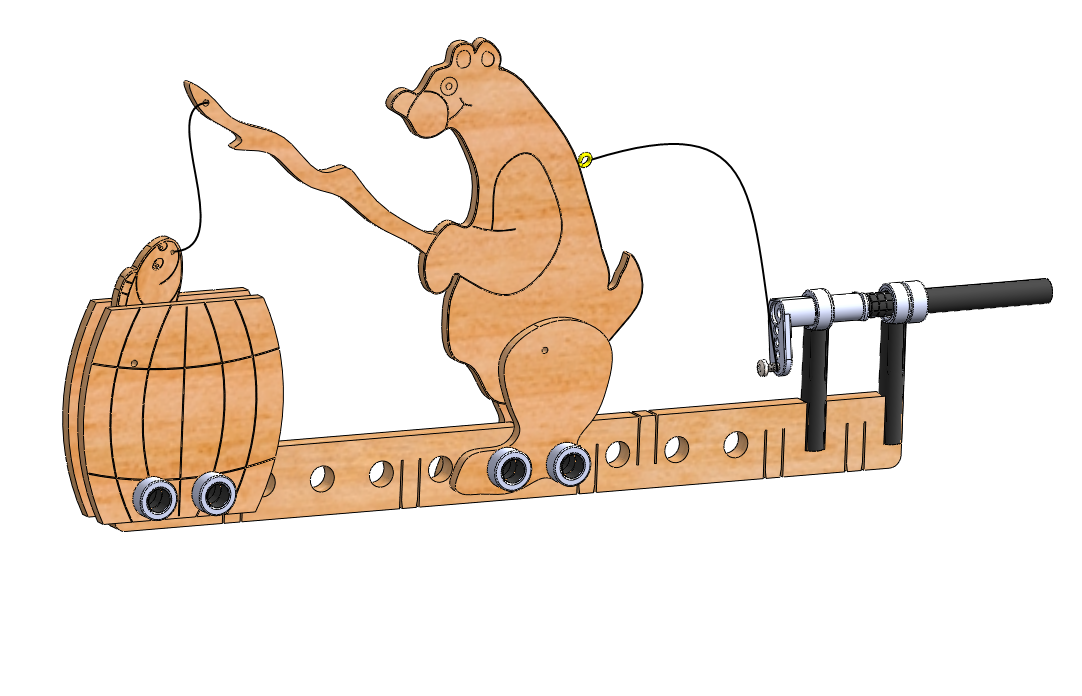
Step 5. 熊的身體裝上小羊眼釘,驅動曲柄鎖m2尖尾螺釘固定作驅動旋轉中心,用#22鋼線連接,注意鋼線要在m2尖尾螺釘上繞1個環,能順利作全周轉動
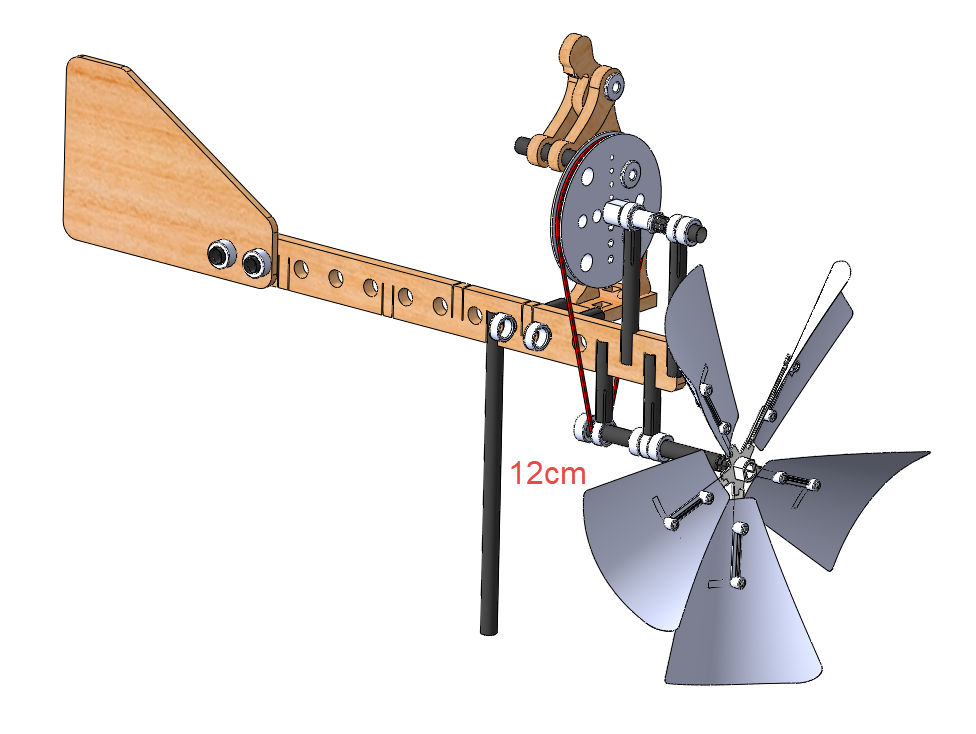
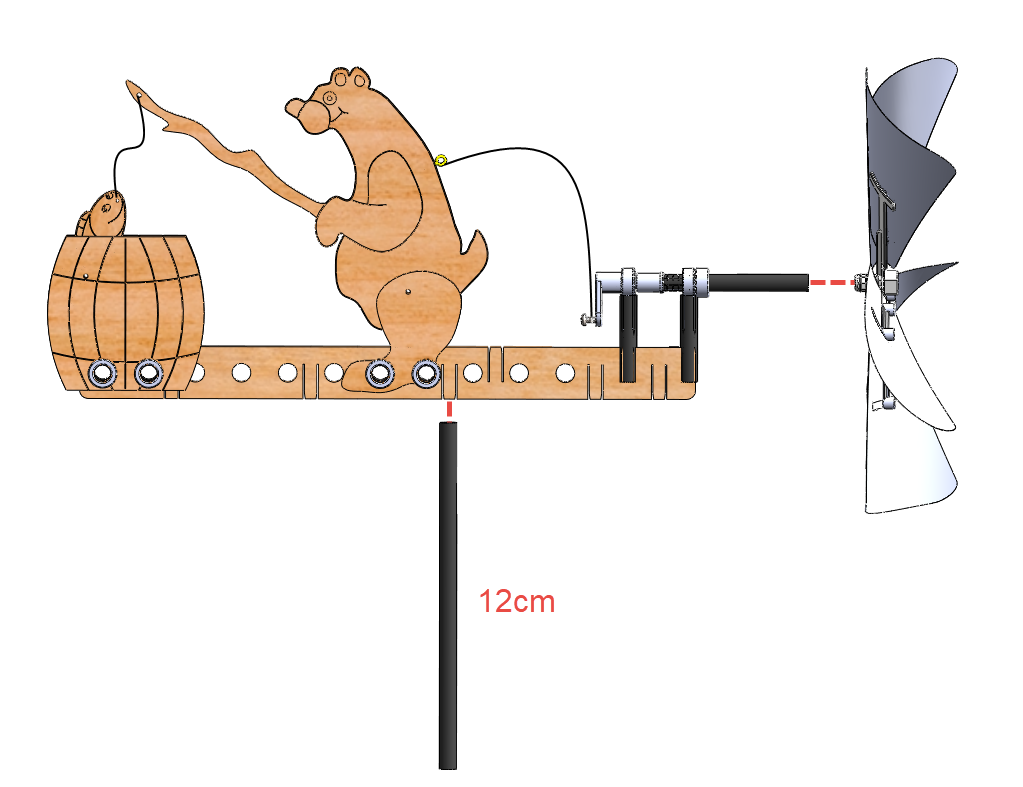
Step 6. 組裝風扇,裝上12CM吸管轉動軸
Step 7. 完成!使用電扇吹吹看,有趣的連動機構-釣魚熊,你也可以放在室外,輕輕的風就可以讓風動力機構不斷運轉
以曲柄搖桿機構構成,還可以自行設計不同的造型風動力連動機構-如圖為騎士造型的實際模型。

風動力工作者我們參考網路工作者風動機構,應用小輪傳動大輪,來完成機構減速與增加扭力的效果,風力帶動的旋轉運動,輸出工作者緩慢轉動大輪的動作,很有臨場感。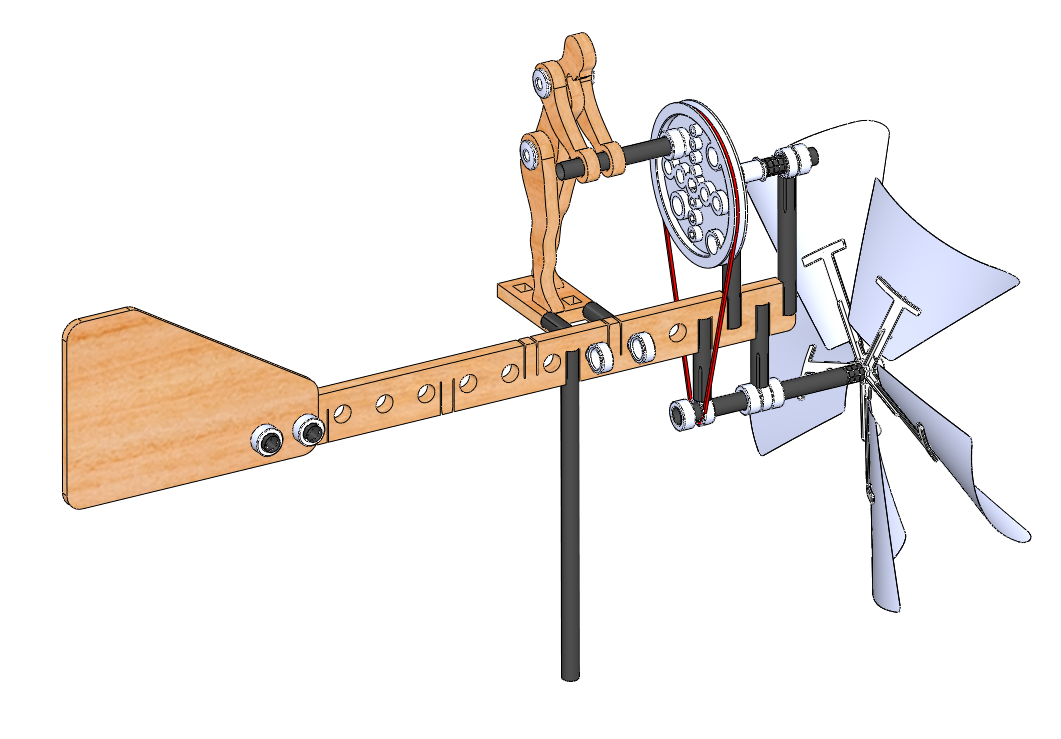
準備材料吸管與長度組裝參考步驟
Step 1. 使用3cm吸管,5cm吸管與1叉接頭作支撐桿
Step 2. 依序組裝從動軸
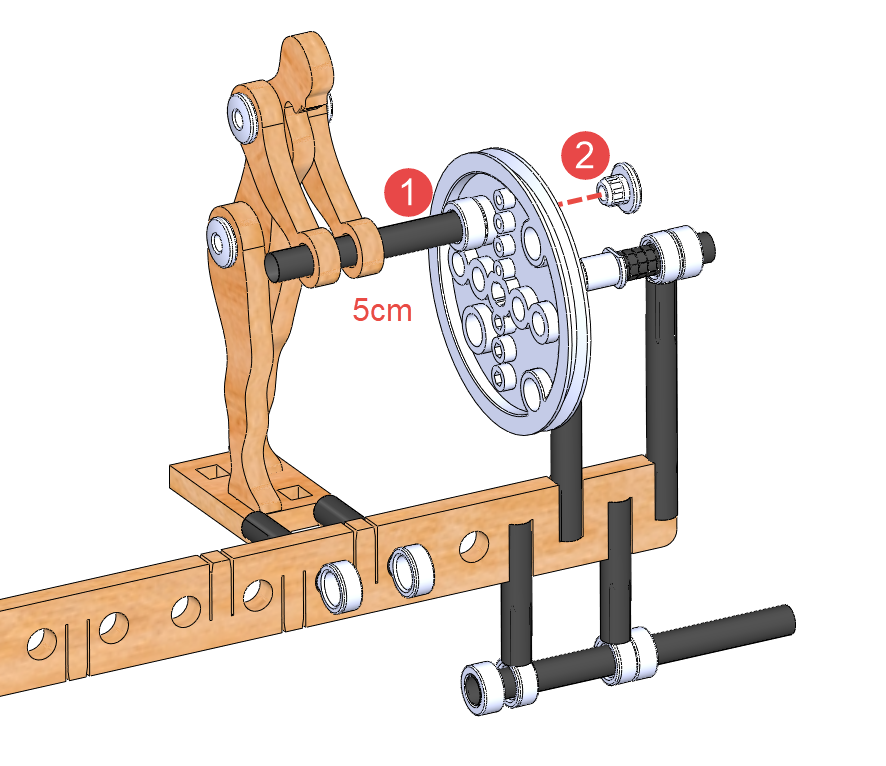
Step 3. 依序組裝主動軸。7cm吸管3個O環定位,第1個O還與一叉接頭保持2mm間隙,作為小皮帶輪功能位置。
Step 4. 使用1.5cm吸管與端面扣釘將工作者造型與底板組裝起來。
Step 5. 使用3cm吸管與2支1叉接頭將工作者與支架組裝在一起。
Step 6. 使用5cm吸管與O環、端面扣釘將工作者手部與大皮帶輪組裝在一起。
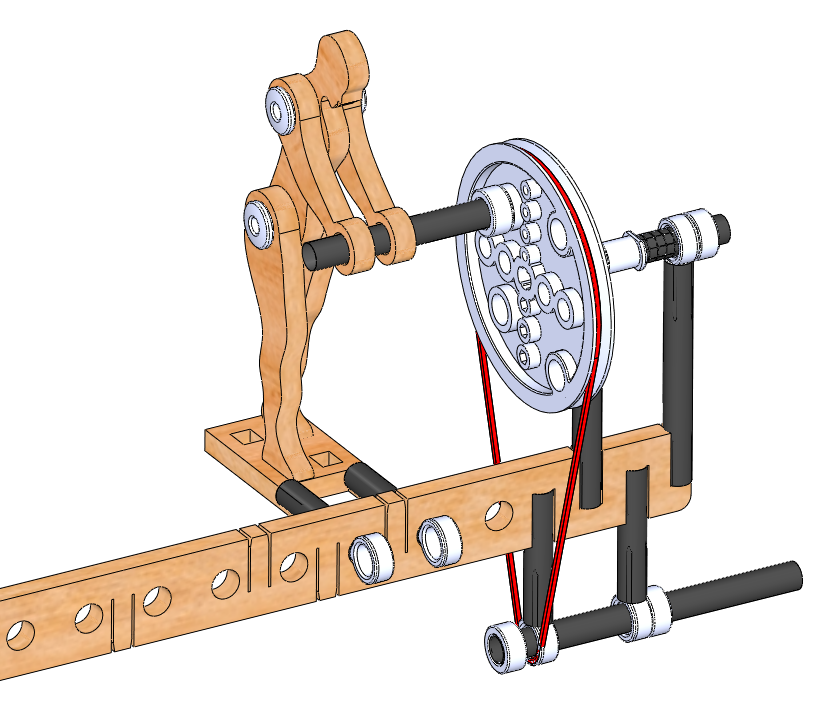
Step 7. 套上傳動的橡皮筋,如果覺得太緊,可以將橡皮筋拉鬆後再重新套上。
Step 8. 使用2cm吸管與4個O環固定尾翼。
Step 9. 組裝風扇與12cm的吸管立柱,完成。
























.jpeg)

















.png)