PARENTS
親子
TEACHERS
教師
GOODS
產品
OUR ESG
社會責任
CONTACT
聯絡我們
NEWS
最新消息
首頁
教學資源
木製仿生獸系列
六足甲蟲仿生獸DIY步驟解說(含micro:bit版本)教學
教學資源
2022/07/05
六足甲蟲仿生獸DIY步驟解說(含micro:bit版本)教學
主題介紹
BBC micro:bit
六足甲蟲仿生獸
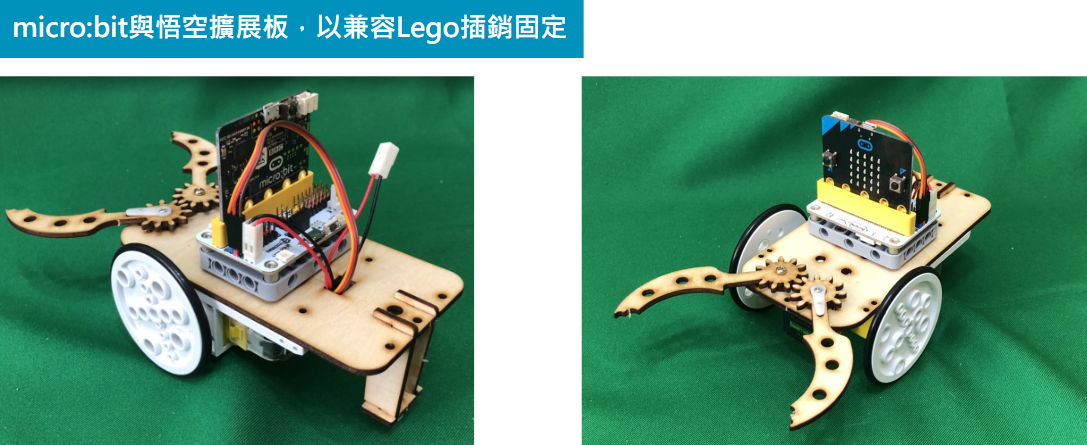
成品
以Micro:bit程式控制甲蟲動作,亦可以快速轉換為夾爪輪車。
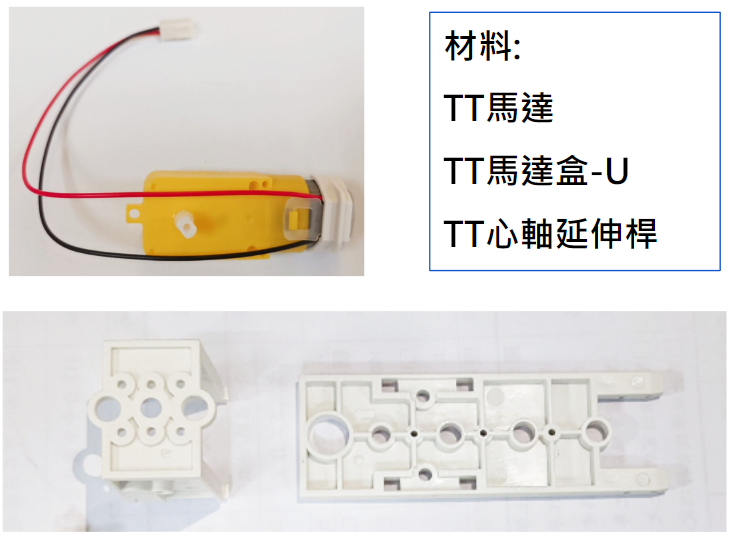
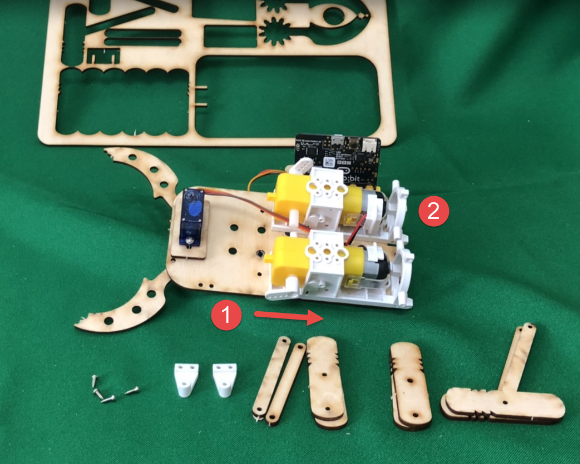
雷切木板材料與組裝步驟Ⅰ-萬象輪車
步驟一
取下雷切的甲蟲零件後,毛邊可用砂紙輕輕修整。
※小提醒
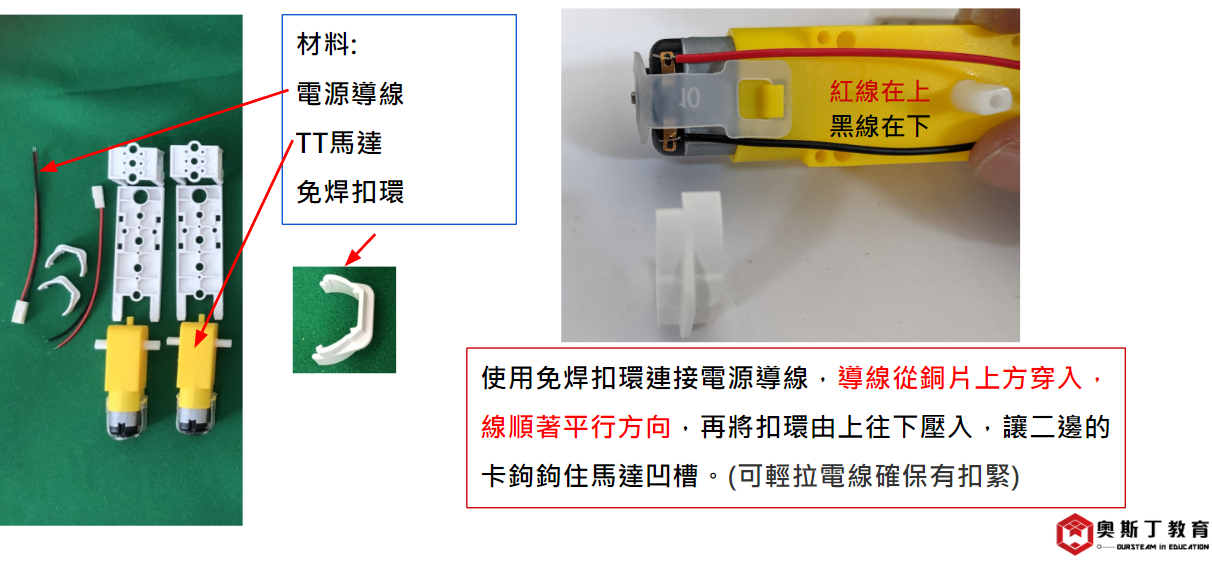
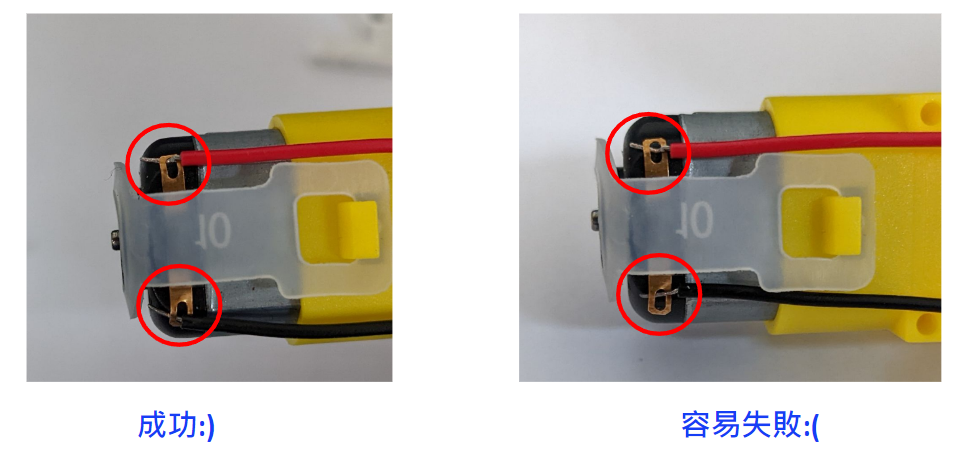
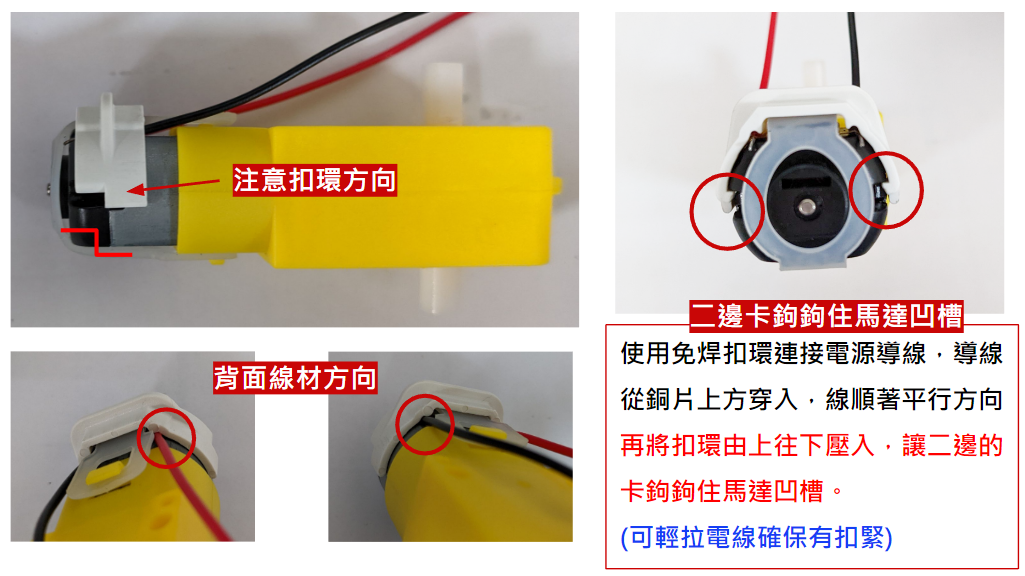
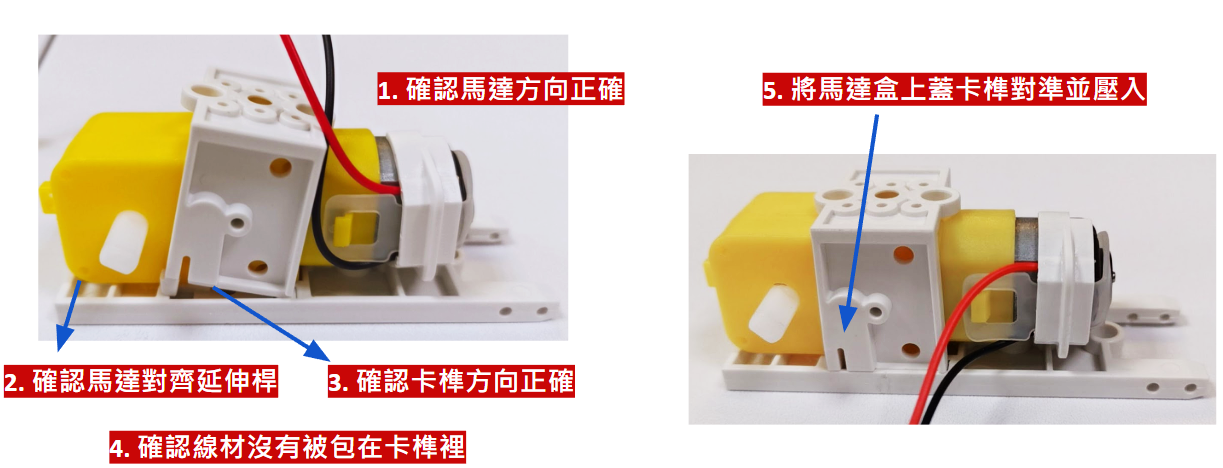
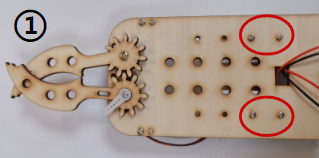
導線放置小訣竅:
盡可能把電線放在最旁邊,鎖上後才不容易掉喔!
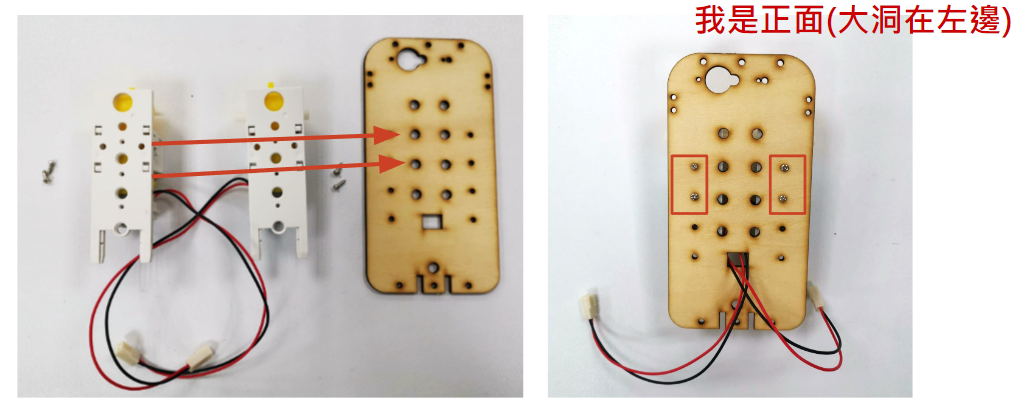
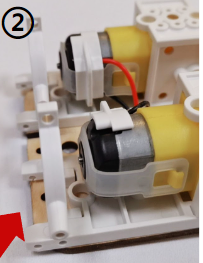
步驟二
※小提醒
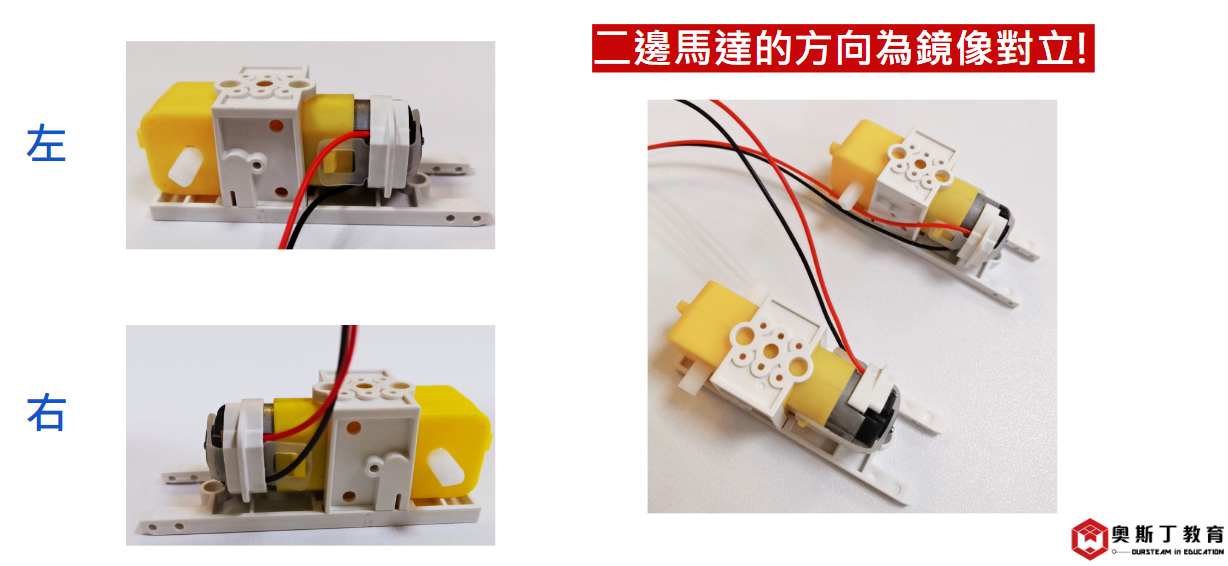
請留意馬達的方向!!
第一顆馬達朝【左】時、第二顆馬達朝【右】時:
紅線在上
&
黑線在下
二顆馬達都組裝電源導線後,請依照下圖擺放檢查是否對立:
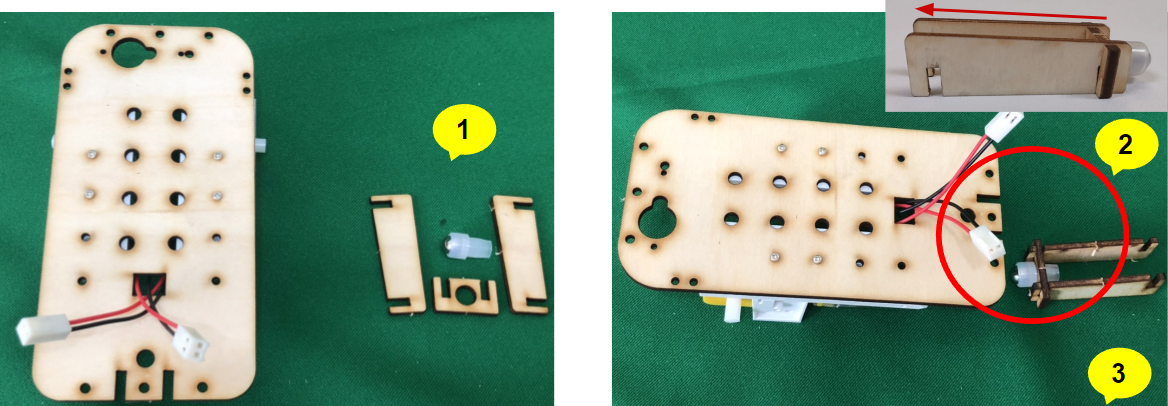
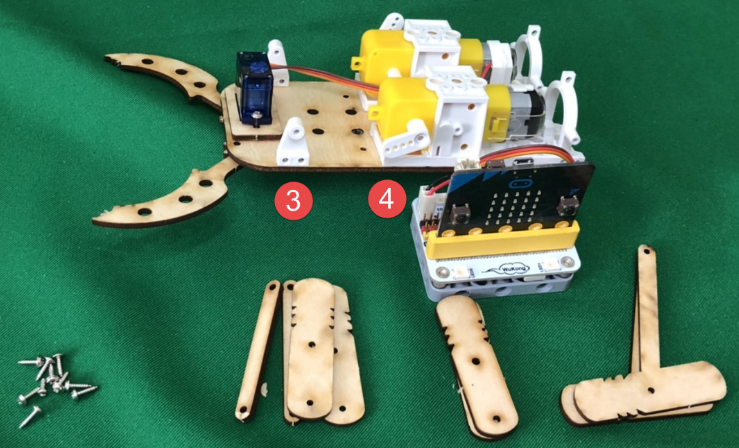
步驟三
步驟四
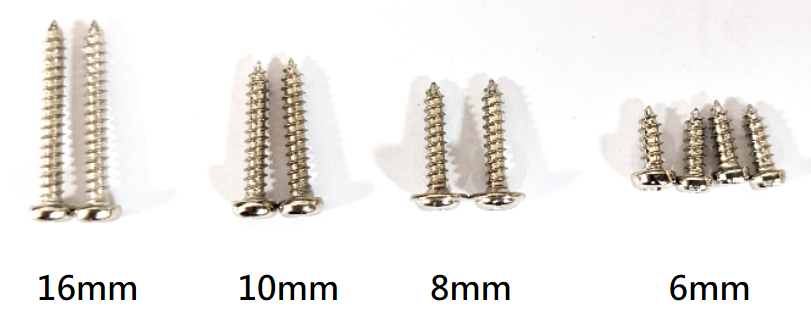
認識四種螺絲尺寸!!
接著取下底盤材料,將左邊馬達用
2顆6mm(最短的)螺絲
鎖上右邊重複相同步驟並鎖在最左邊,讓
兩邊的線往中間靠攏
。
步驟五
馬達組裝完成後,組裝後方的
滾珠輪
,將滾珠塞入小孔中
。
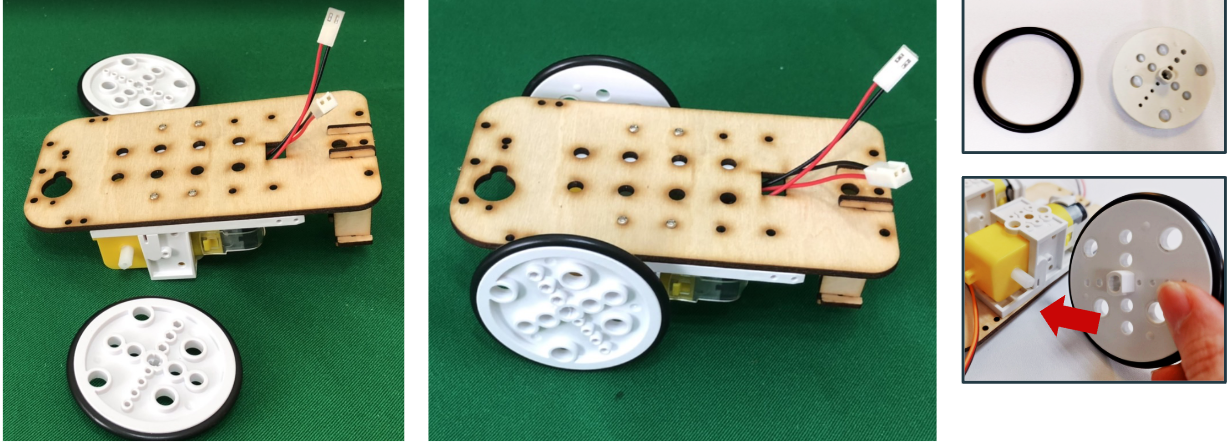
組裝前輪 -
有凹槽的那面向內插進軸心
,另一面則向外。
比照此步驟安裝另一邊的輪子。
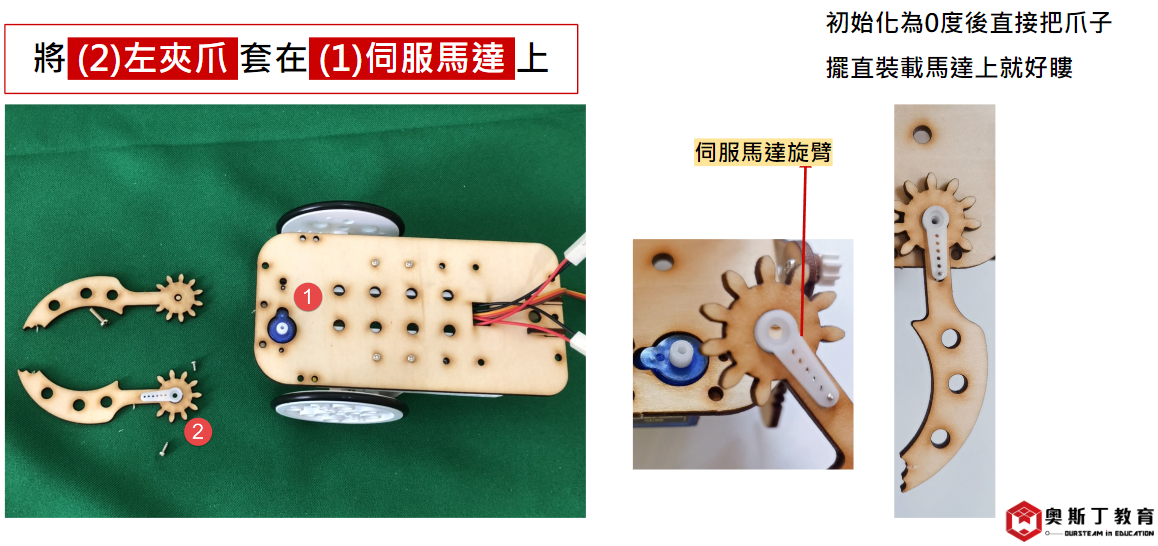
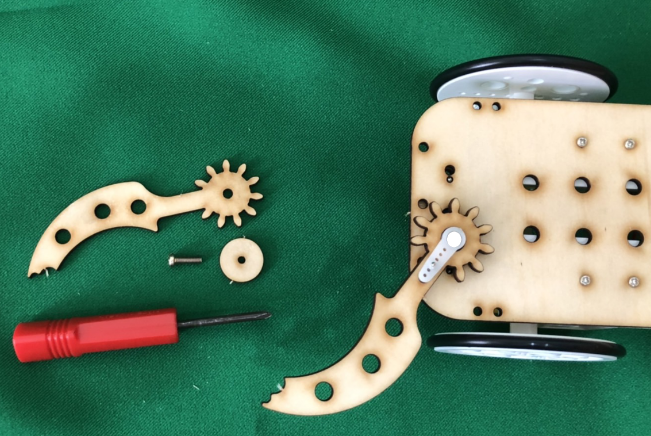
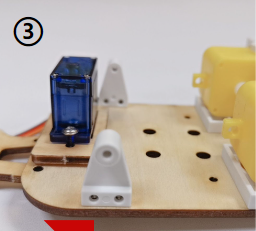
步驟六
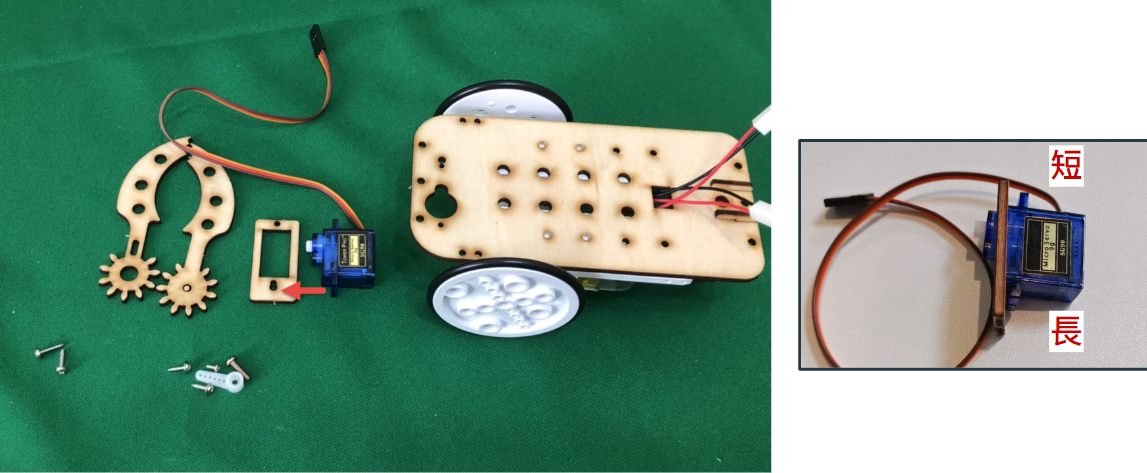
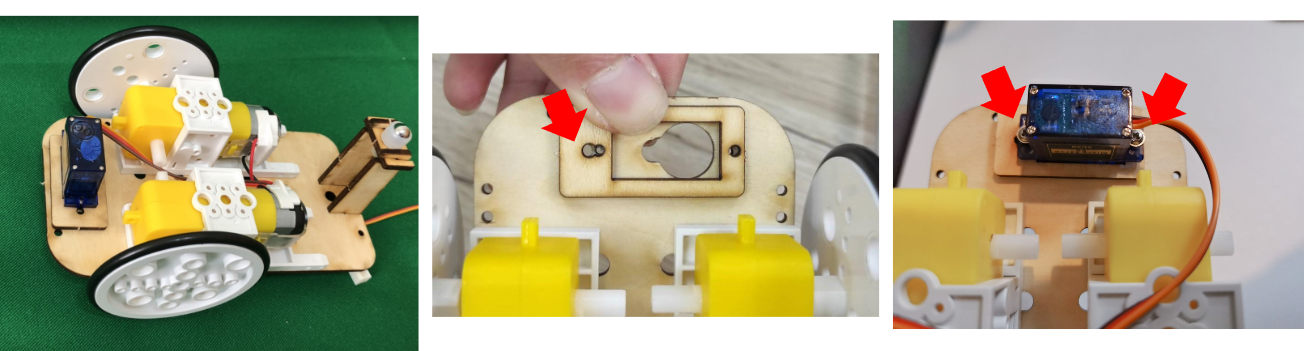
準備材料:
前爪及墊片
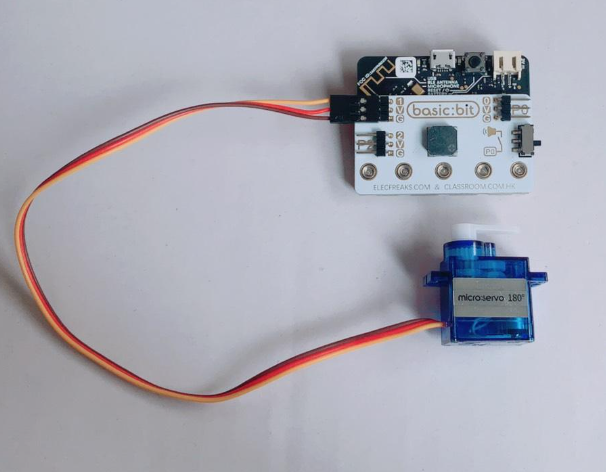
伺服馬達
※如右圖先套一片墊板 !
接著將伺服馬達從下方接到底盤上,墊板兩顆洞的位置放在左邊,用2顆8mm螺絲鎖緊。
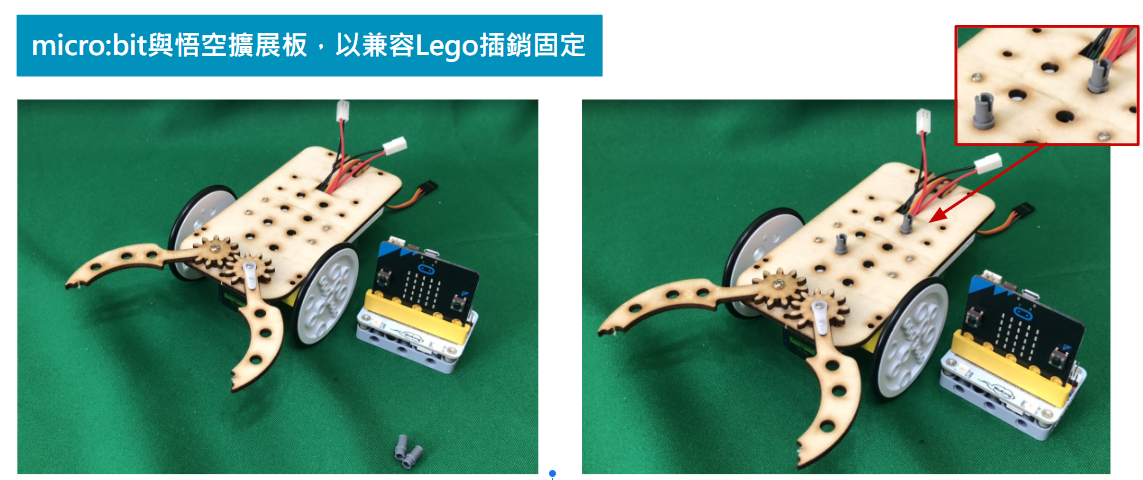
步驟七
插銷的短邊
往下方插入底盤,試組裝可調前後位置調整重心。
(
棕G
、
紅V
、
橘S7
)
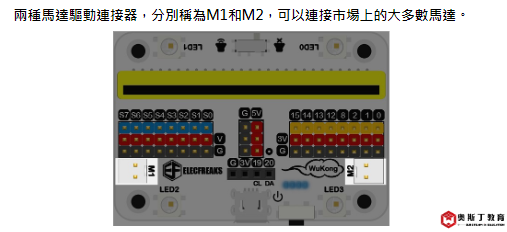
伺服馬達接S7腳位
,
左馬達接左邊M1接口
,右馬達接右邊M2接口。
步驟八
測試伺服馬達
為了精確地控制甲蟲的角,我們首先必須對伺服馬達初始化,點選上面的連結可以下載測試程式,
燒錄至Microbit後,馬達會被初始化為0度,按下A鍵會+5度,按下B鍵會-5度,腳位預設為S7。
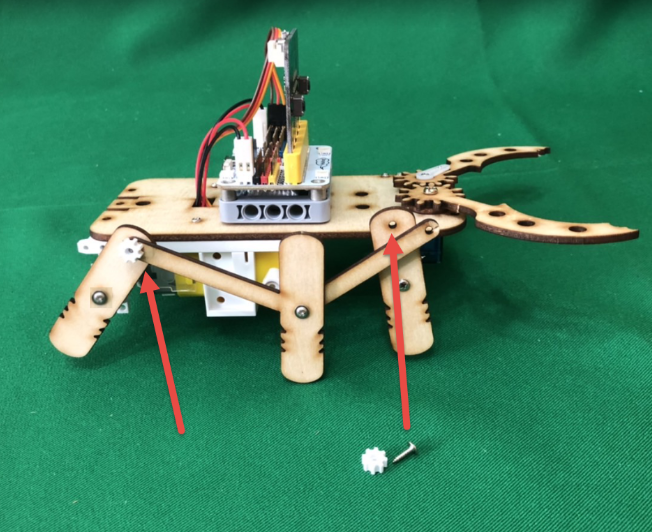
接下來將
伺服馬達旋臂
由後往前在
左夾爪
鎖上
6mm(最短的)螺絲
右夾爪下方
要墊一片墊圈
觀察二側夾爪是否對稱,再鎖緊
M6(最大的)螺絲。
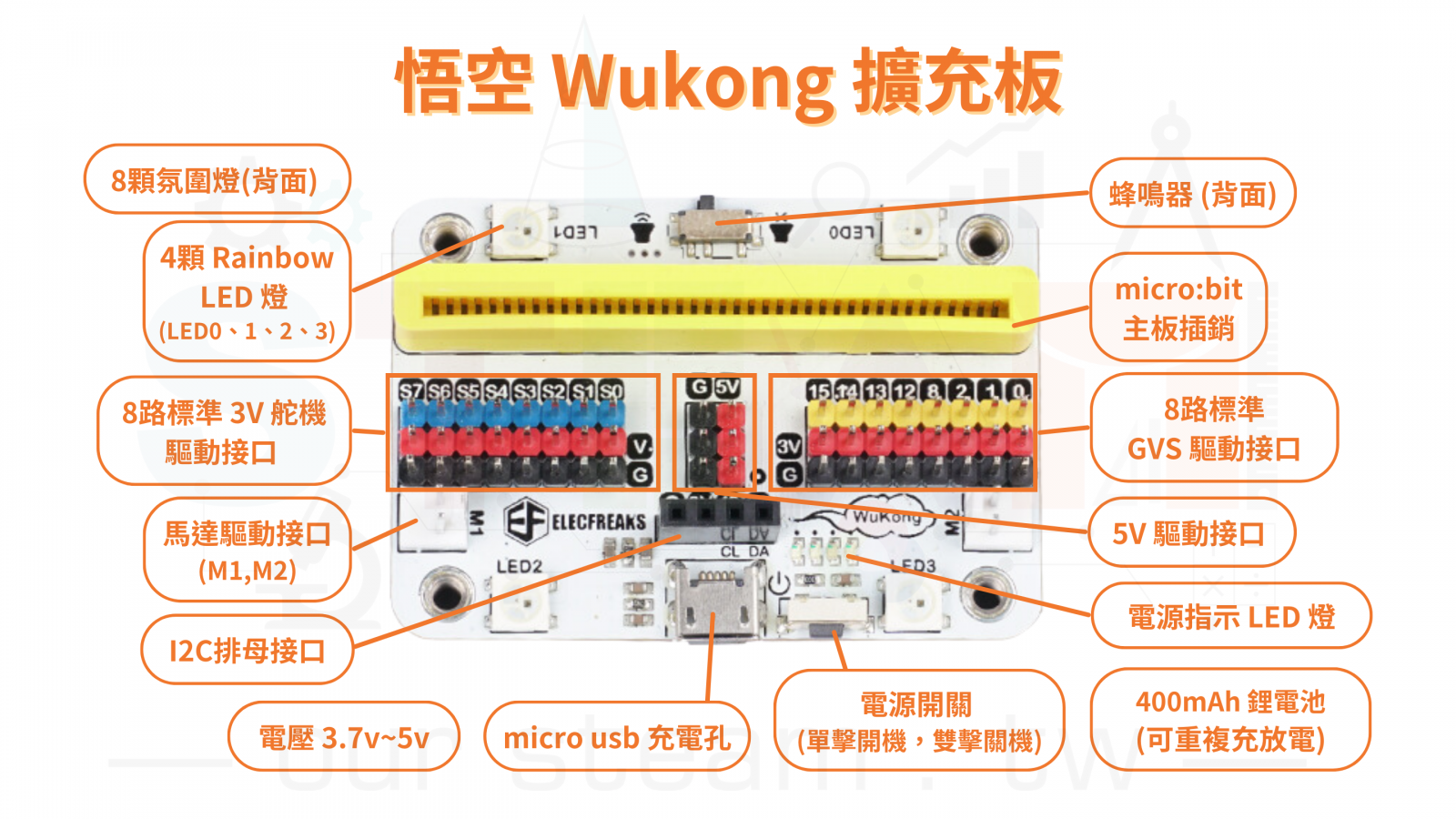
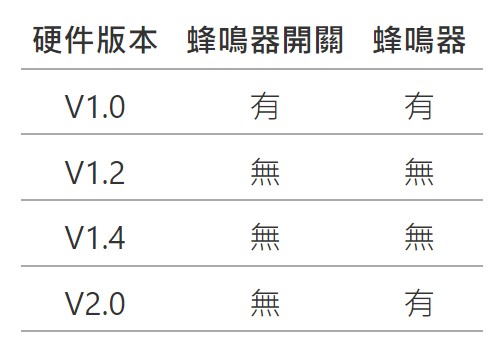
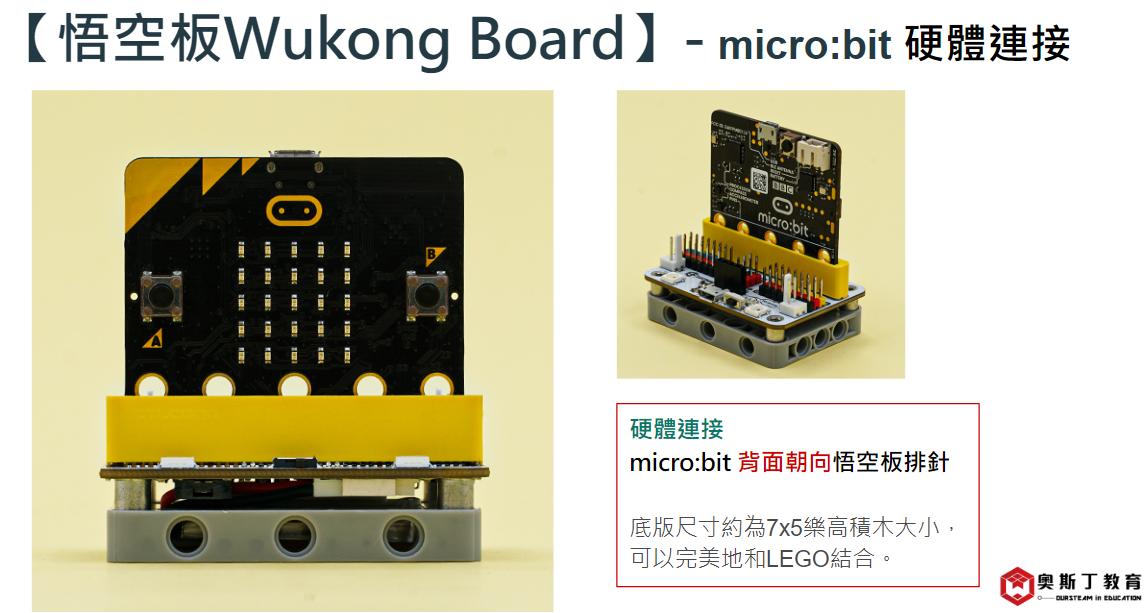
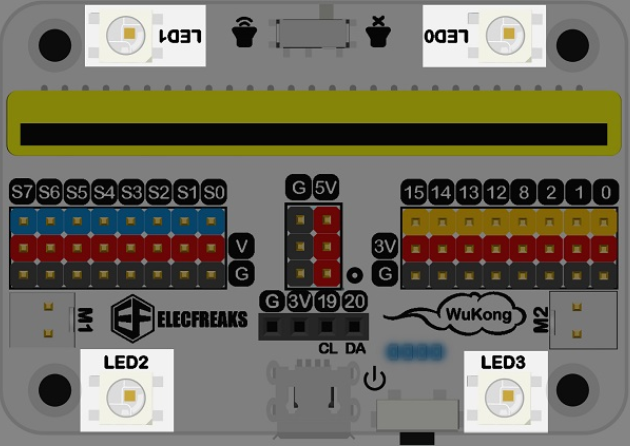
快速認識悟空版
Wukong悟空擴充板-Motor
※更多悟空版資訊
請點我
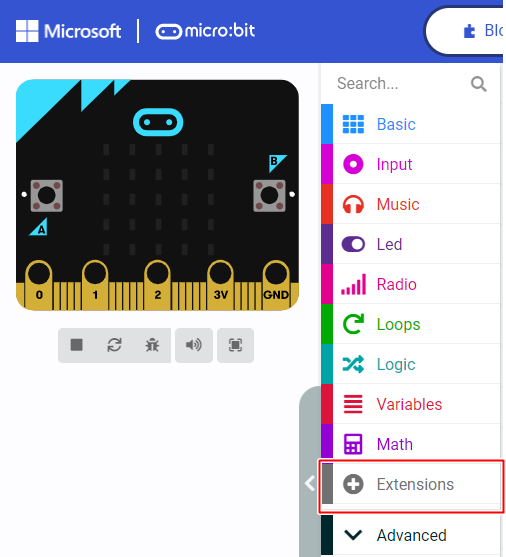
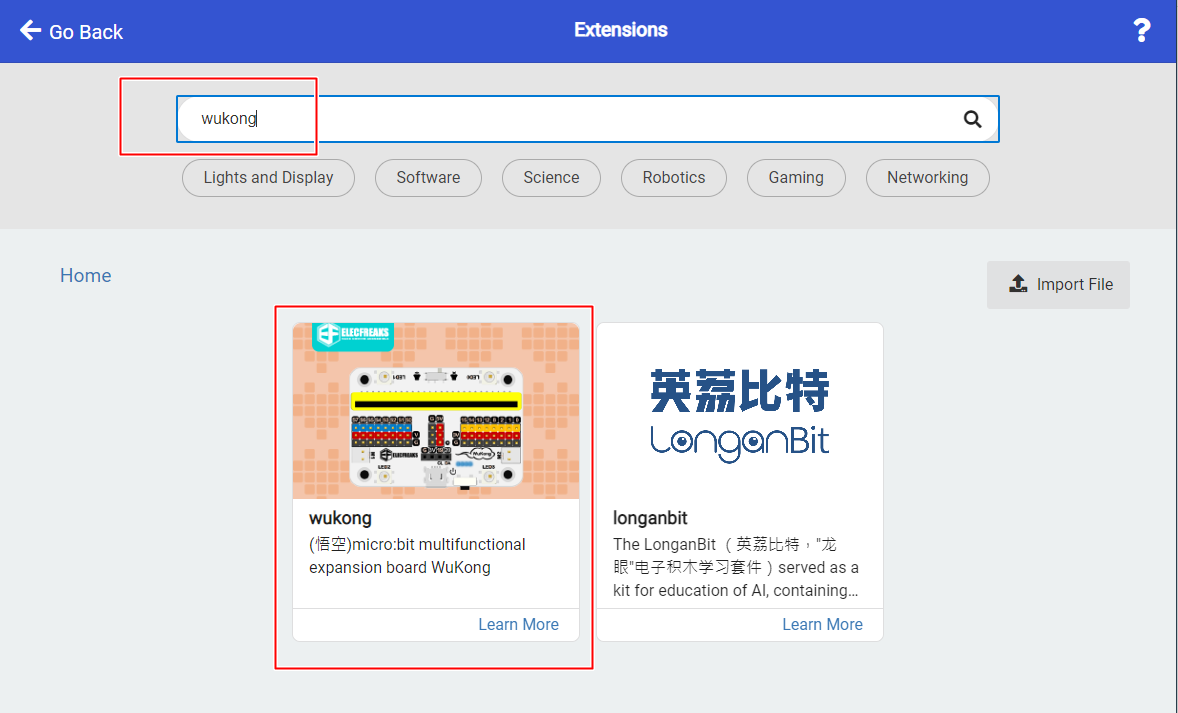
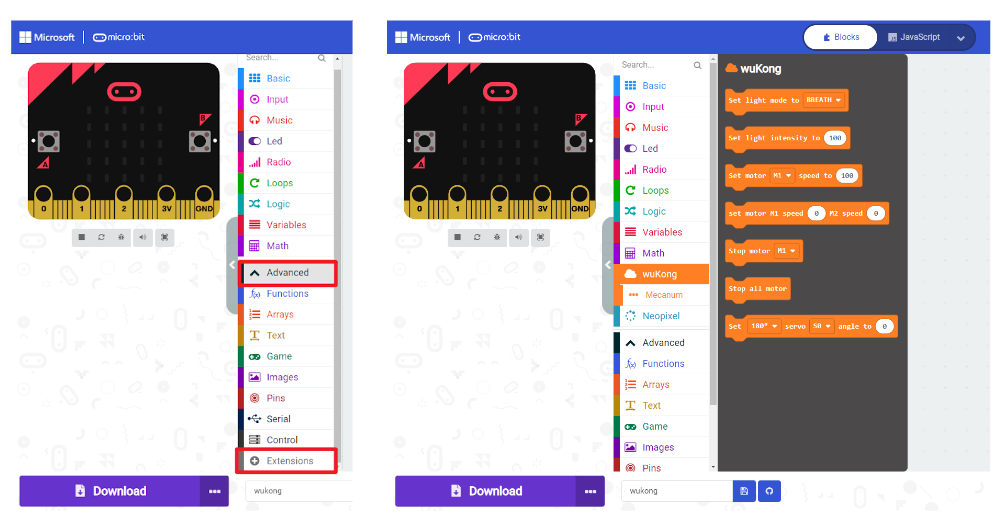
MakeCodde建立-擴充積木Wukong
點選Extensions → 輸入
Wukong
搜尋擴充積木
接著點選圖示即可下載至Makecode專案中。
學完了以上資訊!
現在起我們一起讓仿生獸動起來吧!!
仿生獸動起來【第01關】
※MakeCode模擬器基本常用項目
【Input】block
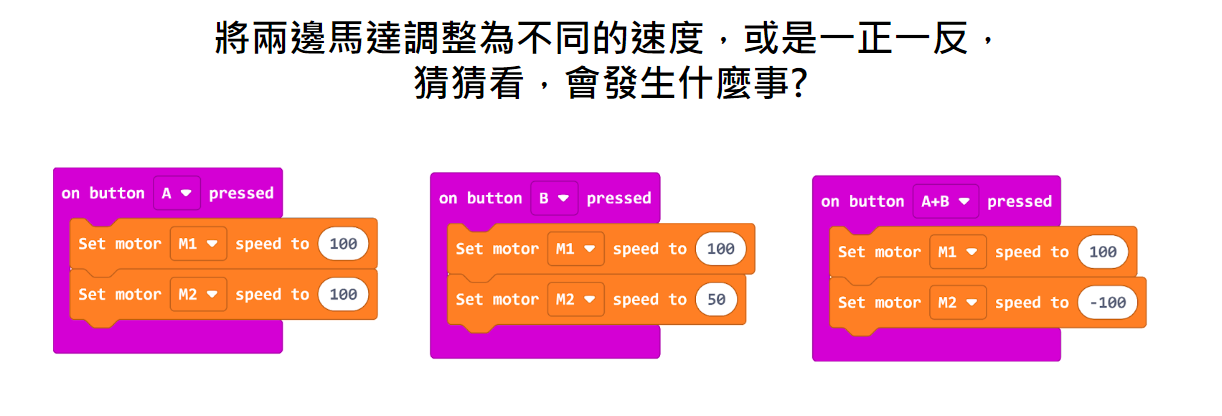
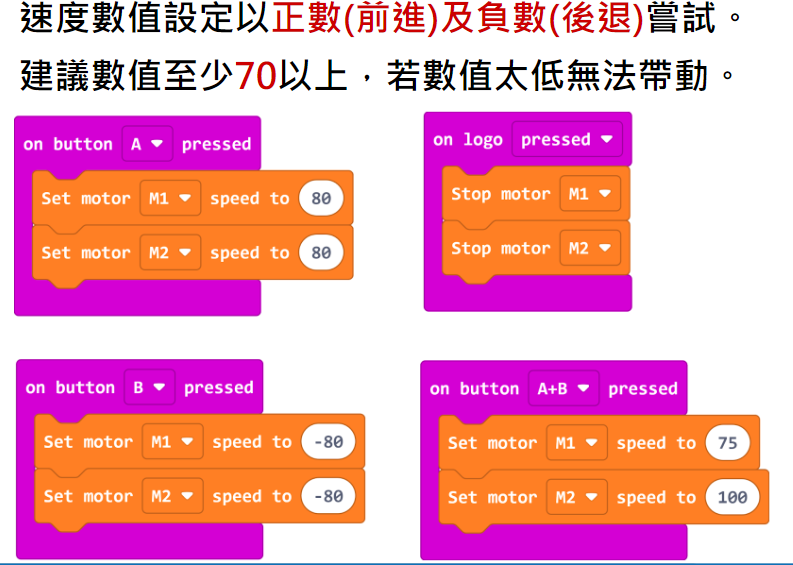
Wukong悟空擴充板_ Motor運作
Wukong悟空擴充板_ Motor前進、後退、轉彎、停止
雷切木板材料與組裝步驟Ⅱ-甲蟲
步驟一
觀察一下,
固定環兩面
的孔是否一大一小?
卸下前後輪
之後
① 將馬達盒螺絲鬆開,往後移動再重新鎖固。
② 馬達盒後方裝上後腳支架,支架要組裝到最內側。
③ 用2*6mm螺絲鎖上前腳支架
④ 馬達心軸裝上傳動曲柄
步驟二
用
6mm螺絲鎖前腳
,
8mm螺絲鎖後腳
※要保留一些活動間隙 !
前後腳使用固定環,
2*8mm螺絲
由內面往外固定
※要保留一些活動間隙 !
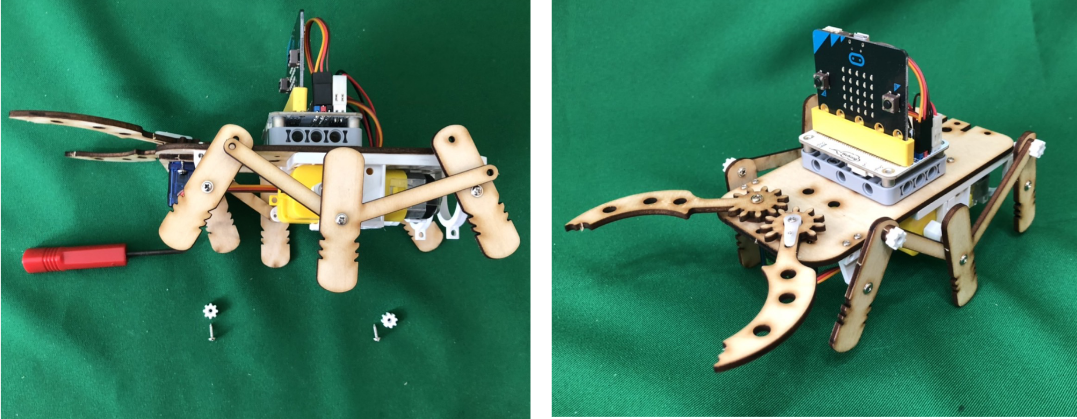
步驟三
先把後腳木棍放到中間腳的傳動曲柄最後一個孔位上,
接著把中間的腳放在最上方,再鎖入螺絲。
另一側的腳則依樣組裝,完成!
伺服馬達
※伺服馬達本身帶有電線
棕色線(GND),接G
紅色線(VCC),接V
澄色線(Signal),接1
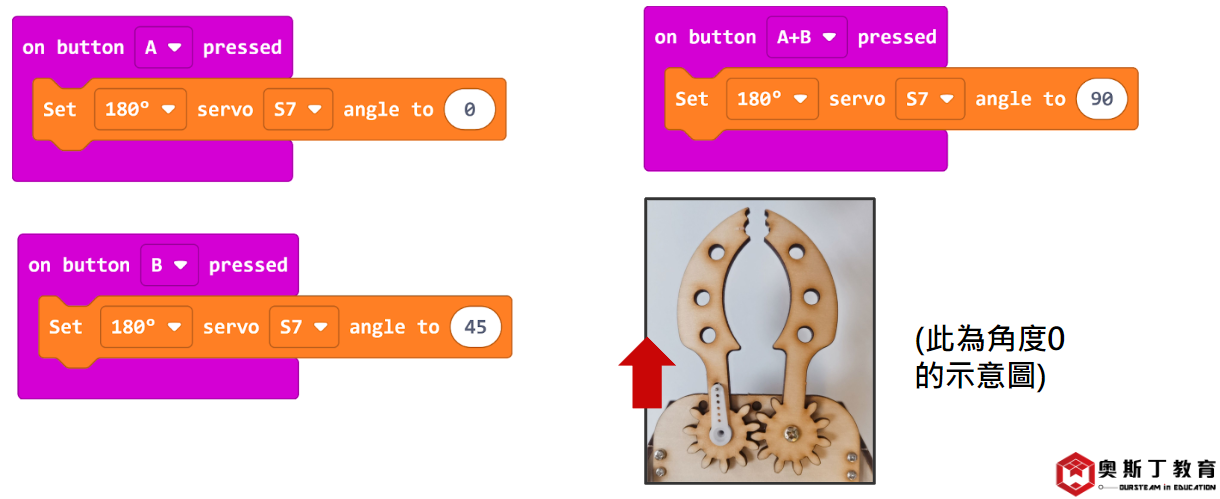
馬達轉動範圍 程式教學
※控制伺服馬達的積木在[Pins]內。
※此伺服馬達的轉動範圍是0~180度,角度設定請勿超過此範圍,以避免損壞伺服馬達。
※伺服馬達搭配三個不同擺臂,方便依據狀況使用合適的擺臂。馬達軸心的外緣有齒輪,擺臂軸心的內緣也有齒輪,將兩者的齒輪密合、壓緊。
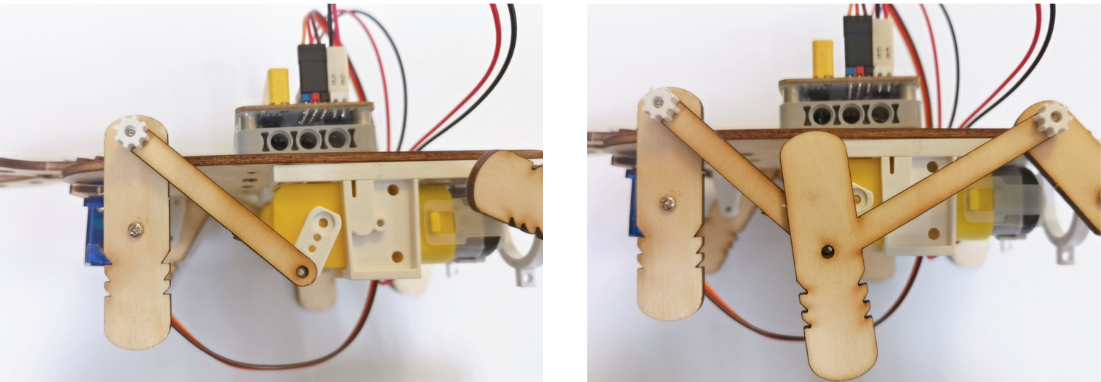
馬達轉動範圍
※馬達轉動方向可觀察出:
小角度轉到大角度時,轉動方向是逆時針
;
大角度轉到小角度時,轉動方向是順時針。
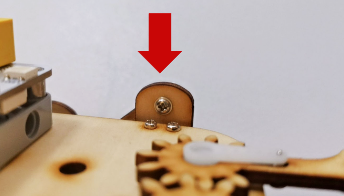
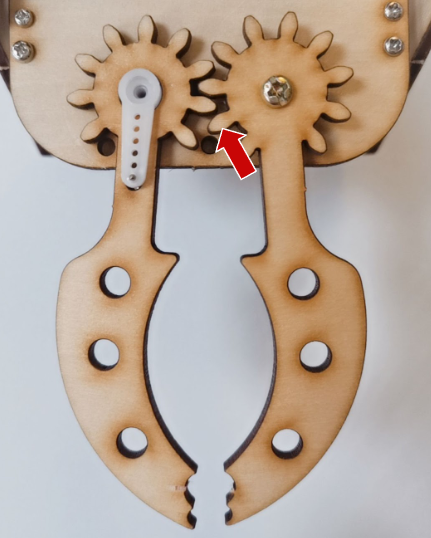
測試馬達角度
測試現階段手上的servo馬達在角度0的時候是否朝
正前方。
※請注意:左右前爪的齒輪要有交疊才能轉動哦!(如下圖)
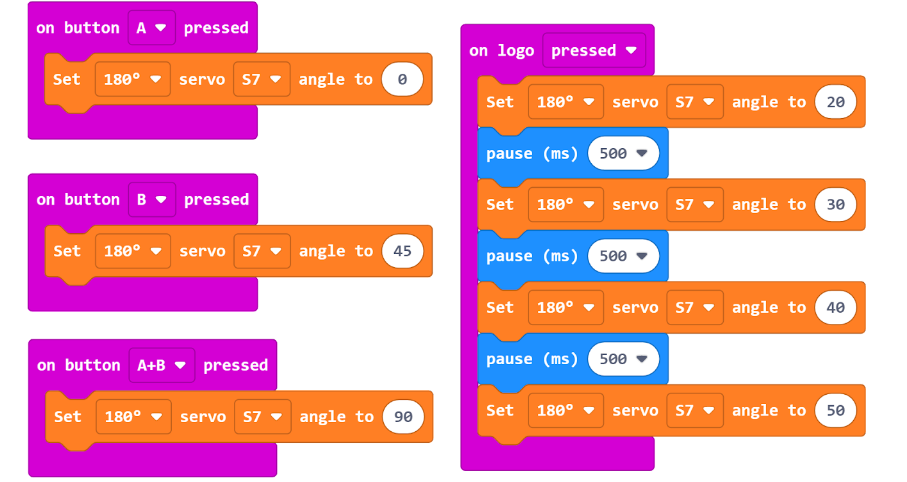
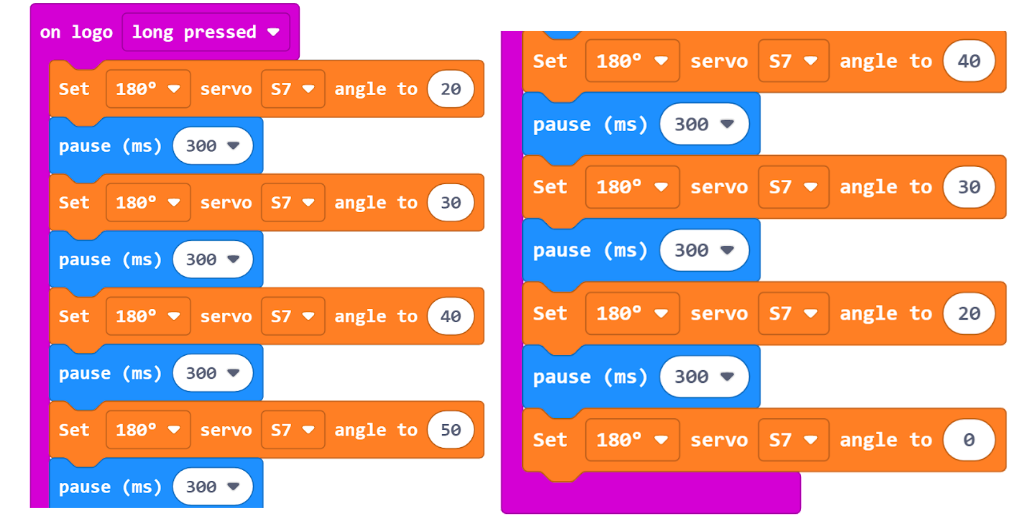
現在來試試看讓前爪移動吧!
Wukong悟空擴充板_ 夾爪程式控制
前爪開合!
仿生獸課程【第02關】
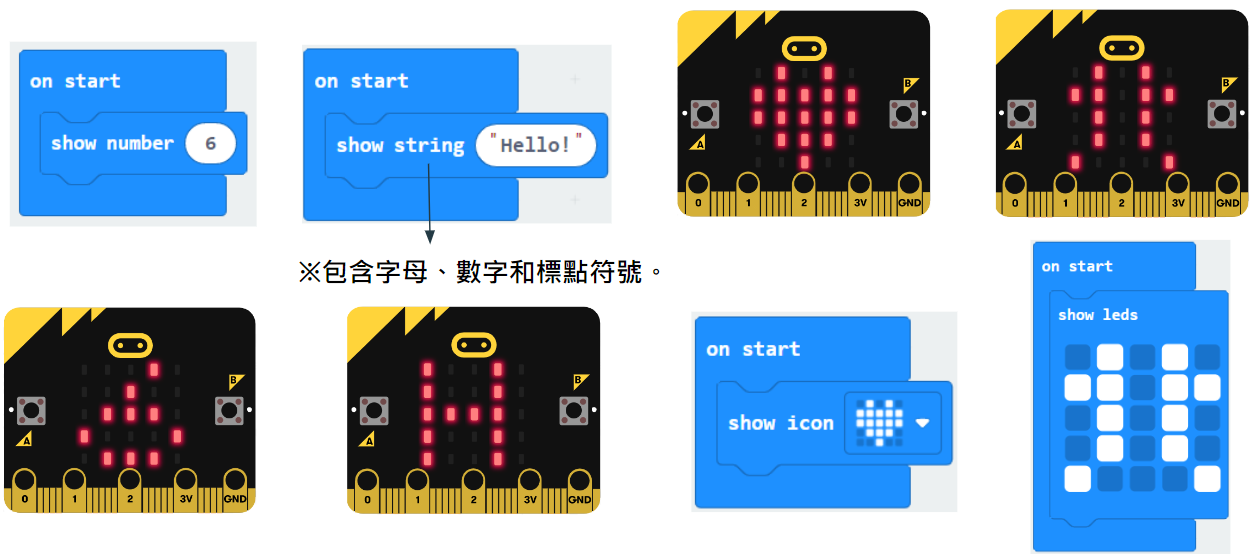
※MakeCode模擬器基本常用項目
【on start】block
【forever】block
【show icon】block
【show leds】block
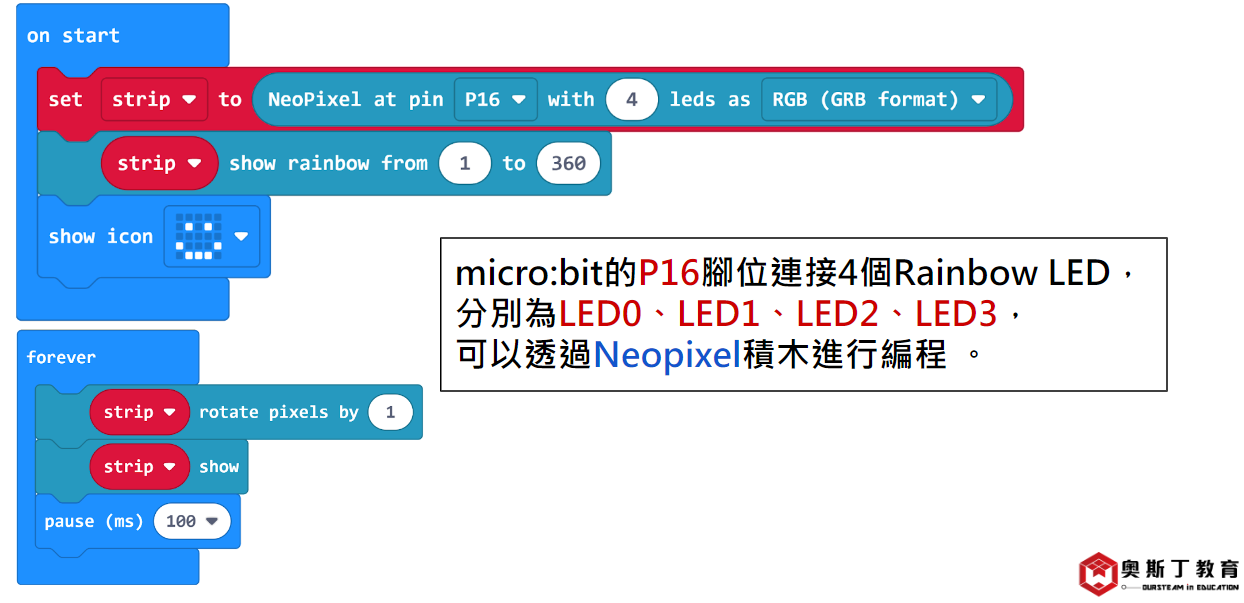
Wukong悟空擴充板_ Rainbow LEDS
micro:bit的P16腳位連接4個Rainbow LED,
分別為
LED0、LED1、LED2、LED3
,可以透過
Neopixel
積木進行編程
Wukong悟空擴充板_ 流水燈
仿生獸課程【第03關】
※MakeCode模擬器基本常用項目
【Light】block
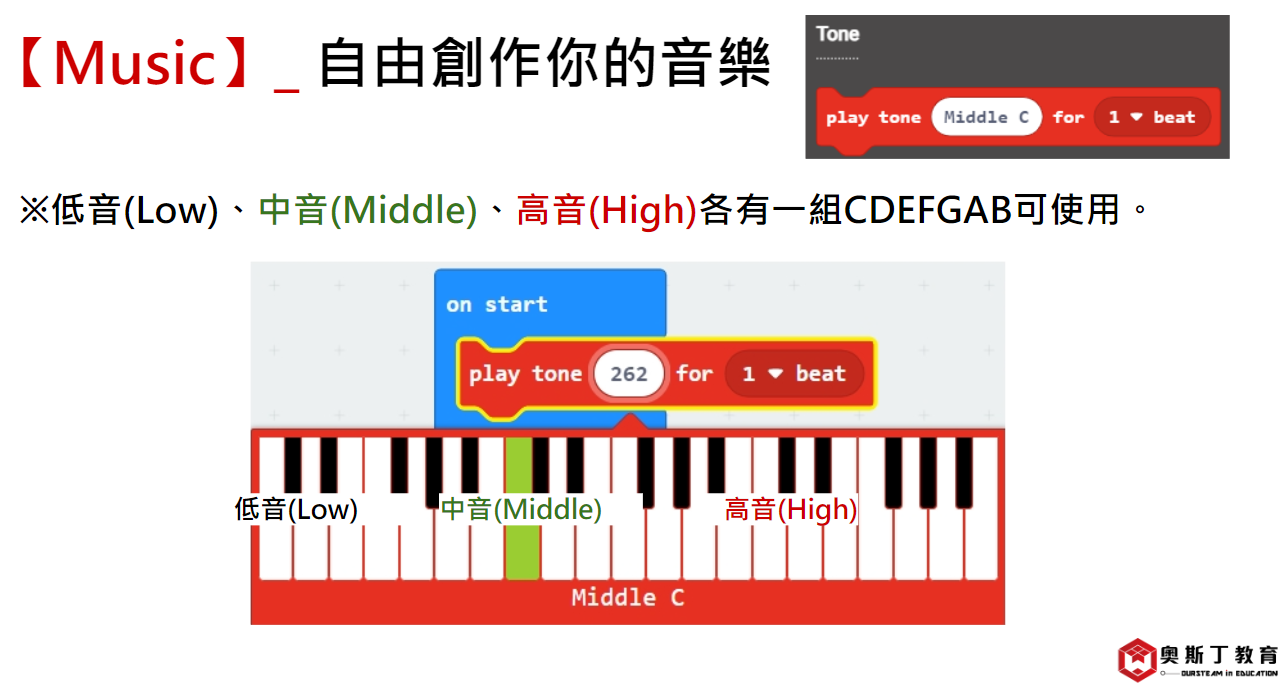
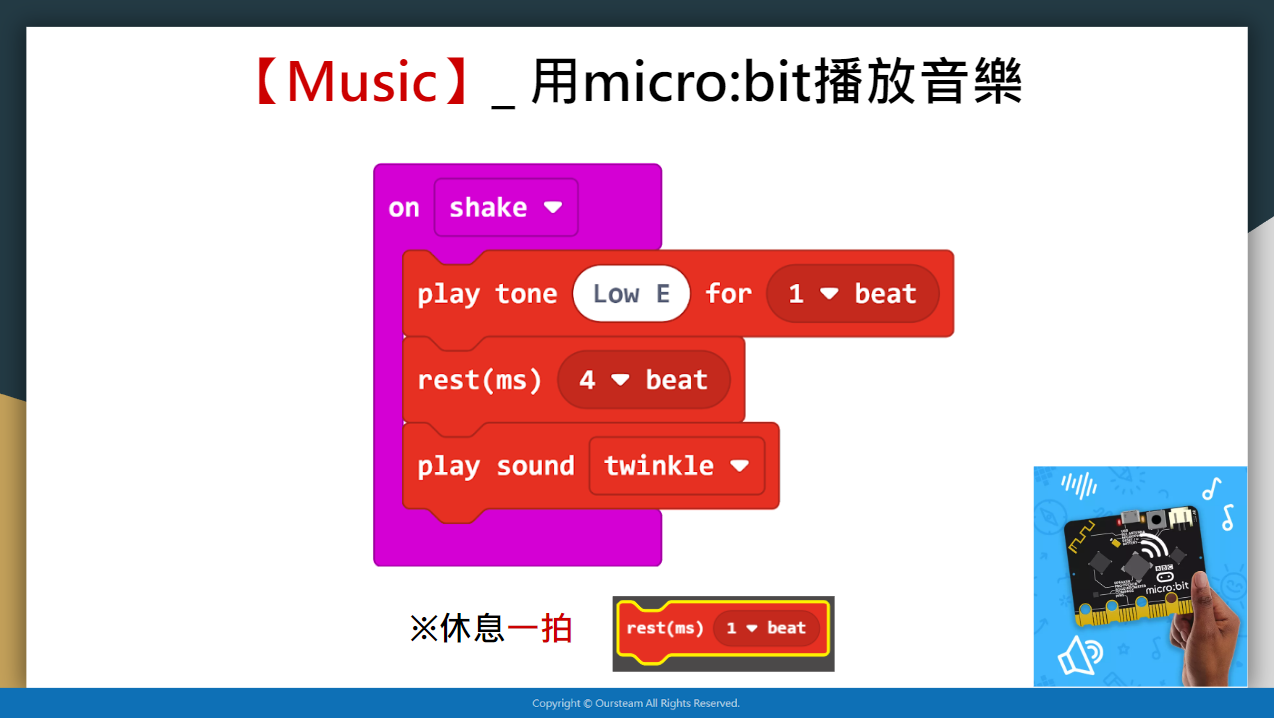
【Music】block
用micro:bit控制氣氛燈
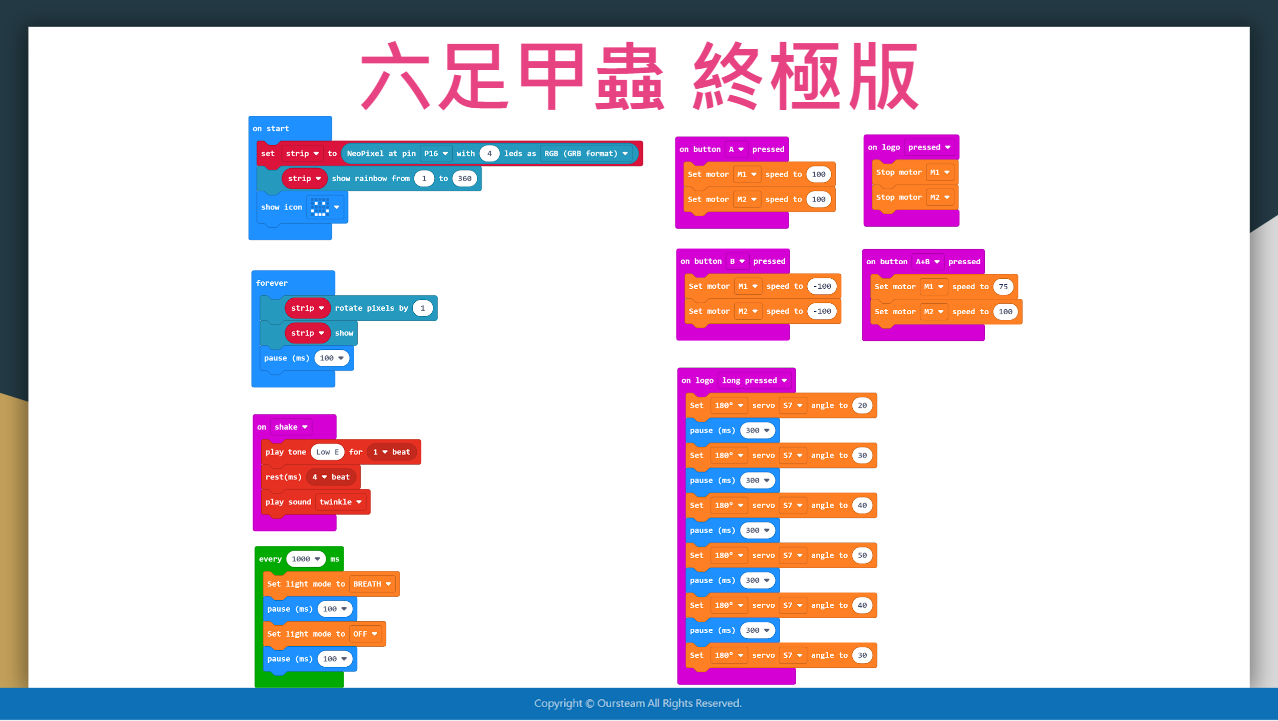
【六足甲蟲 聲光行走秀 START!】
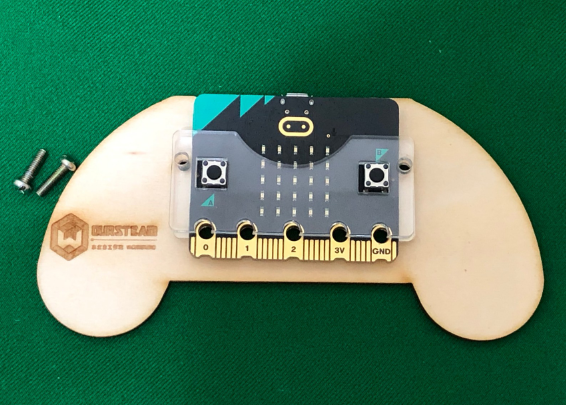
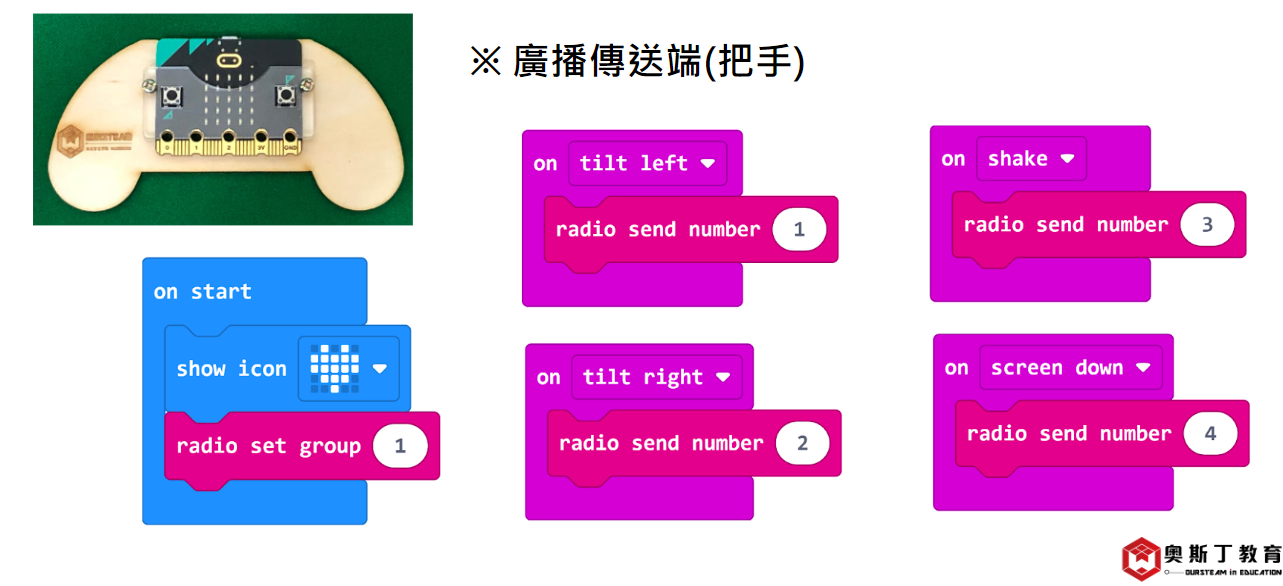
BBC micro:bit
木製創意手把
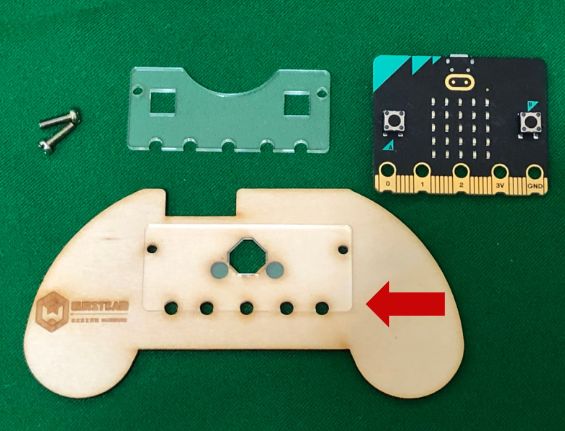
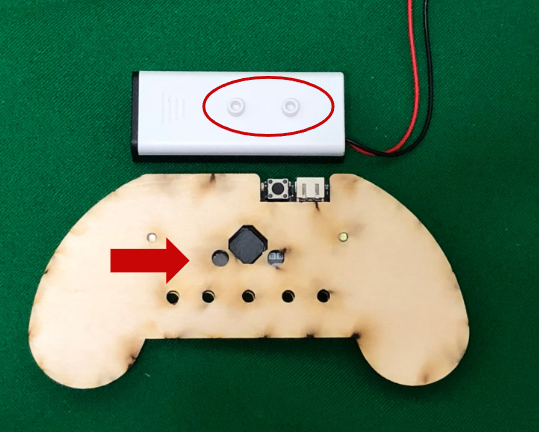
步驟一
堆疊上蓋板
零件清單:
1.手把底板
2.背板
3.上蓋板
4.螺絲釘2顆
5.具兼容樂高結合AAA*2電池盒 PH2.0接頭
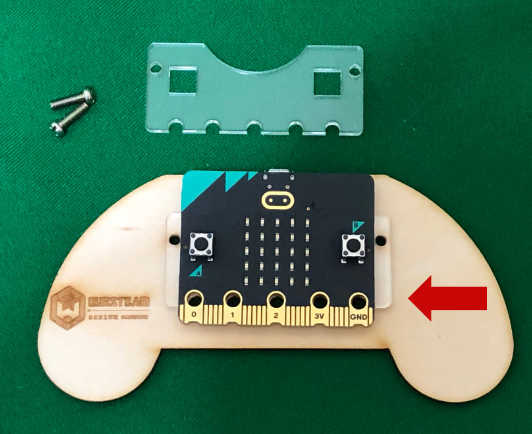
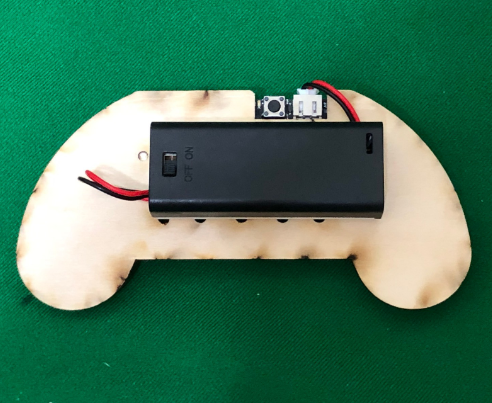
步驟二
將背板放置於手把底板上,對位螺絲孔
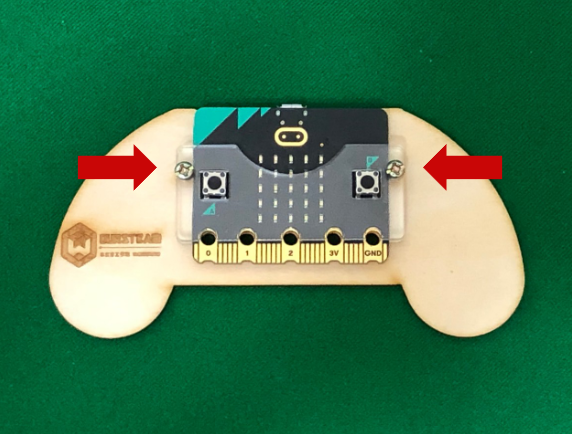
堆疊micro:bit板,對位螺絲孔
鎖上螺絲釘
轉至背面,蜂鳴器留出音孔,以及兼容樂高結合孔。
具兼容樂高結合AAA*2電池盒,直接扣結於手把,PH2.0接頭連接micro:bit電源插座。
仿生獸課程【第04關】
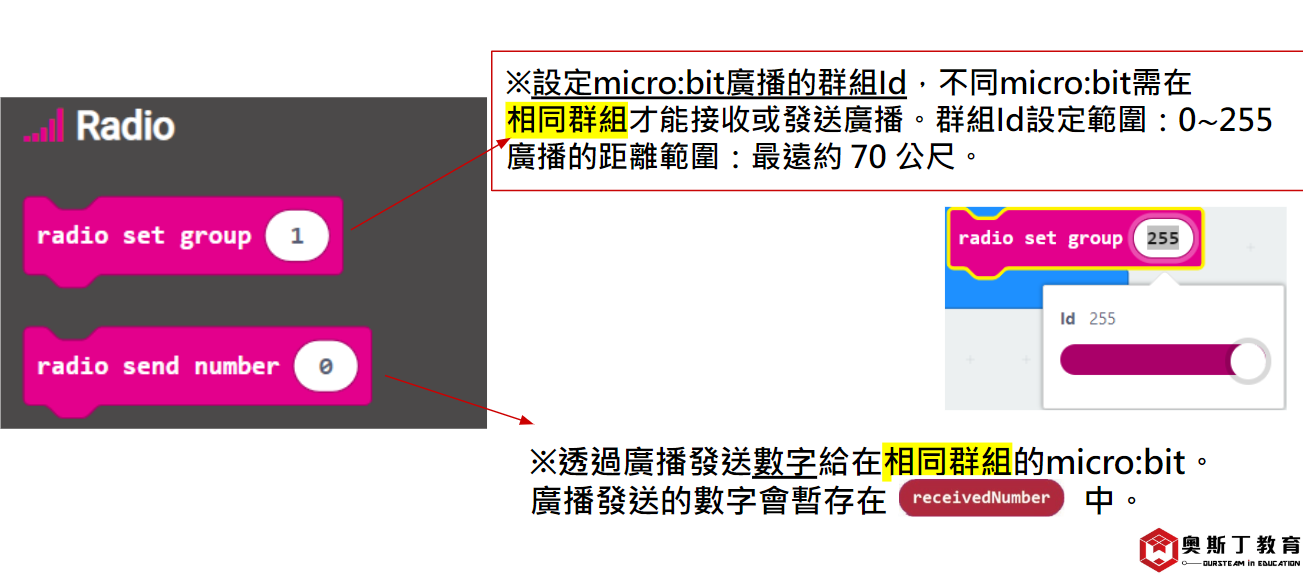
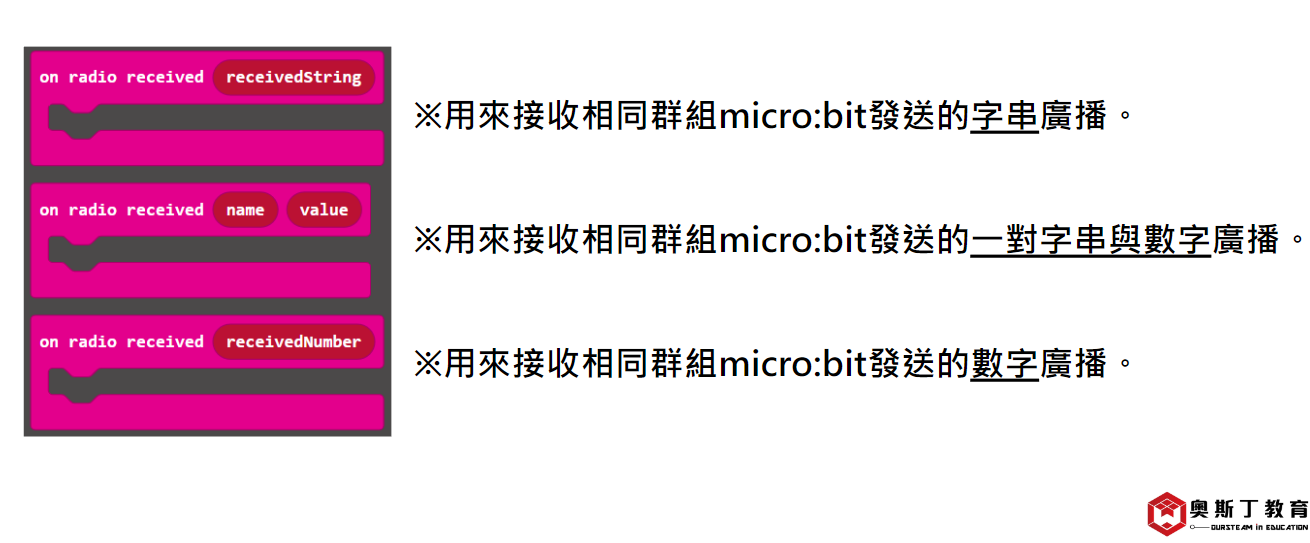
※MakeCode模擬器基本常用項目
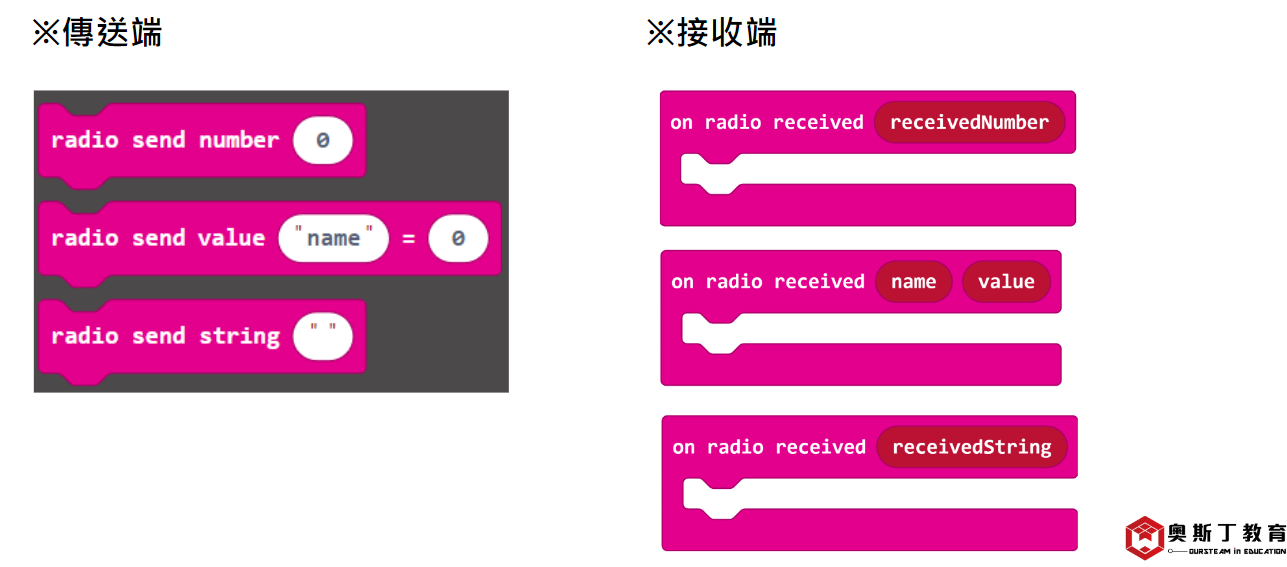
【Radio】block
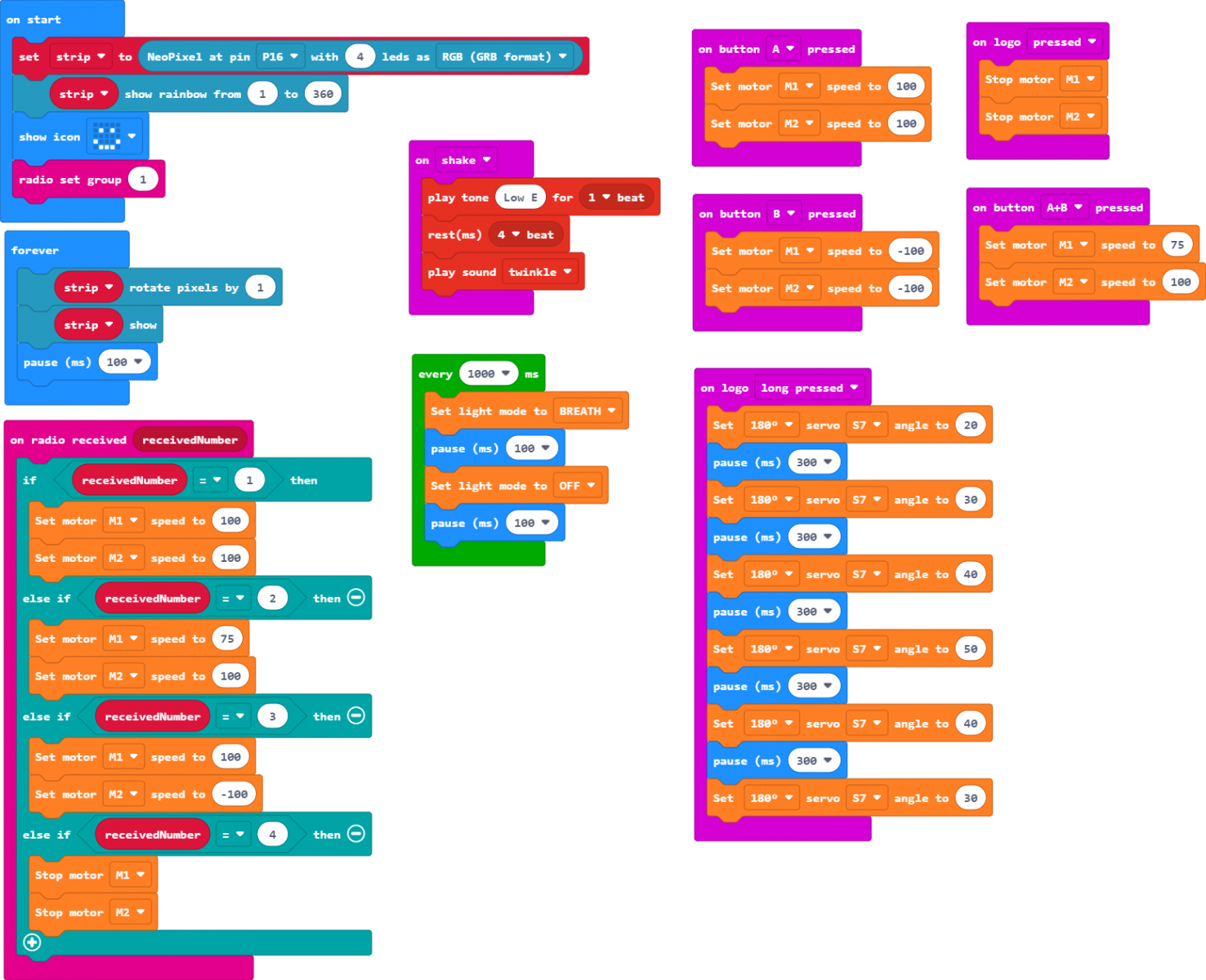
兩片micro:bit廣播控制_ Motor前進、後退、轉圈、停止
廣播接收端(甲蟲)
【六足甲蟲 手把控制 START!
】
仿生獸課程【第05關】
※MakeCode模擬器基本常用項目
【Input】block - sound level / light level
【Show icon】block
【Variables】block -mode(變數可自行設定)
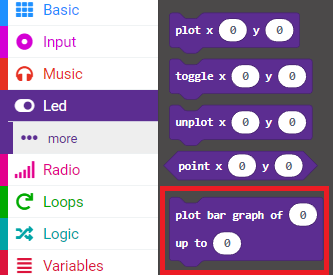
【Led】block - bar graph
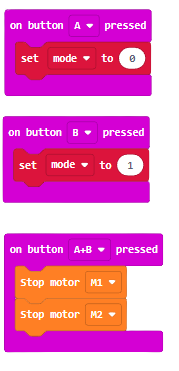
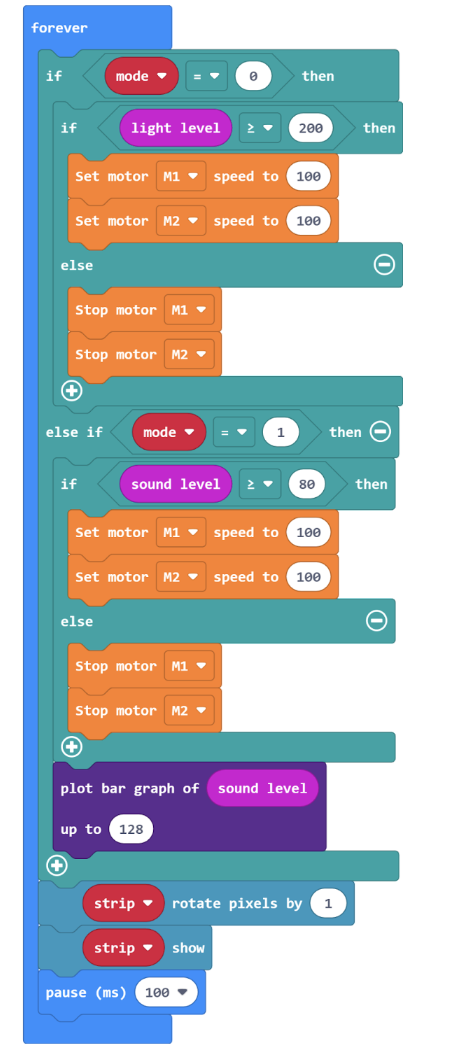
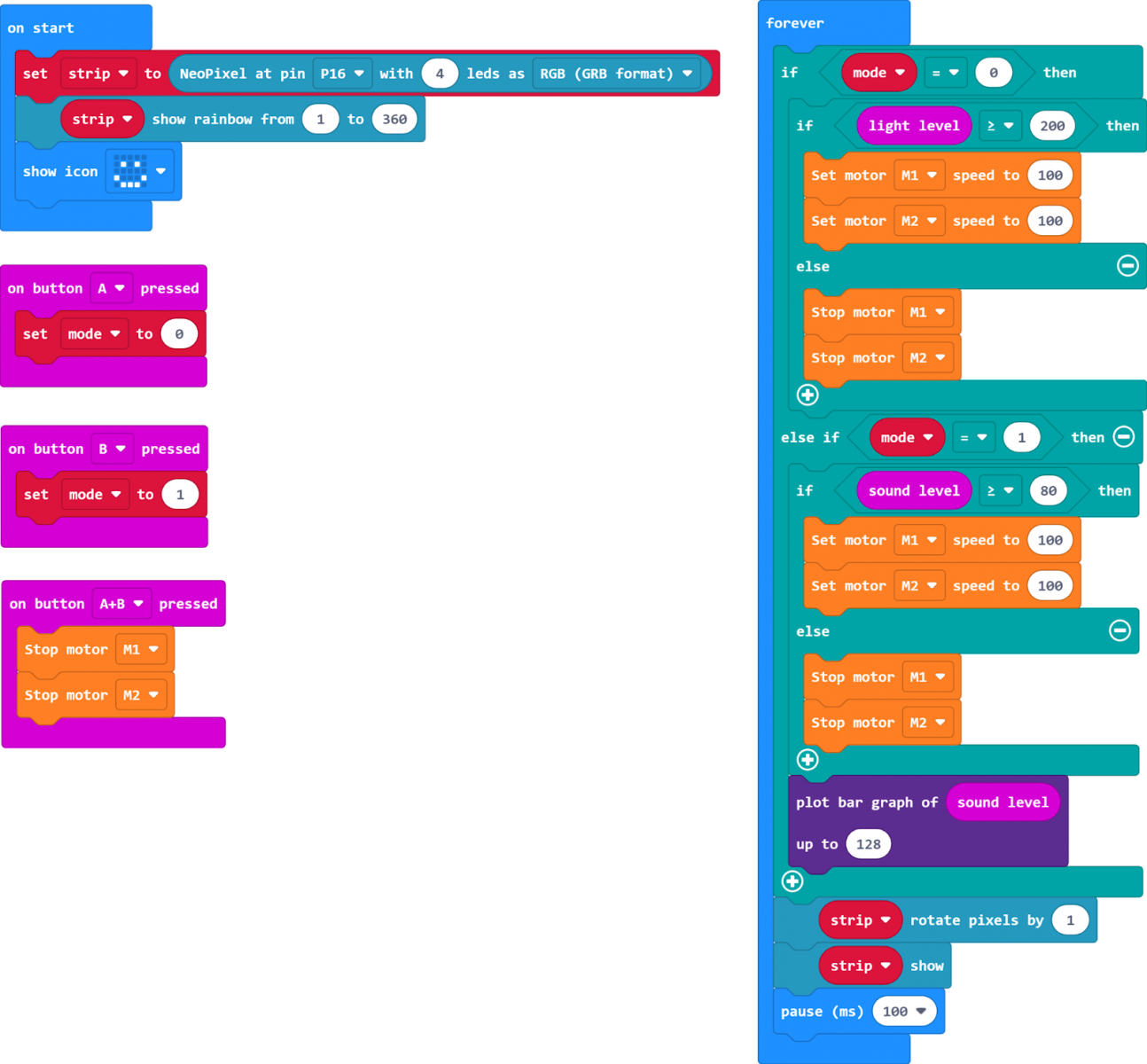
用micro:bit進行聲光感測
按A鍵------mode值設為0(數值可自行設定)
按B鍵------mode值設為1(數值可自行設定)
按AB鍵
----- 停止
►當mode值=0時,啟動光感應,當光線值>200,往前行走,否則停止。
►當mode值=1時,啟動聲感應,當聲音>80,往前行走,否則停止。
※可利用
【
Led】 block
顯示聲量圖示
【甲蟲
】_
聲光感測
【六足甲蟲 光感應 START!
】
【
六足甲蟲
聲感應 START!
】
延伸補充
手機藍芽APP控制仿生獸
返回列表
電話:04-2375-3535
傳真:04-2256-9949
統編:90386785
E-mail:service@oursteam.com.tw
LINE ID:@oursteam
學校機關報價
經銷通路報價
客製產品規劃
師資培訓課程
教師研習辦理
社團營隊活動
關於我們
代理商品
教學資源
最新消息
聯絡我們
購物說明
訂單查詢
付款回覆
Copyright © 奧斯丁國際 All Rights Reserved.
 電話:04-2375-3535
電話:04-2375-3535