PARENTS
親子
TEACHERS
教師
GOODS
產品
OUR ESG
社會責任
CONTACT
聯絡我們
NEWS
最新消息
首頁
教學資源
智能小車系列
TPBot 智能汽車機器人
教學資源
2021/02/19
TPBot 智能汽車機器人
1.1TPBot簡介
TP Bot是一款用於micro:bit的智能編碼車。它的預設功能不需要micro:bit,因此可以視為是汽車機器人玩具。它也可以同時用作教學輔助工具,您可以透過micro:bit對其進行編程,也可以對其他組件和樂高積木進行擴展以培養孩子的想像力和創造力。
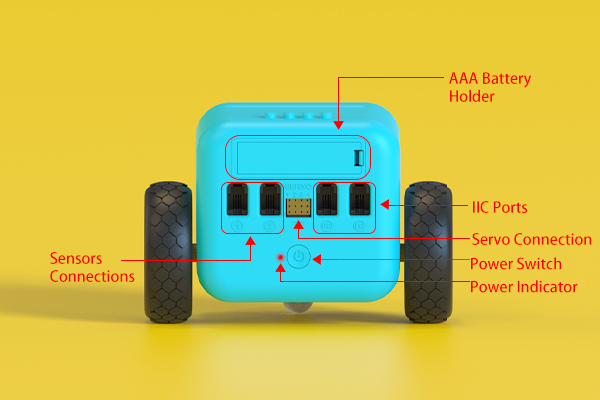
1.2實體圖片
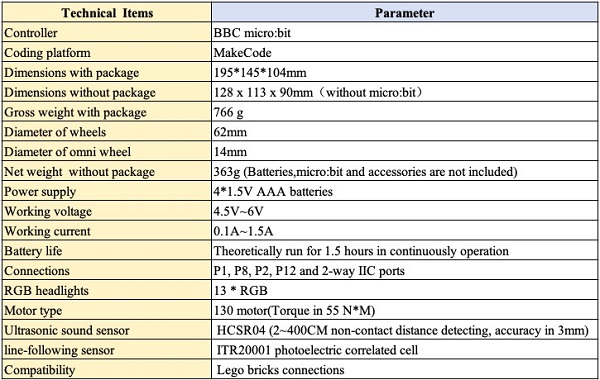
1.3參數
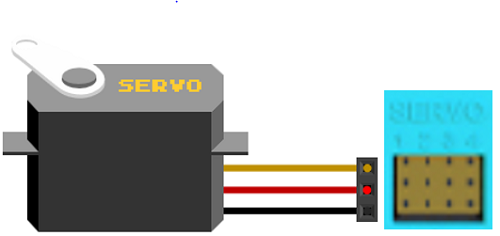
1.5連接示意圖
注意:與伺服器的連接應垂直插入,且接地線在底部。
1.6用戶指南
即使沒有micro:bit,TPBot也可以運行,以下是說明:
按下電源按鈕進入待機模式,此時電源指示燈亮起,並且LED呈現綠色呼吸狀態。
在待機模式下,按電源按鈕進入循跡和避障模式,此處同時以彩虹模式使LED發亮。
在其循跡和避障模式下,前燈變為紅色,並且如果檢測到障礙物,則停止移動。
在其循跡和避障模式下,按電源按鈕可返回待機模式。
無論是在循跡、避障模式或是在待機模式下,雙擊電源按鈕都可以關閉TPBot的電源。
1.7零件內容
TPBot智能汽車機器人* 1
貼紙* 1
地圖* 1
手冊* 1
電池* 4
2.案例01:運行控制
2.1目的
學習透過編程來控制TPBot的移動。
2.2材料
TPBot智能汽車機器人* 1
2.3軟體
Microsoft MakeCode
2.4程式設計
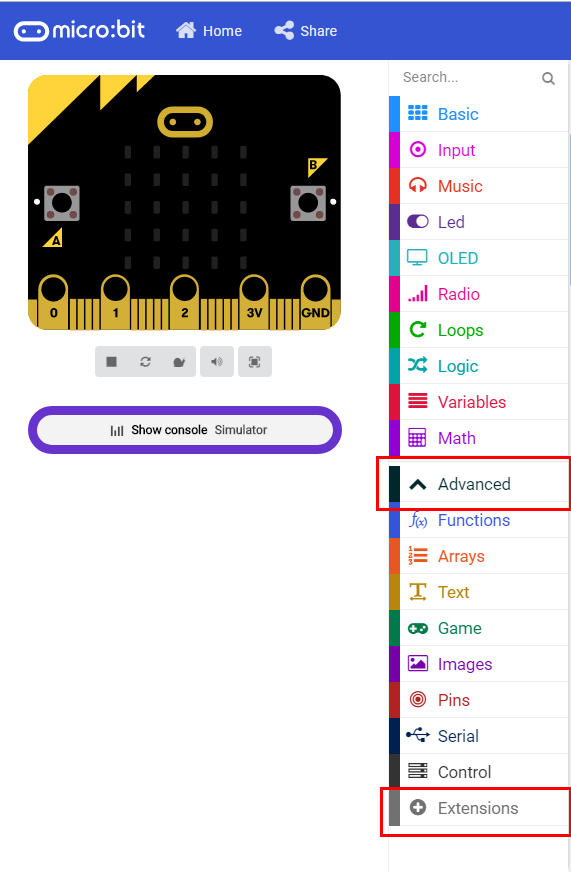
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本A
將TPBot的兩個車輪速度都設置為100並拖曳到“當啟動時”。
連結網址
https://makecode.microbit.org/_0r5C5L029L9m
2.5結論
TPBot會持續前進。
##範本B
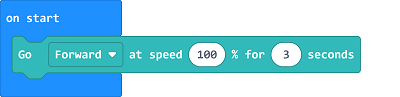
將前進的速度設置為100及持續3秒,並拖曳到“當啟動時”。
連結網址
https://makecode.microbit.org/_XXH3yP66oRRp
2.6結論
TPBot會全速前進3秒後再停止。
##範本C
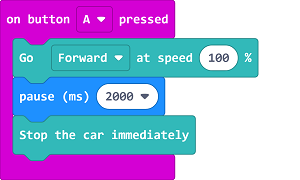
將前進的速度設置為100,並將暫停設置為2000ms,接著放置一個將車子立即停止的指令,並將前述設定拖曳到“按下A鍵時”。如下圖所示:
連結網址
https://makecode.microbit.org/_6i4awR07MA7E
2.7結論
按下A鍵時,TPBot會全速前進2秒後再停止。
3.案例02:燈光控制
3.1目的
學習透過編程來控制LED燈的顏色。
3.2材料
TPBot智能汽車機器人* 1
3.3軟體
Microsoft MakeCode
3.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本A
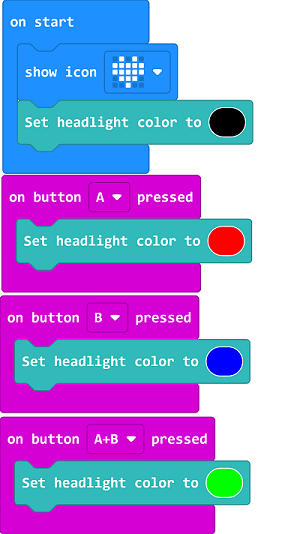
當啟動時,micro:bit顯示一個愛心圖案,並且LED前燈為黑色。
按下A鍵,使LED前燈顯示紅色。
按下B鍵,使LED前燈顯示為藍色。
按下A + B鍵,使LED前燈顯示為綠色
連結網址
https://makecode.microbit.org/_0RM5AJgos7C5
3.5結論
使用按鍵控制LED前燈的顏色。
按下A鍵,使LED前燈顯示紅色。
按下B鍵,使LED前燈顯示為藍色。
按下A + B鍵,使LED前燈顯示為綠色。
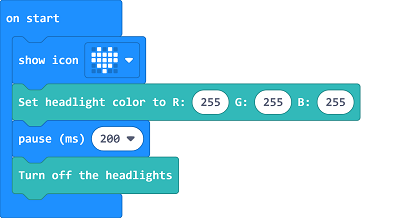
##範本B
當啟動時micro:bit將顯示愛心圖案,而LED前燈顯示為紅色並暫停0.2秒鐘,然後關閉LED前燈。
連結網址
https://makecode.microbit.org/_P5cJ7oV1664J
3.6結論
當啟動時micro:bit將顯示愛心圖案,並且TPBot的LED前燈顯示為白色2秒鐘,然後關閉。
4.案例03:循跡
4.1目的
學習透過編程來使TPBot沿著黑線驅動。
4.2材料
TPBot智能汽車機器人* 1
4.3軟體
Microsoft MakeCode
4.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
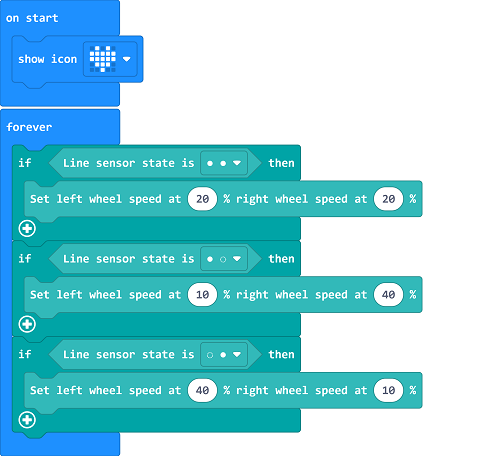
##範本
判斷循跡傳感器的狀態:如果在左側檢測到黑色,則將左輪的速度設置為10、右輪的速度設置為40;如果在右側檢測到黑色,則將左輪的速度設置為40、右輪的速度設置為10。
連結網址
https://makecode.microbit.org/_4WML7wLL5DDJ
4.5結論
TPBot沿著黑線驅動。
4.7常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
5.案例04:避障駕駛
5.1目的
學習透過編程來使TPBot自動避開障礙物。
5.2材料
TPBot智能汽車機器人* 1
5.3軟體
Microsoft MakeCode
5.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
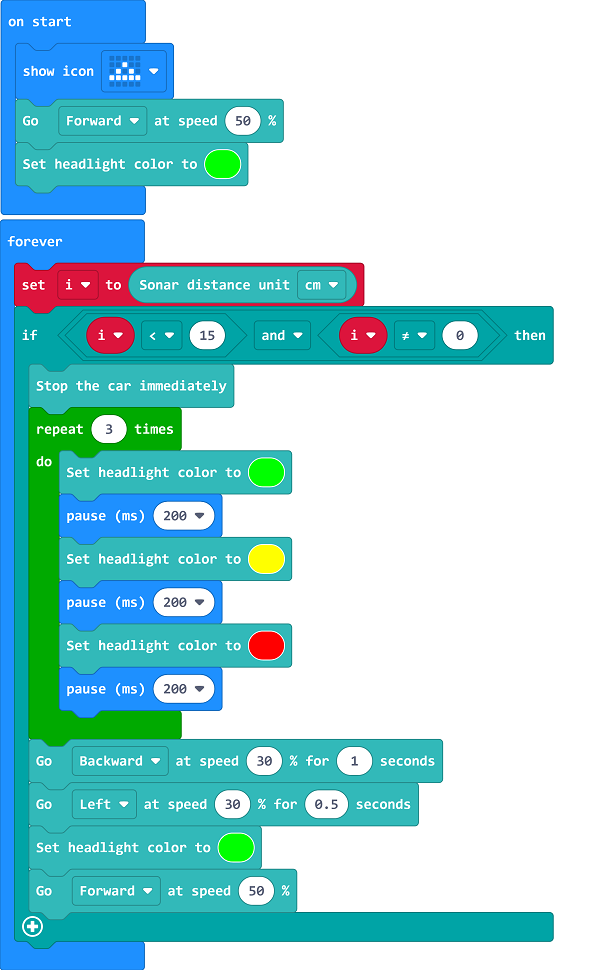
##範本
設置一個三角形圖案,將TPBot前進的速度設置為50;LED前燈設置為綠色。
將TPBot到障礙物中的距離變數設置在重複執行的指令中,判斷如果i<15且i≠0是否正確,如果是,將TPBot設置為立即停止並且前燈閃爍3次。
將其倒退的速度設置為30%並執行1秒,左轉的速度設置為30%並執行0.5秒,最後將前燈設為綠色,前進的速度設置為50%。
連結網址
https://makecode.microbit.org/_9A0XzETTzA54
5.5結論
打開TPBot的電源以使其前進,如果檢測到障礙物,它將立即停止,並且前燈閃爍3次,然後倒退後會向左轉,接著以前燈呈現綠色的狀態繼續前進。
5.7常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
6.案例05:自動開燈
6.1目的
學習透過編程來使TPBot自動在黑暗中打開燈光。
6.2材料
TPBot智能汽車機器人* 1
6.3軟體
Microsoft MakeCode
6.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
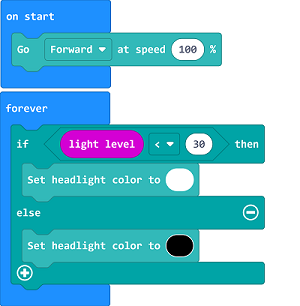
##範本
將前進的速度設置為100。
判斷目前光的強度是否低於設定值。如果是,則將前燈設置為白色;如果不是,就設置為黑色。
連結網址
https://makecode.microbit.org/_4Wm85b3K4ikU
6.5結論
啟動TPBot以向前行駛,並在進入黑暗/明亮區域時自動打開/關閉大燈。
7.案例06:隨機駕駛
7.1目的
學習透過編程來使TPBot隨機駕駛。
7.2材料
TPBot智能汽車機器人* 1
7.3軟體
Microsoft MakeCode
7.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
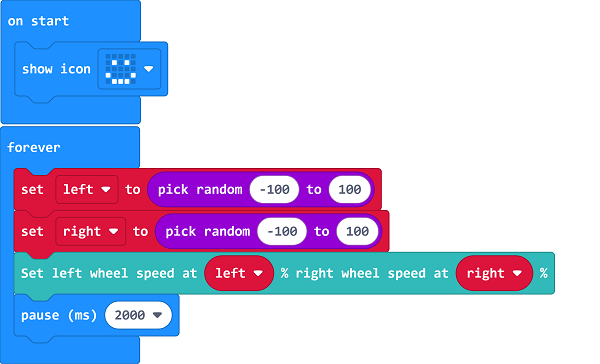
##範本
在micro:bit上放置一個笑臉圖案。
將左右輪的速度設置為-100〜100之間的任意值,並暫停2秒鐘。
連結網址
https://makecode.microbit.org/_PHzL9LUCL4cv
7.5結論
micro:bit顯示笑臉圖案,並且兩個輪子的速度每兩秒隨機變化一次。
8.案例07:警察來了
8.1目的
學習透過編程來使TPBot變成一台警車。
8.2材料
TPBot智能汽車機器人* 1
8.3軟體
Microsoft MakeCode
8.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
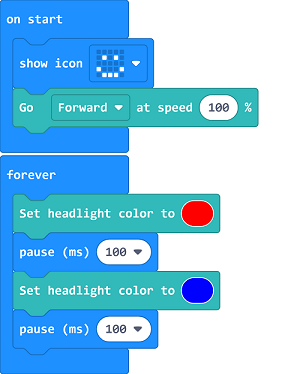
##範本
在micro:bit上放置一個笑臉圖案,並將前進的速度設置為100%。
在重複執行的指令中,將前燈設置為紅色、暫停100ms;然後再將前燈設置為藍色、暫停100ms。
連結網址
https://makecode.microbit.org/_6AT0J1Yx99rm
8.5結論
TPBot啟動後將向前行駛,且前燈交替顯示紅色和藍色。
9.案例08:在固定的點停車
9.1目的
學習透過編程來使TPBot在固定的點停車。
9.2材料
TPBot智能汽車機器人* 1
9.3軟體
Microsoft MakeCode
9.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
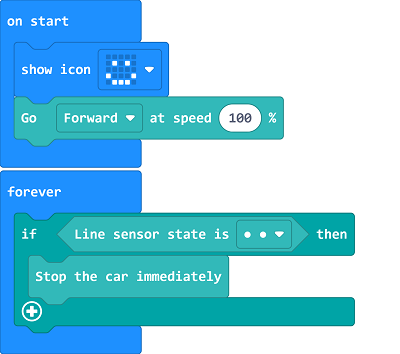
##範本
在micro:bit上放置一個笑臉圖案,並將前進的速度設置為100%。
在重複執行的指令中,設置判斷循跡感測器的狀態,如果檢測到黑線,則立刻將車子停下來。
連結網址
https://makecode.microbit.org/_Jda4MkM8gCsf
9.5結論
啟動後在micro:bit上會顯示一個已設置的圖案,而TPBot將向前行駛,直到兩個傳感器都檢測到黑線後才會停止。
10.案例09:尋找光線
10.1目的
學習透過編程來使TPBot往光線前進。
10.2材料
TPBot智能汽車機器人* 1
10.3軟體
Microsoft MakeCode
10.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本
在當啟動時的指令中,將前燈設置為白色。
在重複執行的指令中,設置判斷光線強度是否超過設定值,如果是,則將TPBot設值為前進。如果不是,則將TPBot設值為向左轉。
連結網址
https://makecode.microbit.org/_by81v67kf8Ef
10.5結論
如果檢測到的光線強度超過設定值,則TPBot將繞圈旋轉或向前移動。
10.7常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
11.案例10:防墜落的TPBot
11.1目的
將黑色膠紙黏貼到桌子的邊緣,將編程設計為如果檢測到黑色,則使TPBot倒轉,接著繼續前進。
11.2材料
TPBot智能汽車機器人* 1
11.3軟體
Microsoft MakeCode
11.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
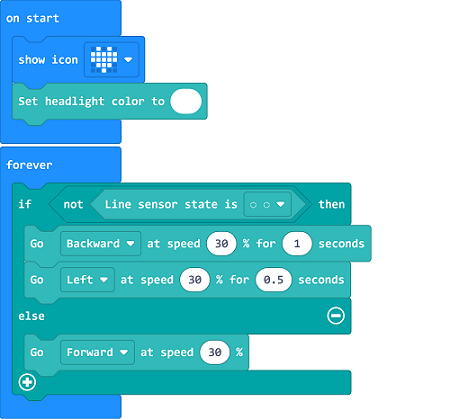
##範本
將micro:bit顯示的圖案設置為愛心,並將前燈設置為白色。
在重複執行的指令中.設置判斷是否檢測到黑線的指令,如果是,則將TPBot的倒轉速度設置為30%並持續1秒,接著以相同的速度左轉0.5秒。如果不是,則以30%的速度前進。
連結網址
https://makecode.microbit.org/_dtPhXL3XxTJC
11.5結論
開啟micro:bit後會顯示一個圖案,然後TPBot將向前移動且前燈為白色。如果檢測到黑線,TPBot就會倒轉,然後向左轉以繼續移動。
11.7常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
12.案例11:以固定距離跟隨
12.1目的
使用編程將TPBot設計為以固定距離跟隨另一輛車。
12.2材料
TPBot智能汽車機器人* 1
12.3軟體
Microsoft MakeCode
12.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本
在micro:bit顯示屏上設置一個圖案。
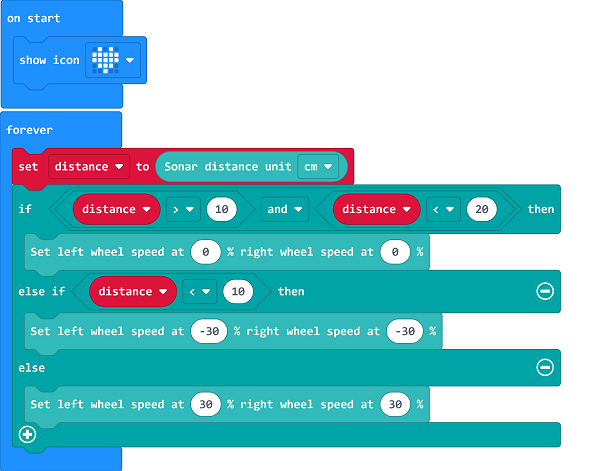
在重複執行的指令中,將數值設定為TPBot與前車的距離,並判斷該距離是否在10到20之間,如果是,則將兩個車輪的速度設置為0;如果距離小於10,則將兩個車輪的速度設置為-30%;如果非前述的條件,則將兩個車輪的速度設置為30%。
連結網址
https://makecode.microbit.org/_9ugK1pVyPE8M
12.5結論
打開micro:bit後會顯示一個圖案,而TPBot會與其前車保持一定距離。如果檢測到的距離很近,速度會變慢;如果檢測到的距離很遠,速度會變快;如果檢測到的距離在設定的間隔值之間,則停止。
12.7常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
13.案例12:micro:bit遙控器
13.1目的
編程使用mciro:bit來控制TPBot。
13.2材料
TPBot智能汽車機器人* 1
13.3軟體
Microsoft MakeCode
13.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本
遙控器的部分
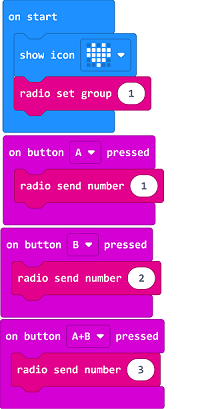
在micro:bit設置圖案,並將廣播群組設為1。
當按下A鍵,廣播發送數字1;按下B鍵後,廣播發送數字2;按下A + B鍵後,廣播發送數字3。
連結網址
https://makecode.microbit.org/_DYDT9ibh9V1E
##接收的部分
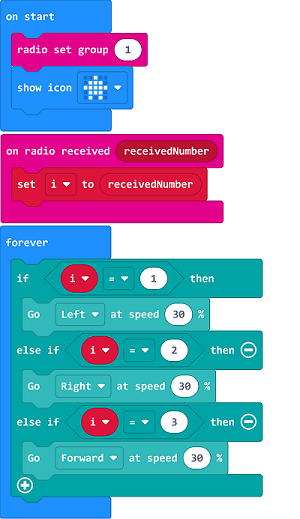
-在micro:bit設置圖案,並將廣播群組設為1。
-將接收到的數值保存為變數。判斷變數是否為1,如果是,則將TPBot設置為以30%的速度向左轉;如果變數為2,則將TPBot設置為以30%的速度向右轉;如果變數為3,則將TPBot設置為以30%的速度前進。
連結網址
https://makecode.microbit.org/_CAMF0t8rYT0j
##結論
啟動後在micro:bit上會顯示一個設置的圖案,按下A鍵,它會向左轉;按下B鍵,它會向右轉;按下A + B鍵,它會前進。
13.6常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
14.案例13:
以
micro:bit的加速度感測器進行遙控
14.1目的
編程使用加速度感測器來控制TPBot。
14.2材料
TPBot智能汽車機器人* 1
14.3軟體
Microsoft MakeCode
14.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本
遙控器的部分
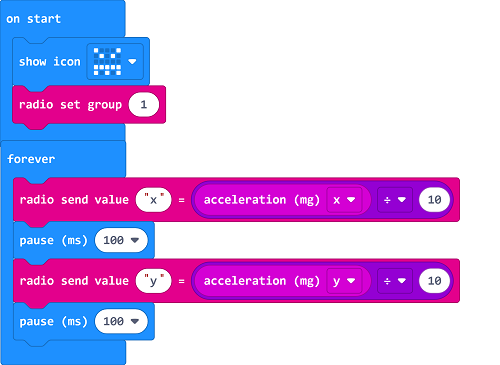
在micro:bit設置圖案,並將廣播群組設為1。
在重複執行的指令中,當廣播發送x值,則加速度感測值除以10並暫停100毫秒。當廣播發送y值,則加速度感測值除以10並暫停100毫秒。
連結網址
https://makecode.microbit.org/_11kPTbbxM9Mf
##接收的部分
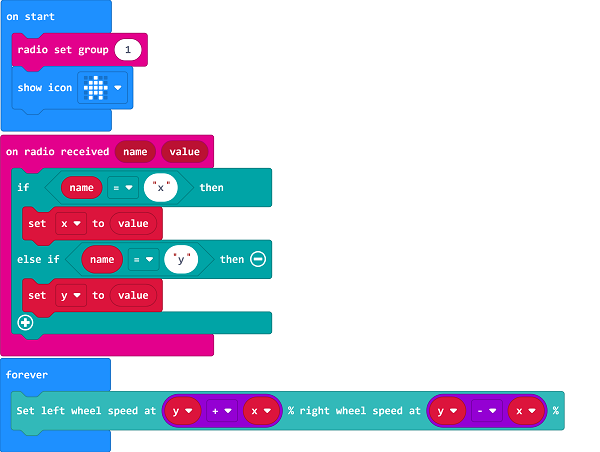
-在micro:bit設置圖案,並將廣播群組設為1。
-將兩個“ if ... else ...”指令拖曳到“ on radio receive ...”的指令中,判斷接收到的名稱是x還是y。如果是x,請將其保存為x的加速度變數。如果是y,則將其保存為y的加速度變數。-設置左輪的速度為y+x,右輪的速度為y-x。
連結網址
https://makecode.microbit.org/_a6LLFsMfDT7K
##結論
啟動micro:bit後會顯示設置的圖案,而TPBot的移動會由micro:bit上變化的角度來控制。
15.案例14:透過Joystick:bit擴充搖桿進行遙控
15.1目的
編程使用Joystick:bit來控制TPBot。
15.2材料
TPBot智能汽車機器人* 1
15.3軟體
Microsoft MakeCode
15.4程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
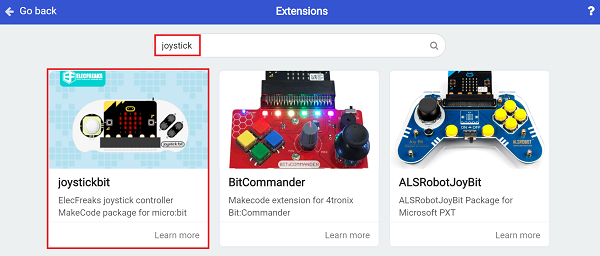
我們還需要添加一個套件來對Joystick:bit擴充搖桿進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ joystick”並下載。
##範本
遙控器的部分
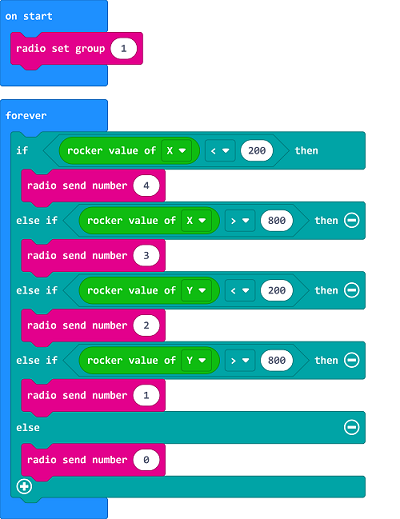
-將廣播群組設為1。
-在重複執行的指令中,設置判斷擴充搖桿的x&y值,如果x的值小於200,則廣播發送數字4;如果x的值超過800,則廣播發送數字3;如果y的值小於200,則廣播發送數字2;如果y的值超過800,則廣播發送數字1;若非前述條件,則廣播發送數字0。
連結網址
https://makecode.microbit.org/_7rzb5TEfrbu7
##接收的部分
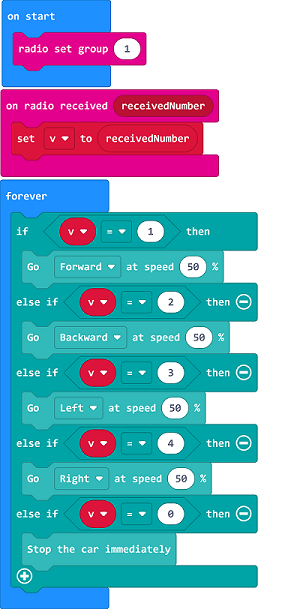
-將廣播群組設為1。
-將接收到的數值作為變數設置在“ on radio receive ...”的指令中,判斷接收到值。如果該值為1,則將TPBot設置為以50%的速度向前移動;如果為2,則將TPBot的倒退速度設置為50%;如果為3,則將TPBot設置為以50%的速度向左轉;如果為4,則將TPBot設置為以50%的速度向右轉;如果為0,則將TPBot設置為停止。
連結網址
https://makecode.microbit.org/_HPVCEx29zTPx
##結論
透過Joystick:bit能夠控制的TPBot的移動。
15.6常見問題
問:TPBot無法按照Wiki中的編碼運作。
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
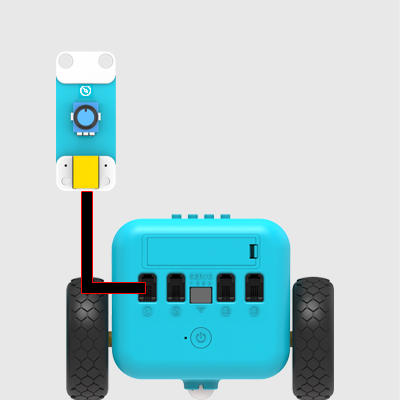
16.案例15:可以調整TPBot的速度
16.1目的
用電位計來調整TPBot的速度。
16.2材料
TPBot智能汽車機器人* 1
16.3硬體連接
將電位器連接到TPBot的端口1。
16.4軟體
Microsoft MakeCode
16.5程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
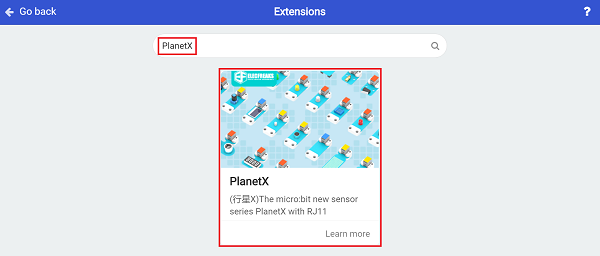
我們還需要添加一個套件。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“PlanetX”並下載。
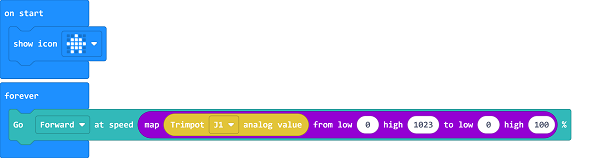
##範本
將顯示圖案的指令拖曳到在開始時執行的指令。
在重複執行的指令中,將電位器的回傳值從0~1023到0~100,並將對應值設置為車子前進的速度。
連結網址
https://makecode.microbit.org/_ArRM71PD6de0
16.6結論
啟動後,電位器可以調整TPBot的速度。
16.8常見問題
問:在這種案例操作下,為什麼TPBot可能無法正常運作?
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
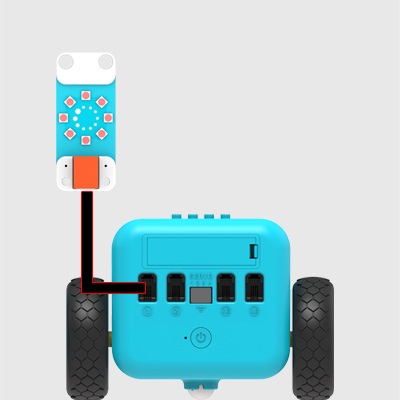
17.案例16:耀眼的燈光
17.1目的
模擬警車的燈光。
17.2材料
TPBot智能汽車機器人* 1
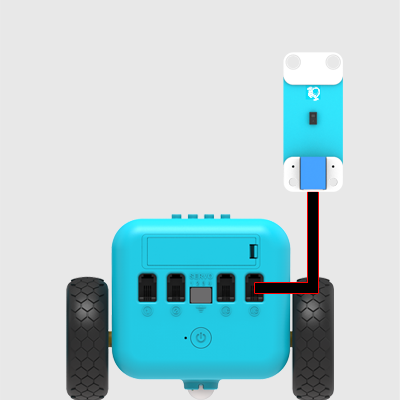
17.3硬體連接
將Rainbow連接到TPBot的端口1。
17.4軟體
Microsoft MakeCode
17.5程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
我們還需要添加一個套件。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“PlanetX”並下載。
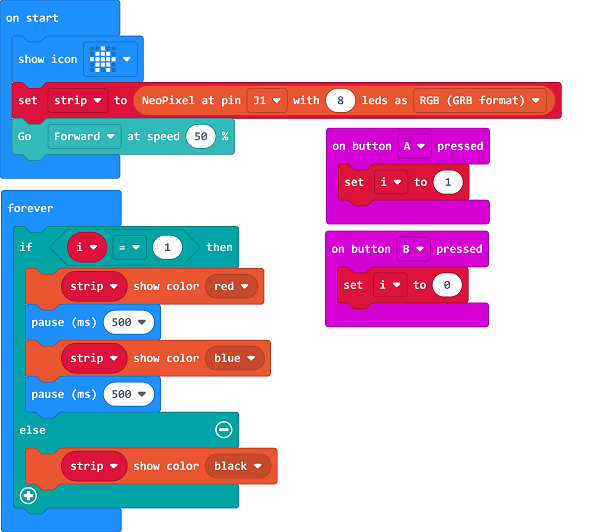
17.6範本
在開始時執行的指令中,初始化led燈帶並將其連接到J1端口,將TPBot設置為以50%的速度向前移動。
在按下A鍵時將變數“ i”設置為1,在按下B鍵時將其設置為0。
在重複執行的指令中,設置判斷變數“ i”是否為1,如果是,則將led設置為紅色並暫停500毫秒,然後設置為藍色並暫停500毫秒;如果不是,將其設置為黑色。
連結網址
https : //makecode.microbit.org/_TvrRaMJLKPWr
17.7結論
啟動後TPBot會向前移動,按micro:bit上的A鍵打開紅色和藍色循環的LED,按B鍵關閉它。
17.9常見問題
問:在這種案例操作下,為什麼TPBot可能無法正常運作?
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
18.案例17:透過手勢控制TPBot
18.1目的
透過手勢控制移動(前進、後退、向左/向右轉)。
18.2材料
TPBot智能汽車機器人* 1
18.3硬體連接
將手勢感測器連接到TPBot上的IIC端口。
18.4軟體
Microsoft MakeCode
18.5程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
我們還需要添加一個套件。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“PlanetX”並下載。
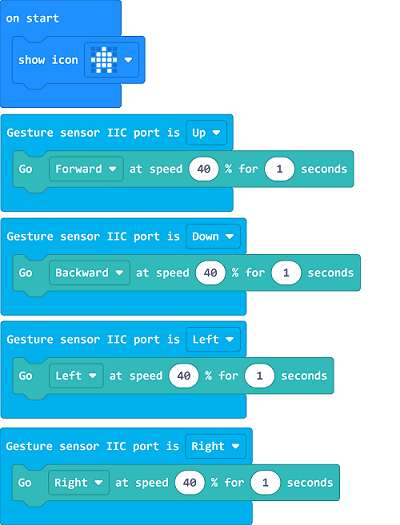
18.6範本
在開始時執行的指令中,放入向上的箭頭圖案。
透過手勢感測器檢測手勢,將車子設置為以40%的速度向前行駛1秒,同時檢測到您向上方揮手。
以類似的方式編程,以左右揮動手勢。
連結網址
https://makecode.microbit.org/_PqAPVDY7hDRR
18.7結論
以手面對手勢感測器,以手勢控制TPBot的移動。
18.9常見問題
問:在這種案例操作下,為什麼TPBot可能無法正常運作?
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
19.案例18:透過顏色控制TPBot
19.1目的
Rainbow LED根據卡片的顏色而變化,並相應地執行已定義的功能(向前移動、隨機更改前燈的顏色、避開障礙物、循跡)。
19.2材料
TPBot智能汽車機器人* 1
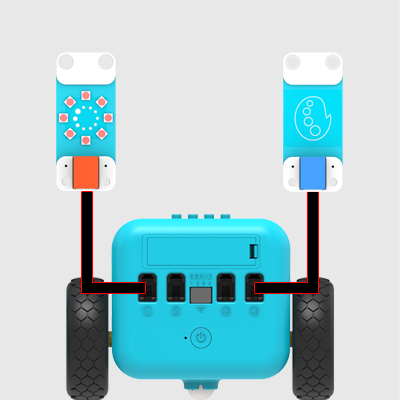
19.3硬體連接
將Rainbow LED連接到端口1,將顏色感測器連接到TPBot的IIC端口。
19.4軟體
Microsoft MakeCode
19.5程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
我們還需要添加一個套件。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“PlanetX”並下載。
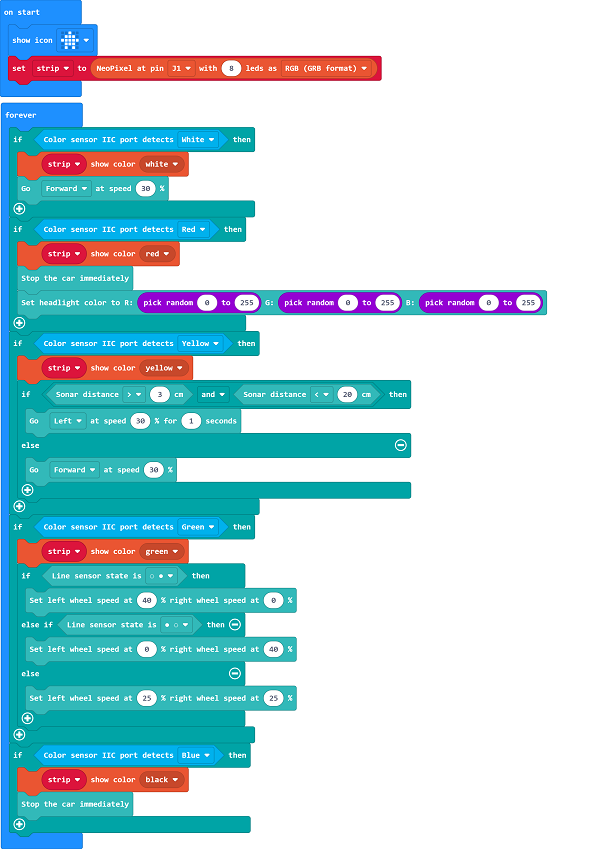
19.6範本
在開始時執行的指令中,放入向上的箭頭圖案,並初始化LED燈條,將其連接到J1端口。
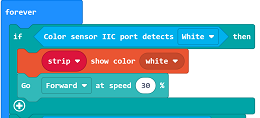
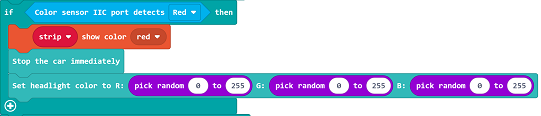
在重複執行的指令中,如果顏色感測器檢測到白色,則將Rainbow LED設置為白色,將TPBot設置為以30%的速度向前移動。將Rainbow LED設置為紅色,如果顏色感測器檢測到紅色,則將TPBot設置為停止移動,並將前燈的RGB值設置為0至225之間的隨機數。
如果顏色感測器檢測到紅色,則將Rainbow LED設置為紅色,將TPBot設置為停止移動,並將前燈的RGB值設置為0至225之間的隨機數。
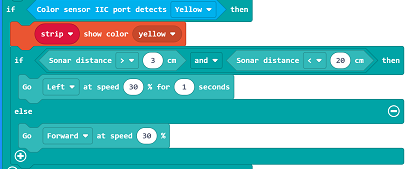
如果顏色感測器檢測到黃色,則將Rainbow LED設置為黃色,並判斷聲納的回傳值是否在3~20之間。如果是,則將TPBot設置為以30%的速度向左轉持續1秒;如果不是,則以30%的速度向前移動。
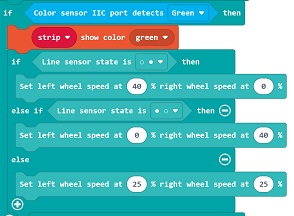
如果顏色感測器檢測到綠色,則將Rainbow LED設置為綠色,並判斷雙向循跡感測器的狀態。如果在左側檢測到黑色,則將左輪的速度設置為0,將右輪的速度設置為40;如果在右側檢測到黑色,則將左輪的速度設置為40,將右輪的速度設置為0;如果在兩側都檢測到它,則代表TPBot不會偏離黑線,並將其設置為以25%的速度向前移動。
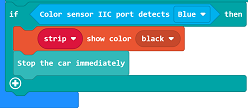
如果顏色感測器檢測到藍色,則將Rainbow LED設置為黑色,將TPBot設置為停止移動。
編程
連結網址
https://makecode.microbit.org/_YrH0rDiLJEKg
##結論
將顏色不同的卡片放在手勢感測器的前面,以啟動不同的功能:
白卡:Rainbow LED亮白色,並且TPBot向前移動。
紅牌:Rainbow LED亮紅色,並且TPBot停止移動,並且前燈隨機改變顏色。
黃卡:Rainbow LED亮黃色,並且TPBot進入避障模式。
綠卡:Rainbow LED亮綠色,並且TPBot進入循跡模式。
藍卡:Rainbow LED亮藍色,並且TPBot停止移動。
19.8常見問題
問:在這種案例操作下,為什麼TPBot可能無法正常運作?
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
20.案例19:掃地機
20.1目的
打造一個TPBot掃地機。
20.2材料
TPBot智能汽車機器人* 1
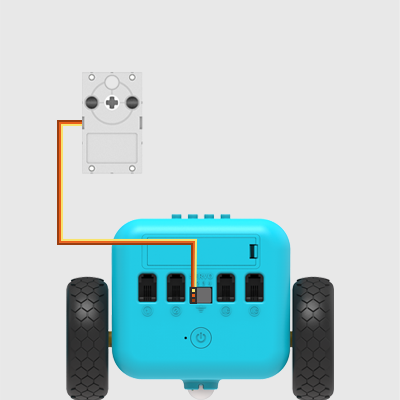
20.3硬體連接
將360度感測器連接到TPBot上的伺服器
1端口
(伺服器不包含在我們的TPBot套件中)
。
20.4軟體
Microsoft MakeCode
20.5程式設計
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
我們需要添加一個套件來進行程式設計。先點擊選擇底部的“Extensions”,然後在對話框中搜尋“ tpbot”並下載。
##範本
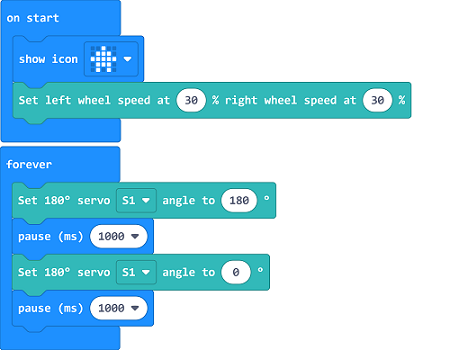
在開始時執行的指令中設置箭頭向上的圖案,並將車子設置為以30%的速度前進;在重複執行的指令中,將連接到S1的伺服器設置為旋轉180度並暫停1秒,接著將其設置為旋轉0度並暫停1秒。
連結網址
https://makecode.microbit.org/_664VpuAVMcCa
##結論
車子前進的同時伺服也在旋轉。
20.7常見問題
問:在這種案例操作下,為什麼TPBot可能無法正常運作?
答:可能是電池沒電了,請嘗試在編碼中增加速度值來解決這問題。
返回列表
電話:04-2375-3535
傳真:04-2256-9949
統編:90386785
E-mail:service@oursteam.com.tw
LINE ID:@oursteam
學校機關報價
經銷通路報價
客製產品規劃
師資培訓課程
教師研習辦理
社團營隊活動
關於我們
代理商品
教學資源
最新消息
聯絡我們
購物說明
訂單查詢
付款回覆
Copyright © 奧斯丁國際 All Rights Reserved.