PARENTS
親子
TEACHERS
教師
GOODS
產品
OUR ESG
社會責任
CONTACT
聯絡我們
NEWS
最新消息
首頁
教學資源
micro:bit 擴充板、感測器延伸套件教案分享
ELECFREAKS micro:bit Starter Kit 入門套件
教學資源
2021/02/17
ELECFREAKS micro:bit Starter Kit 入門套件
1.簡介
ElecFreaks micro:bit Starter Kit入門套件是為需要學習電路和編程知識的人們而設計的。該套件提供了一些基本的電子零組件,如LED、按鈕、蜂鳴器、溫度傳感器、舵機和馬達等。micro:bit Starter Kit入門套件可以幫助您進入美好的電子世界。
1.1零件
3.第01課:LED
3.1介紹
LED具有廣泛的應用。我們在日常生活中看到的大多數信號燈都使用LED作為其主要光源。在今天的實驗中,我們將使用Micro:bit使2個LED珠交替閃爍。
3.2零件清單
硬體:
1個Micro:bit板
1個 x MicroB USB電纜
1個Microbit麵包板連接板
1 x透明麵包板-83 * 55毫米
2個LED
2個100歐姆電阻
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks Micro:bit入門套件。
3.3主要零件介紹
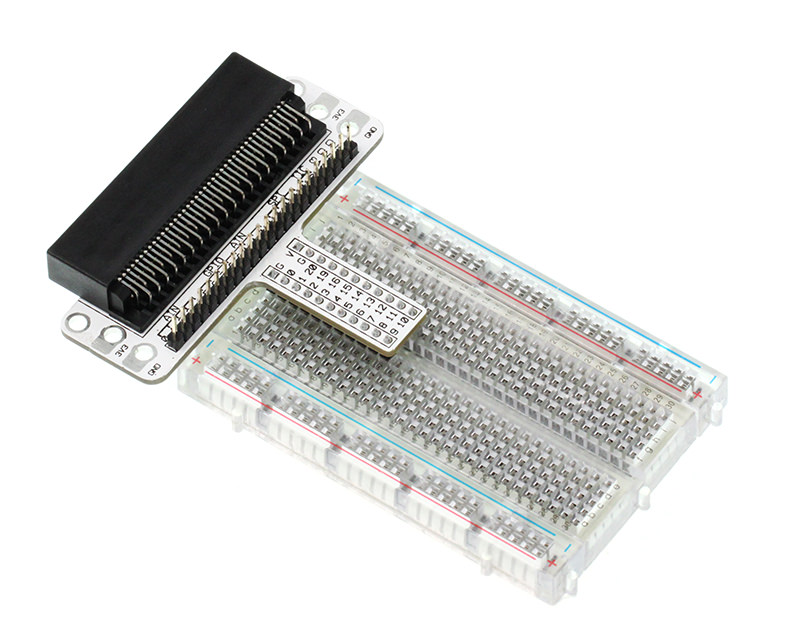
Micro:bit麵包板連接板
Micro:bit麵包板連接板可以擴展Micro:bit的所有引腳,因此我們可以在麵包板上創建簡單的電路。
此圖顯示了Micro:bit麵包板連接板如何插入麵包板,它適用於各種麵包板。
LED
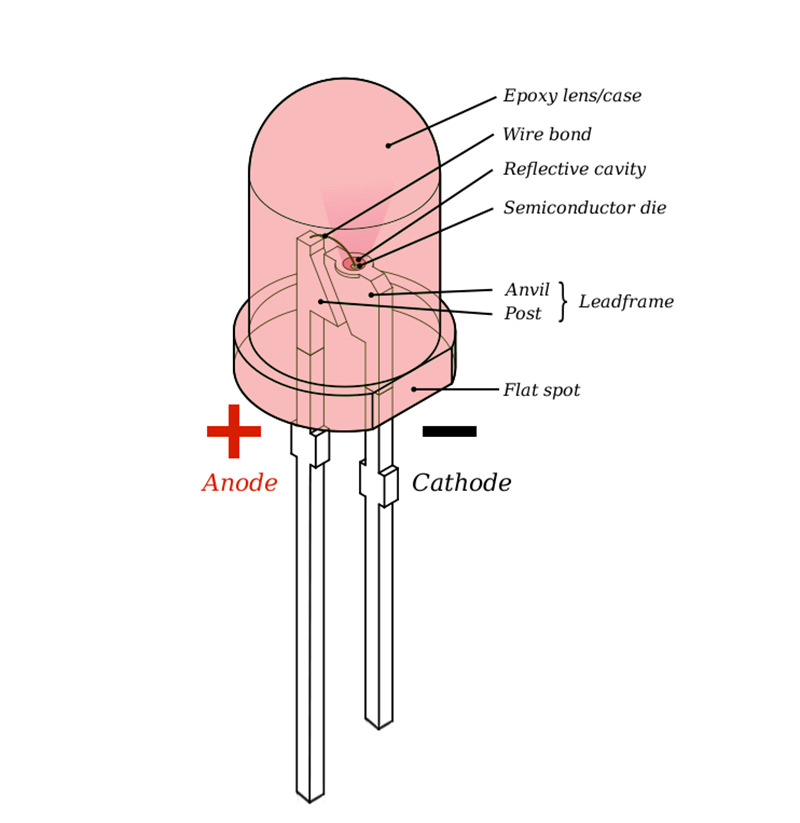
LED是發光二極體的縮寫,它是一種半導體二極體,可以將電轉換為光(當電流通過時,它會點亮)。
如果仔細檢查LED,您會注意到兩個特徵:一是支腳的長度不同,二是在LED的其中一側並不是圓柱形,而是扁平的。這些指示器可以顯示哪個支腳是陽極(正極),
哪個
支腳
是陰極(負極)。較長的支腳連接到正電源(3.3v),並且具有扁平側的支腳接地。
電阻器
電阻器是電流控制的零件,它可以限制所連接電路的電流。在我們的實驗中是使用100Ω電阻,如果沒有電流限制,則可能損壞LED。
是否想通過色環了解電阻值?您可以閱讀這篇文章:
如何識別色環電阻值
。
3.5硬體連接
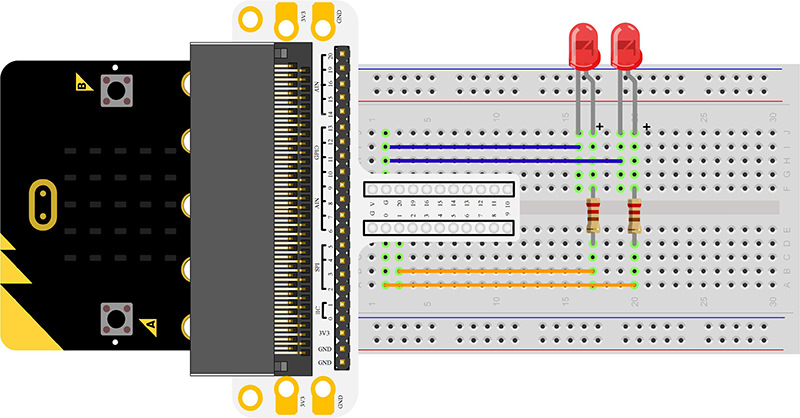
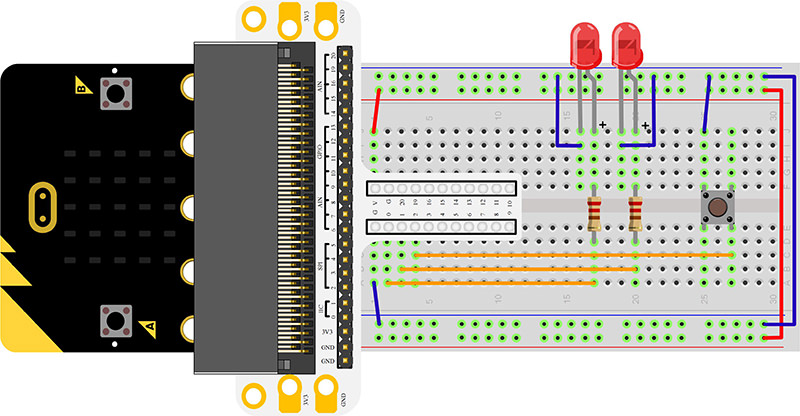
根據下圖連接零件:
將短支腳連接到GND。
透過電阻將較長的支腳與P0和P1端口相連。
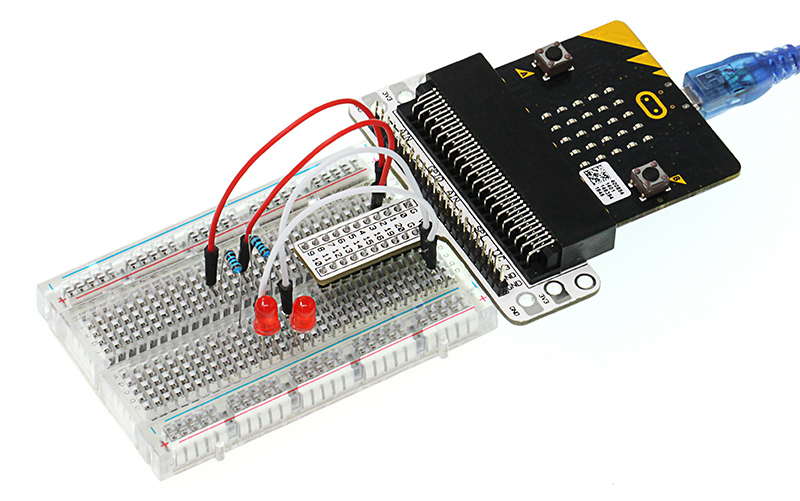
完成連接後,您將看到以下內容:
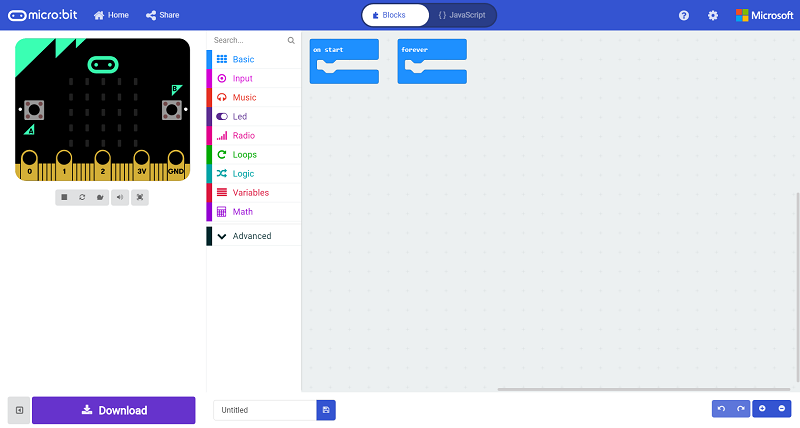
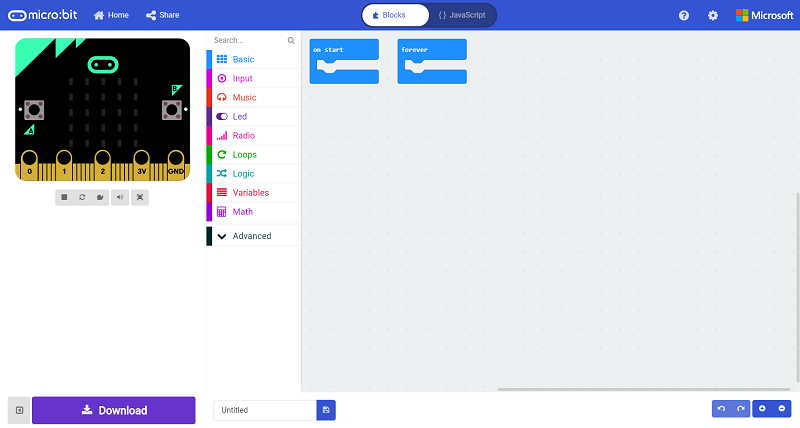
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
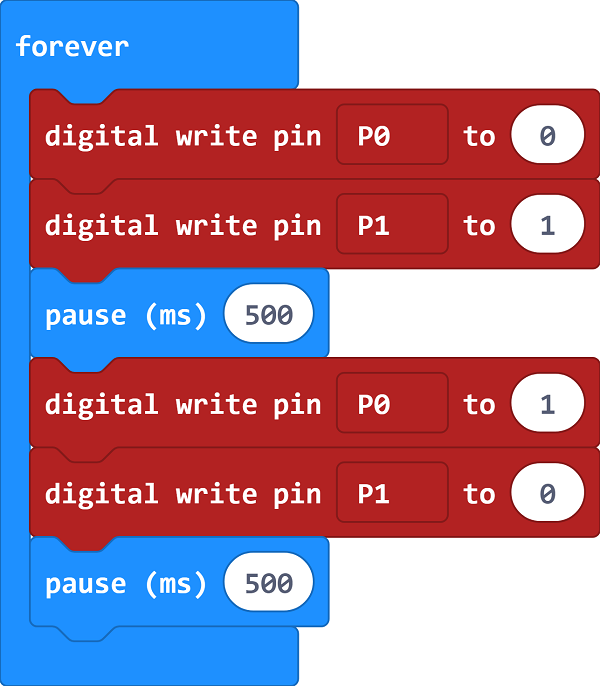
編程指令如圖所示:
程式的詳細介紹:
將數位訊號寫入數字0到P0引腳以關閉LED;將數位訊號寫入數字1到P1引腳以打開LED,然後設置暫停時間為500ms。
參考
連結:
https://makecode.microbit.org/_LybdqfauX3TR
3.6結果
您可以看到2個LED交替閃爍。如果沒有,則需要返回並檢查操作。
3.7探索
如果我們要控制4個LED並使它們輪流發光,我們如何設計電路和程式?歡迎與我們進一步討論!
4.第02課:按鈕
4.1介紹
在之前的實驗中,我們學習到如何使用Micro:bit來控制2個LED並使它們交替閃爍。這次我們將使用一個按鈕來控制LED閃光燈。這代表當我們按下按鈕時,兩個LED會交替閃爍;放開按鈕時,LED會停止閃爍。
4.2零件清單
硬體:
1個Micro:bit板
1個USB傳輸線
1個Microbit麵包板
連接板
1個透明麵包板-83 * 55毫米
2個LED
2個100歐姆電阻
1個瞬時按鈕開關
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks Micro:bit入門套件。
4.3主要零件介紹
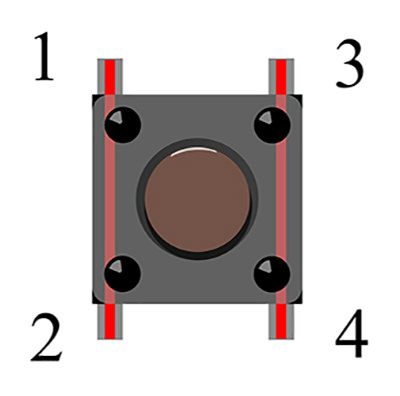
瞬時按鈕開關
這是控制電子設備的常用零件,主要用於連接或切斷控制電路,它能達到對馬達或其他電子設備的控制。瞬時按鈕開關通常保持打開狀態,當按下時電路就會連接;放開後則將恢復斷開狀態。
瞬時按鈕開關有4個引腳,可分為2組:引腳1短接引腳2,引腳3短接引腳4。
4.5硬體連接
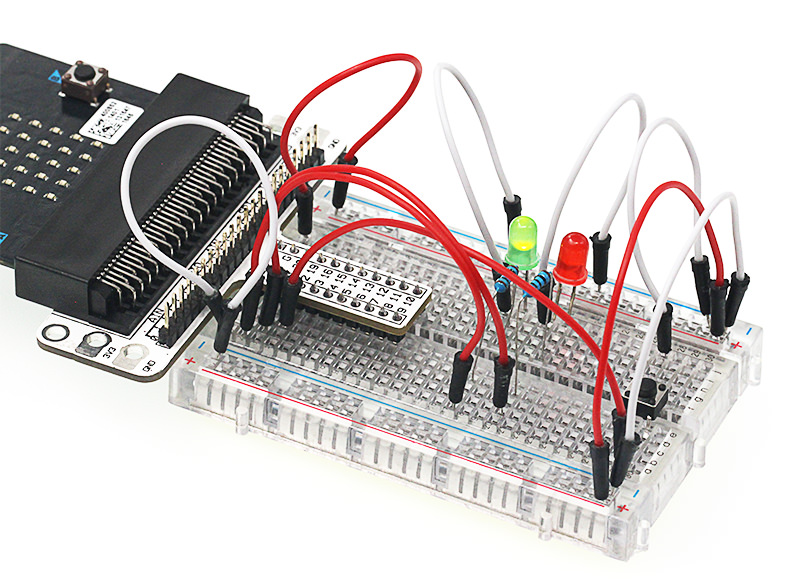
根據下圖連接組件:
1.將較短的支腳連接到GND。
2.透過電阻器將較長的支腳與P0和P1端口相連。
3.將瞬時按鈕連接到P2端口。
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
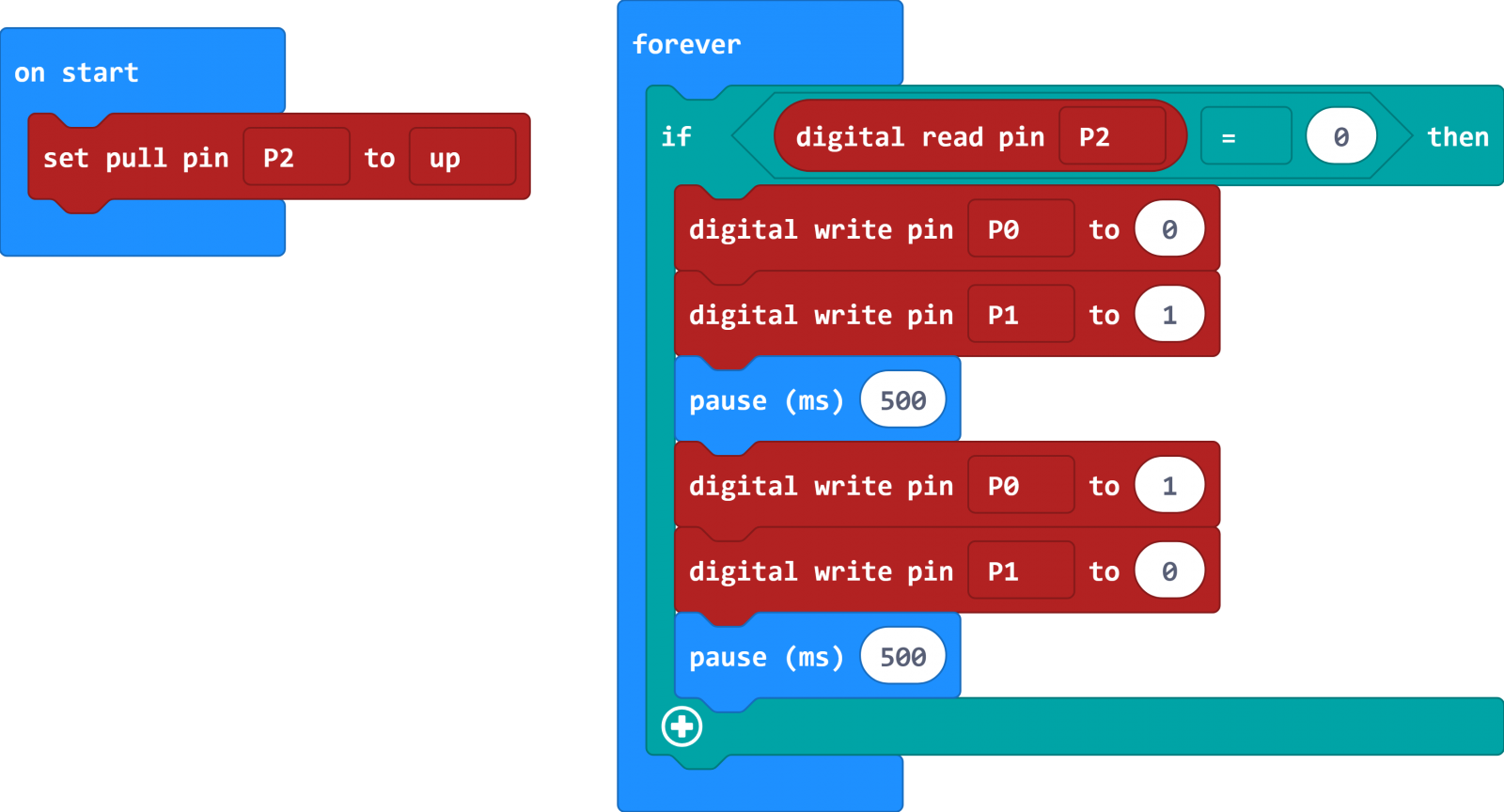
編程指令如圖所示:
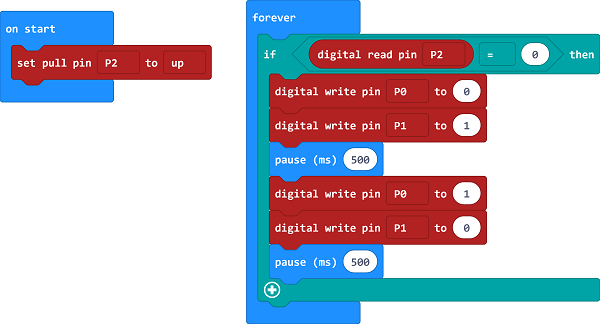
程式的詳細介紹:
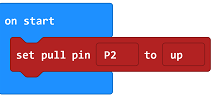
1.在“當啟動時”將P2引腳電阻設為上。
2.從P2讀取狀態,檢查是否按下了按鈕,如果是,將數位信號寫入引腳P0、數字寫入0以關閉LED;將數位信號寫入引腳P1、數字寫入1以打開LED,然後將暫停設置為500ms;將數位信號寫入引腳P0、數字寫入1以打開LED;將數位信號寫入引腳P1、數字寫入0以關閉LED,然後將暫停設置為500ms。
參考
連結:
https://makecode.microbit.org/_T585WeYwVWtv
4.6結果
按下該按鈕時,您可以看到2個LED交替閃爍。放開按鈕後,它們將停止閃爍。如果沒有,則需要返回並檢查操作。
4.7探索
如果要在按下按鈕時使紅色LED發亮並在放開按鈕時使綠色LED發亮,我們該如何編程?
5.第03課:電位器
5.1介紹
Trimpot(電位器)是一種常見的壓力調節組件。在以下實驗中,我們將讀取電位器上的輸出電壓,並將其顯示在帶有條形圖的micro:bit 5 * 5 LED屏幕上。
5.2零件清單
硬體:
1個Micro:bit板
1個USB傳輸線
1個Microbit麵包板
連接板
1個透明麵包板-83 * 55毫米
1個10K Trimpot
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks Micro:bit入門套件。
5.3主要零件介紹
電位器
電位器是一種可調電子元件。它包含一個電阻器和旋轉或滑動系統。當在電阻的兩個固定觸點上加上外部電壓時,可以通過旋轉或滑動系統來改變電阻的觸點,在可動觸點和兩個固定觸點之間形成與可動觸點的位置有一定關係的電壓。大多數情況下,它用作電壓分配。
5.4實驗步驟
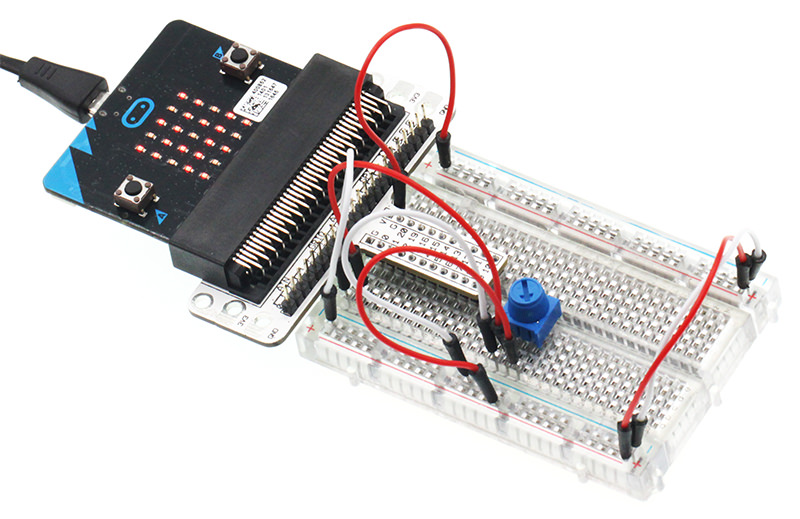
硬體連接
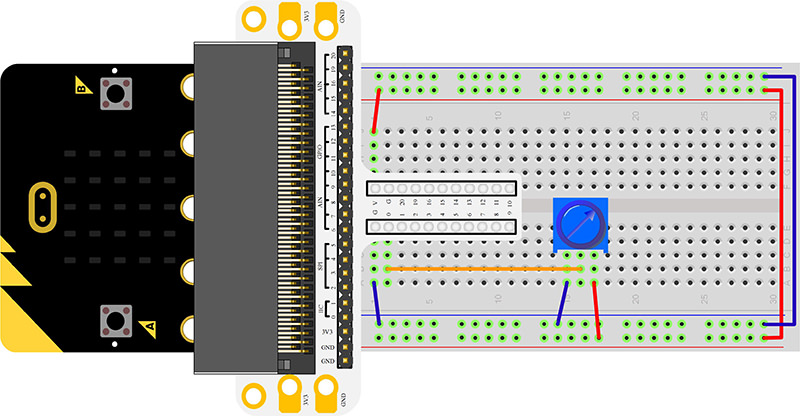
根據下圖連接零件:
1.將麵包板
連接板
的P0端口與電位器的S端口相連。
2.將其他兩個端口連接到GND和3V電源端口。
完成連接後,您將看到以下內容:
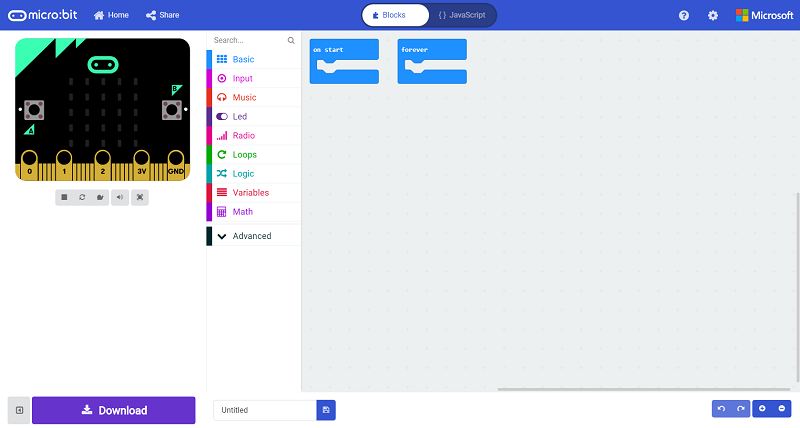
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
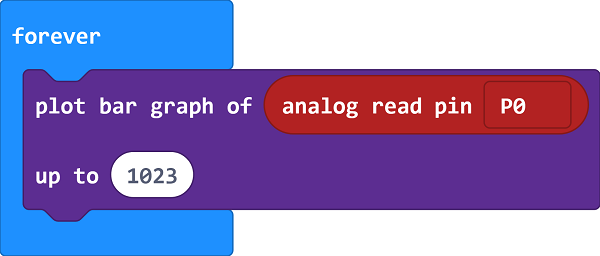
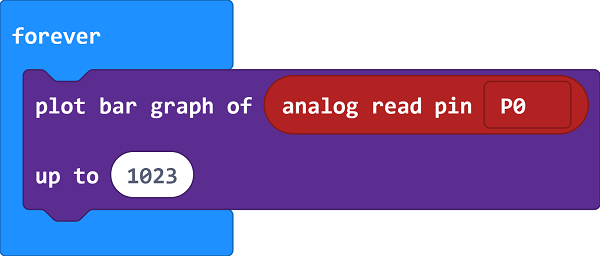
編程指令如圖所示:
程式的詳細介紹:
從P0端口讀取類比信號(0~1023),並以條形圖的形式在micro:bit上顯示。
參考
連結:
https://makecode.microbit.org/_A2a4C65woMoc
5.5結果
旋轉電位器按鈕,電壓值將以條形圖的形式顯示在micro:bit上。當電壓讀數為“ 0”時,LED屏幕僅顯示一個像素點。當電壓變為3.3V時,LED屏幕將全部發光。
5.6探索
如果要使用電位器調整LED的亮度,我們如何設計電路和程式?
6.第04課:光電管
6.1介紹
光電管是一種基於內部光電效應的特殊電阻器。它的電阻值與光的亮度相反,光越亮,電阻值就越低。通常,光電管是光電開關的核心組件。在以下實驗中,我們將使用光電管在micro:bit上控制5 * 5 LED屏幕的亮度。
6.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板
連接板
1個透明麵包板-83 * 55毫米
1個光電管
1個10k歐姆電阻
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
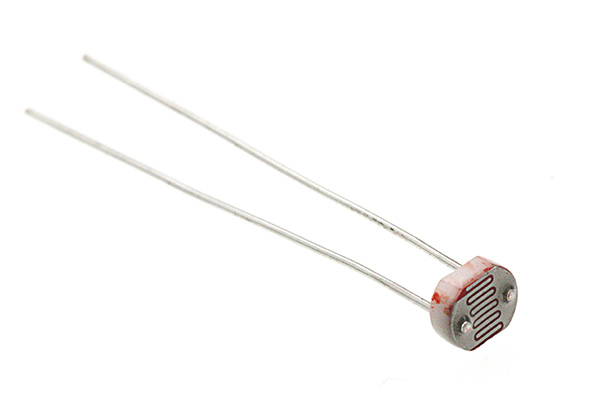
6.3主要零件介紹
光電管
光電管是一種基於內部光電效應,由Cds或CdSe等半導體材料製成的特殊電阻器。光越亮,電阻值就越低。隨著光強度的增加,其電阻值急劇下降,最小光阻值可降至1KΩ以下。光電管對光非常敏感。當沒有光時,其電阻值達到最大值,而其暗電阻值通常最大可達到1.5MΩ。
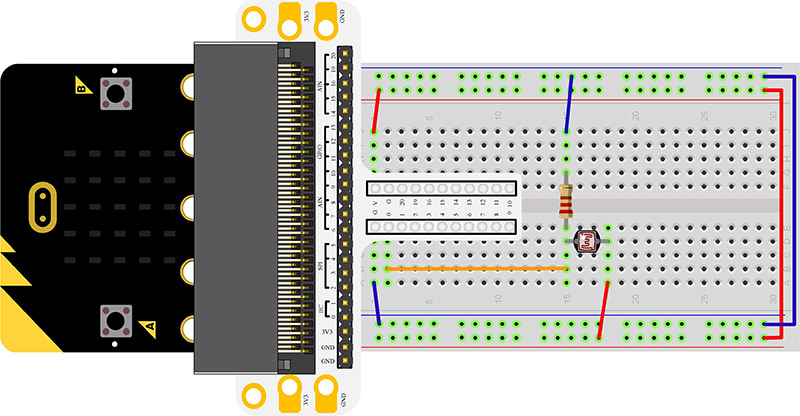
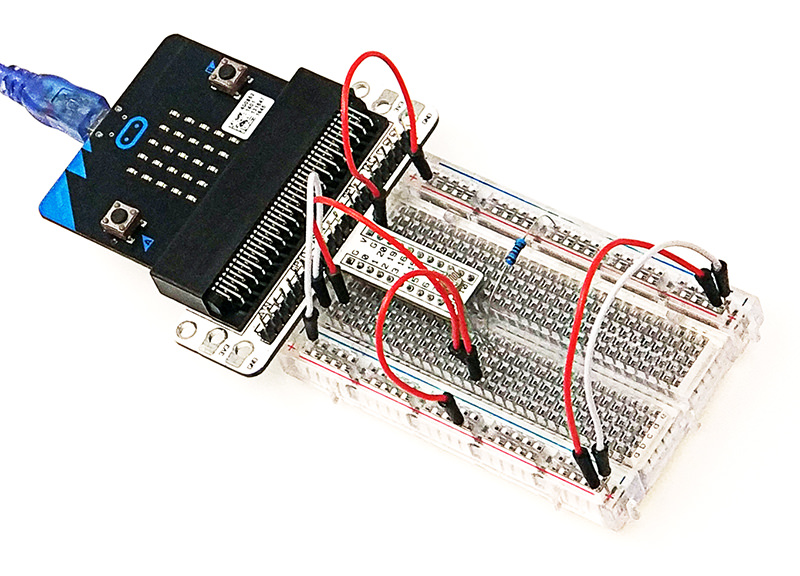
6.4實驗步驟
硬體連接
根據下圖連接零件:
1.將光電管連接到P0端口。
2.將10Ω電阻與光電管並聯。
完成連接後,您將看到以下內容:
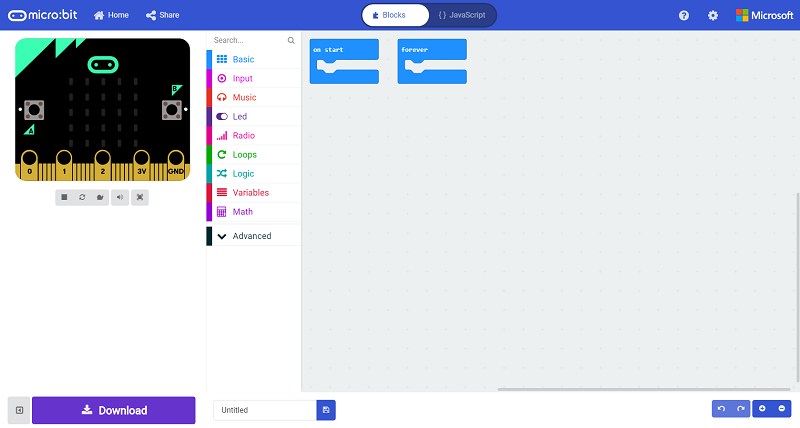
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
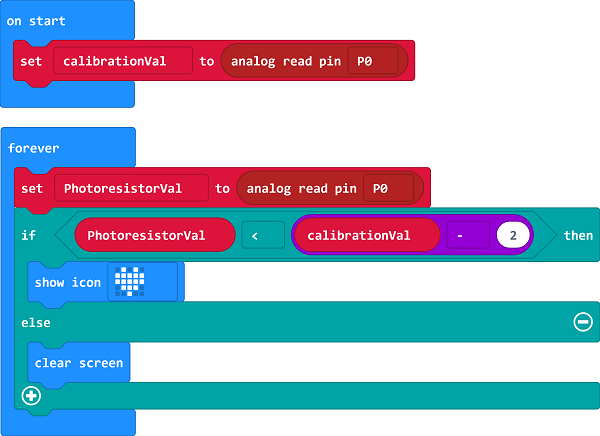
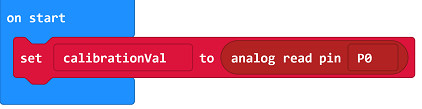
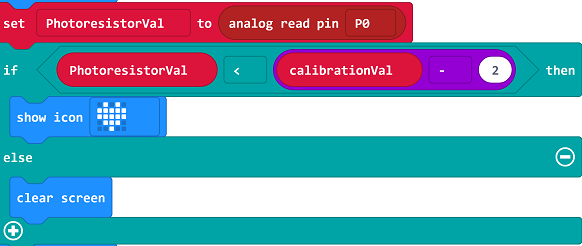
編程指令如圖所示:
程式的詳細介紹:
1.類比信號讀取P0的電壓作為“啟動時”亮度的參考值
。
2.在“反覆執行”的積木中,類比信號從P0端口讀取電壓。一旦光敏電阻值小於校正值減2,則辨識光已關閉(它表示如果光的強度增加,光電管的電阻值就會降低),並在micro:bit上顯示一個愛心圖案。CalibrationVal減2是用來調整靈敏度,該值越小,靈敏度越高。
參考
連結:
https://makecode.microbit.org/_3tFFoPhLF7hX
6.5結果
打開燈,micro:bit上的LED屏幕什麼也不會顯示。關閉燈,LED屏幕則顯示一個圖案。
6.6探索
如果要使用光電管控制LED,該如何設計電路和程式?
7.第05課:RGB漫射LED燈泡
7.1介紹
RGB漫射LED燈泡是一種可以發出三種不同顏色的光的LED:紅色,綠色和藍色。在此實驗中,我們將使RGB漫射LED燈泡逐漸在三種不同顏色之間轉換其光。
7.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個微型麵包板連接板
1個透明麵包板-83 * 55毫米
1個RGB漫射LED燈泡
3個100歐姆電阻
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
7.3主要零件介紹
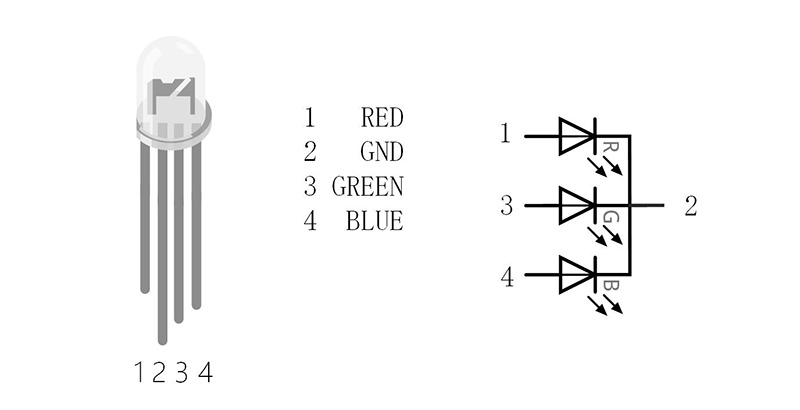
RGB漫射LED燈泡
RGB漫射LED燈泡是一種將紅色LED、綠色LED和藍色LED集成到零件中的LED。大家都知道光的三種原色是紅色、綠色和藍色。使用三種顏色的光加以不同組合,我們可以創建世界上的所有顏色。同樣的如果我們使用RGB漫射LED燈泡將不同亮度的光分組,那麼它可以形成各種顏色。
RGB漫射LED燈泡可以分為2種類型:共陽極和共陰極。在共陰極RGB漫射LED燈泡中,其公共端口通常連接GND,而在共陽極RGB漫射LED燈泡中,其公共端口連接VCC。在本實驗中,我們選擇共陰極RGB漫射LED燈泡。
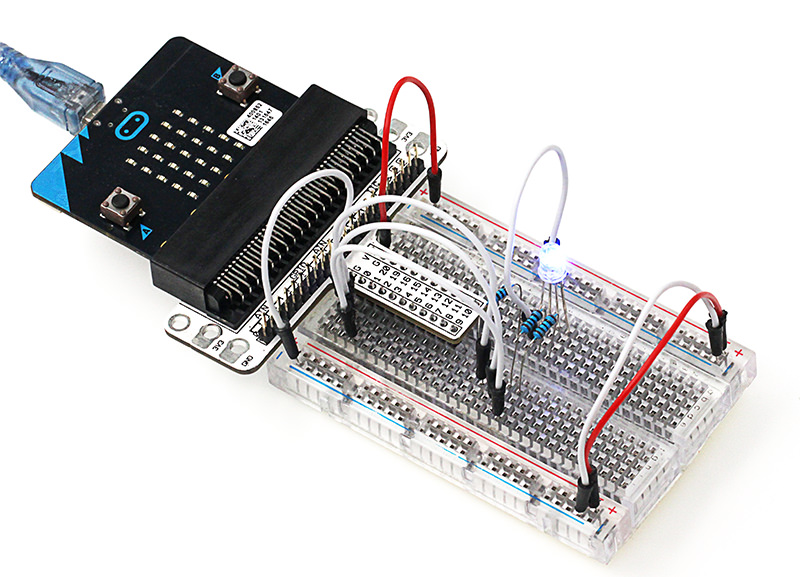
7.5硬體連接
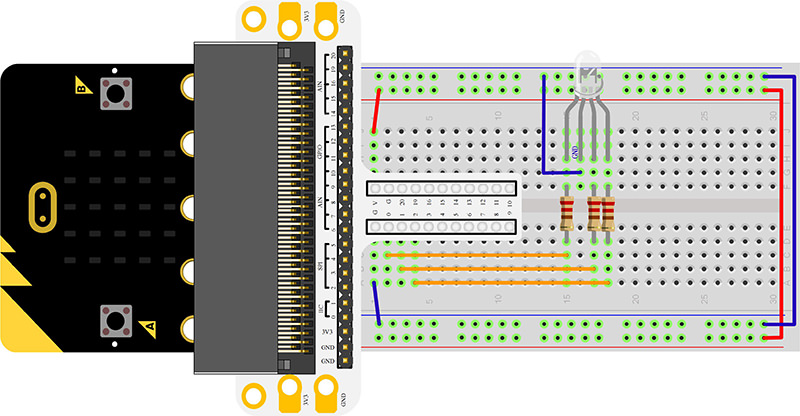
根據下圖連接零件:
1.將RGB漫射LED燈泡的三個引腳分別連接到P0,P1和P2,然後連接一個100Ω電阻。
2.透過麵包板將RGB漫射LED燈泡的GND與麵包板連接板的GND連接。
完成連接後,您將看到以下內容:
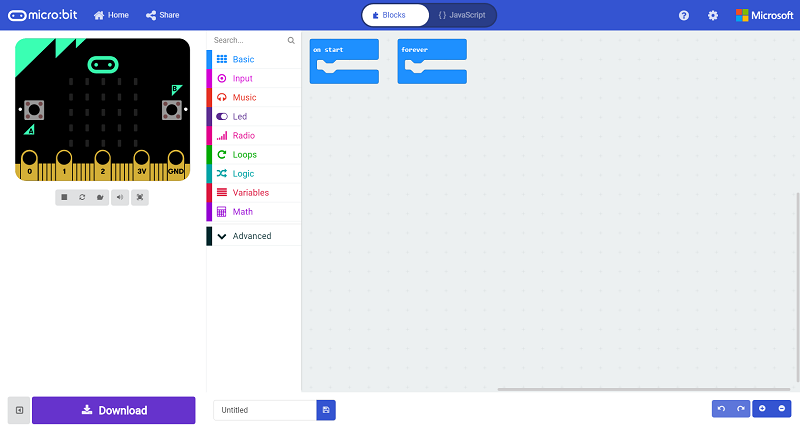
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
編程指令如圖所示:
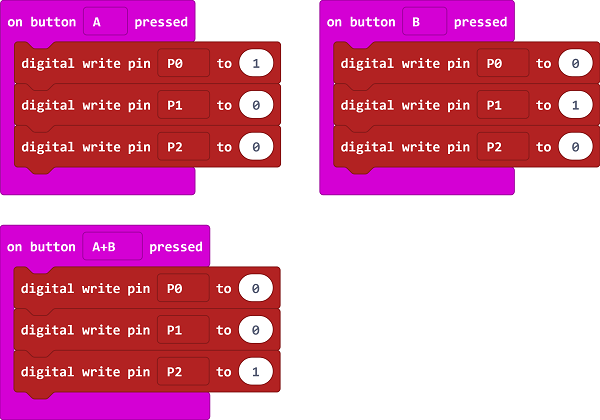
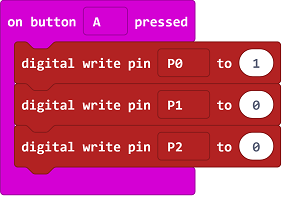
程式的詳細介紹:
當按A鍵時,將R(紅)設置為1,將G(綠)和B(藍)設置為0。接著
以類似的方式進行
當按B鍵時,以及當按A + B鍵時的編程設置。
參考
連結:
https://makecode.microbit.org/_Th3Vum76F4Tr
7.6結果
按下A鍵,LED變為紅色。按下B鍵,LED變為綠色。按下A + B鍵,LED變為藍色。
7.7探索
如果要使用RGB漫射LED燈泡發出青色,品紅色,黃色的光,該如何設計電路和程式?
8.第06課:自動鎖定開關
8.1介紹
自動鎖定開關是一種常見的的按鈕開關。首次按下按鈕時,開關已連接並保持“自動鎖定”狀態。當我們第二次按下按鈕時,開關斷開。同時,按鈕將恢復其初始位置。在本實驗中,我們將使用自動鎖定開關來控制LED燈。
8.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個自動鎖定開關
1個LED
1個100歐姆電阻
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
8.3主要零件介紹
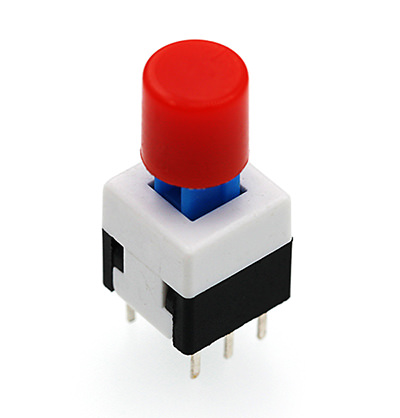
自動鎖定開關
自動鎖定開關通常是指具有內置機械鎖定功能的開關。按下開關即可放開,它並不會恢復原樣,因為它已鎖定。您必須再次按下它,它才會被解鎖並恢復原樣。這就是所謂的自動鎖定開關。它具有直接完全關閉電源的功能,廣泛用於早期的電視和顯示器。
注意:這種自動鎖定開關包含兩組雙切開關。在此實驗中,我們僅使用一組。因此,我們減少了一組的常見頁腳。
8.4實驗步驟
硬體連接
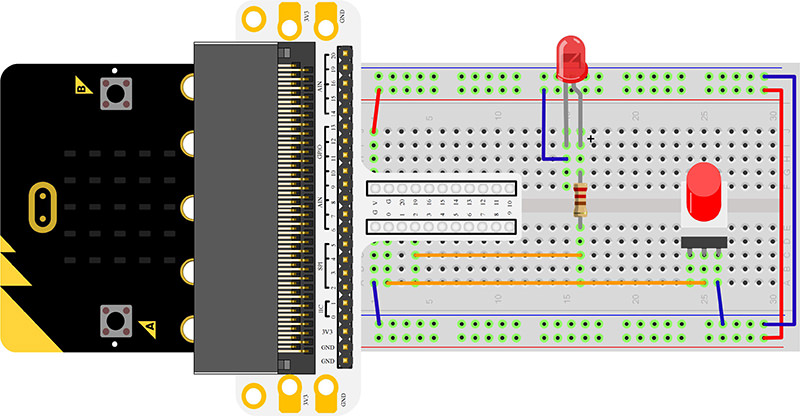
根據下圖連接零件:
1.將自動鎖定開關連接到麵包板連接板的P0端口。
2.透過100Ω電阻將LED連接到麵包板的P2端口。
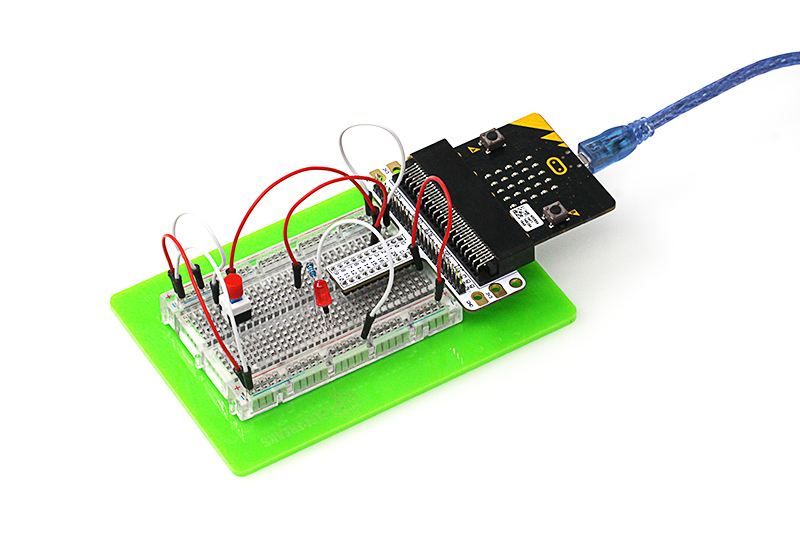
完成連接後,您將看到以下內容:
軟體
請打開makecode.microbit.org(https://makecode.microbit.org/)並將代碼寫入編輯區域。
添加套件
不需要
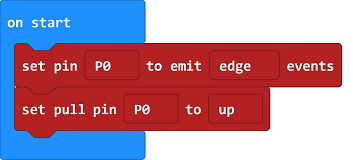
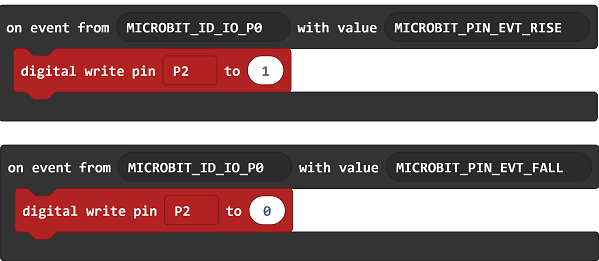
編程指令如圖所示:
程式的詳細介紹:
1.將事件顯示器設置為P0端口並將其設置為高水平的。
2.設置事件觸發開關,按下自動鎖定開關,電位發生變化,指示燈點亮; 再次按下時,電位再次變化,並且led燈熄滅。
參考
連結:
https://makecode.microbit.org/_Dhy5i9KVeLAK
8.5結果
按下自動鎖定開關自鎖開關,LED燈亮;再按一次,LED指示燈熄滅。
8.6探索
通常來說,樓梯燈使用雙切開關來實現此功能。我們可以在樓上打開燈,在樓下關閉燈,反之亦然。假設要使用2個自動鎖定開關來實現樓梯燈功能,該如何設計電路和程式?
9.第07課:溫度感測器
9.1介紹
溫度感測器是一種可以檢測溫度並將其轉換為輸出數據的感測器。溫度感測器是多種溫度表和儀器的核心零件。在本實驗中,我們將學習模擬溫度感測器–TMP36並將其數據顯示在micro:bit上。
9.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個麵包板連接板
1個透明麵包板-83 * 55毫米
1個TMP36溫度傳感器
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
9.3主要零件介紹
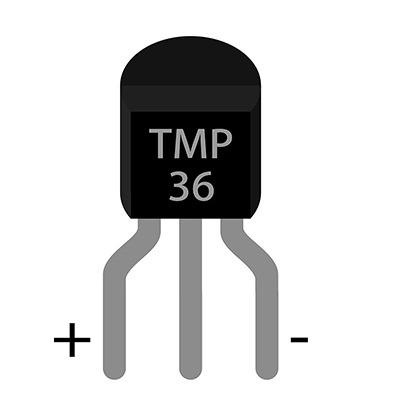
TMP36
TMP36是一種類比溫度感測器。其輸出電壓和溫度形成線性關係,這代表著較高的溫度將具有較大的輸出電壓。
注意:當我們查看標記為“ TMP36”的正面時,芯片的左側引腳為VCC,中間引腳為Vout,右側引腳為GND。請勿錯誤連接,否則可能會損壞連接的組件。
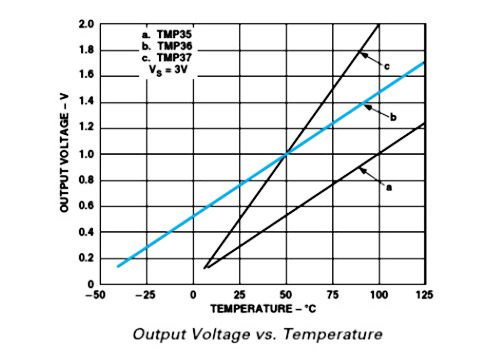
下方是TMP36的輸出電壓隨溫度變化的曲線圖:
從上圖可以看出溫度公式為:溫度(℃)=(輸出電壓(mV)-500)/ 10
9.4實驗步驟
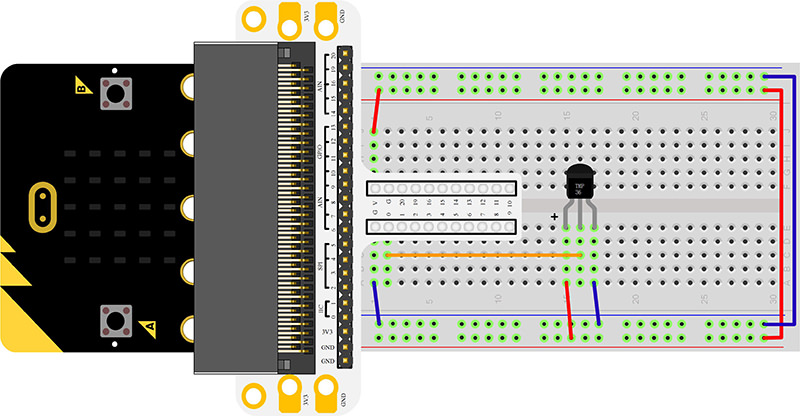
硬體連接
根據下圖連接零件:
1.將感測器連接到麵包板連接板的P0端口。
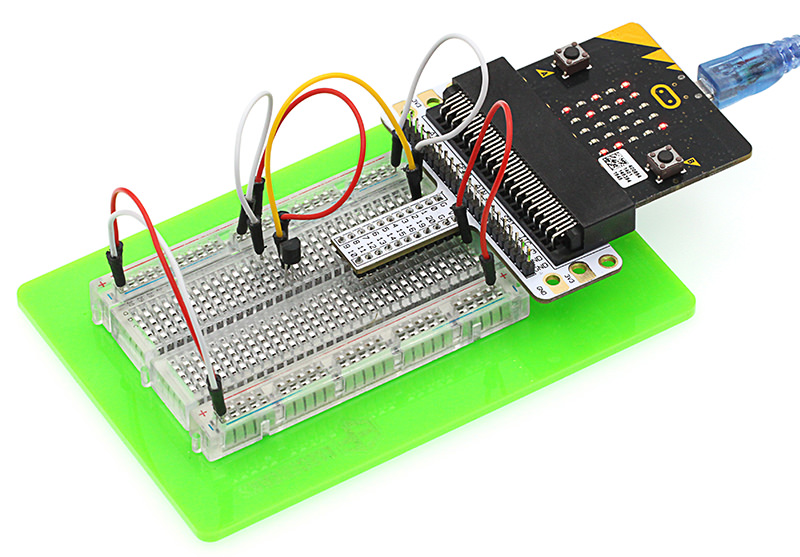
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
編程指令如圖所示:
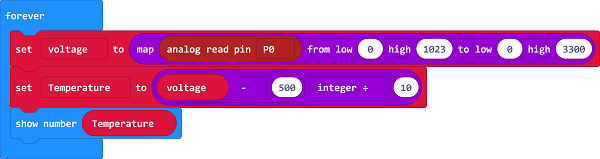
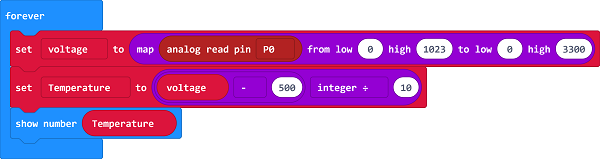
程式的詳細介紹:
1.使用“對應”功能,將感測器透過P0端口檢測到的值確保在0〜1023之間,然後保存在電壓中。
2.將保存在電壓中的值轉換為溫度,並在micro:bit上顯示。
參考
連結:
https://makecode.microbit.org/_AKuYFoDsLJ7D
9.5結果
目前溫度會在micro:bit上顯示。
10.第08課:伺服
10.1介紹
伺服是一種位置(角度)伺服驅動器。它適用於恆定角度變化的控制系統,並且可以保持其狀態。在本實驗中,我們將使用micro:bit使伺服器在行程範圍內循環旋轉。
10.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個TowerPro SG-90迷你舵機(1.6kg)
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
10.3主要零件介紹
伺服
伺服是一套自動控制系統,由直流馬達、減速器、電位器和控制電路組成。透過發送信號可以定義輸出軸的旋轉角度。通常伺服系統具有最大旋轉角度(例如180度)。與一般直流馬達相比,伺服僅在一般直流馬達繞圈旋轉時才在一定角度範圍內旋轉。這是普通直流馬達和伺服馬達之間的主要區別。伺服不能繞圈旋轉。(注意:數位伺服沒有此問題,因為它可以在伺服模式和馬達模式之間切換。)
一般的直流馬達無法提供有關旋轉角度的反饋,但是伺服可以做到。它們的用法也不同。一般的直流馬達以整圈旋轉為動力,而伺服馬達則以一定角度控制它所控制的物體,例如機器人關節。
伺服系統可以透過脈衝來控制,這可以改變其寬度。我們使用控制電纜來傳輸脈衝。脈衝參數有最大值,最小值和頻率。一般而言,伺服參考信號的周期為20ms,寬度為1.5ms。伺服參考信號定義的位置為中間位置。由於伺服具有最大旋轉角度,因此中間位置的定義是從該位置開始,最大值和最小值相同。
最重要的是,不同的伺服可能具有不同的最大旋轉角度,但中間位置的脈衝寬度相同,為1.5ms。伺服參考信號的周期為20ms,寬度為1.5ms。伺服參考信號定義的位置為中間位置。由於伺服具有最大旋轉角度,因此中間位置的定義是從該位置開始,最大值和最小值相同。最重要的是,不同的伺服可能具有不同的最大旋轉角度,但中間位置的脈衝寬度相同,為1.5ms。
注意:Micro:bit官方已將伺服控制代碼加載到積木中。使用Makecode進行編程時,您不必考慮一些複雜的資訊(例如脈衝寬度)。
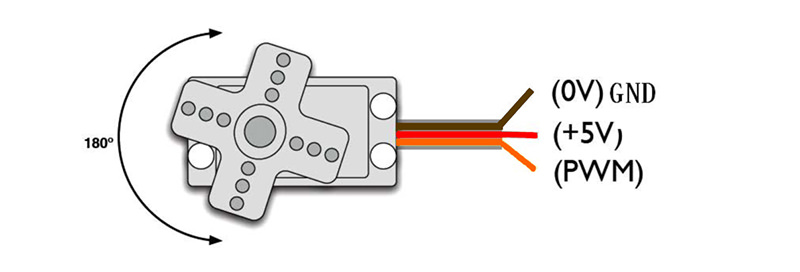
伺服有很多類別。但是,所有伺服都在外部連接了三根電纜。這些電纜通常具有三種不同的顏色(棕色,紅色,橙色)以相互區分。(不同的伺服器品牌可能具有不同的電纜顏色。)棕色電纜用於連接GND,紅色電纜用於正極電源電纜,橙色電纜用於信號電纜。
10.4實驗步驟
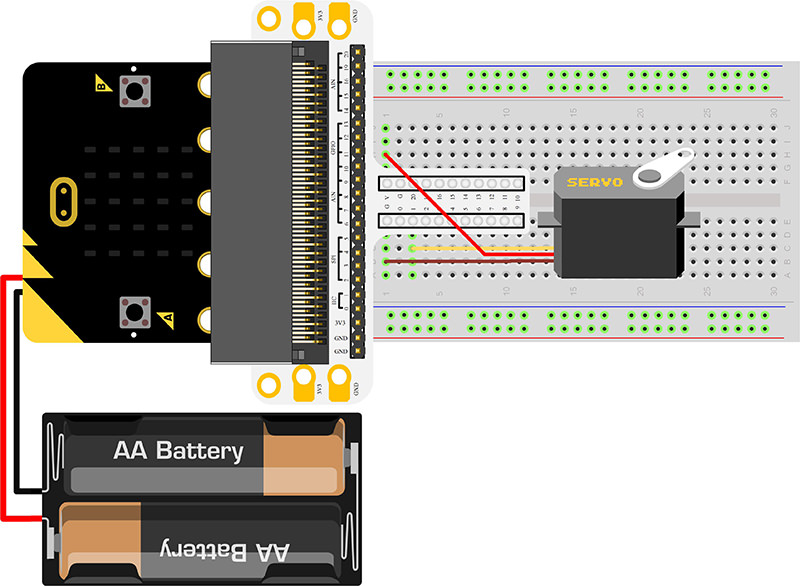
硬體連接
根據下圖連接零件:
1.將伺服系統連接到麵包板連接板的P1端口。
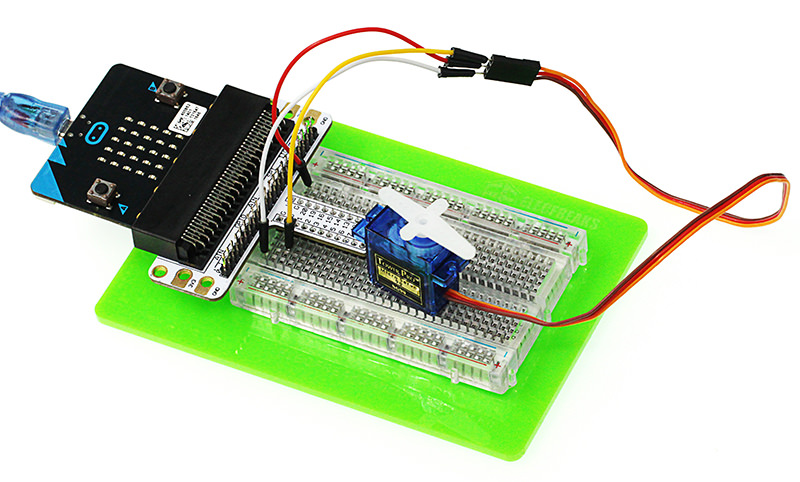
完成連接後,您將看到以下內容:
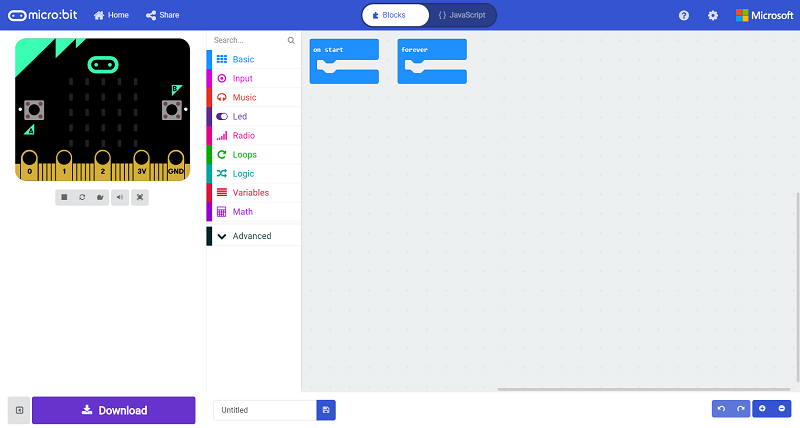
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
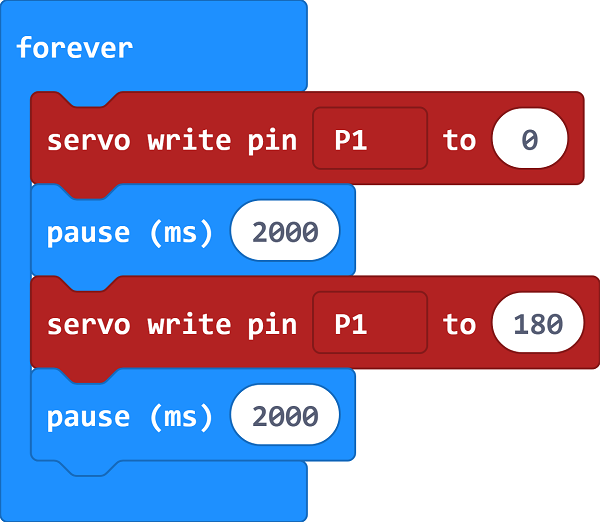
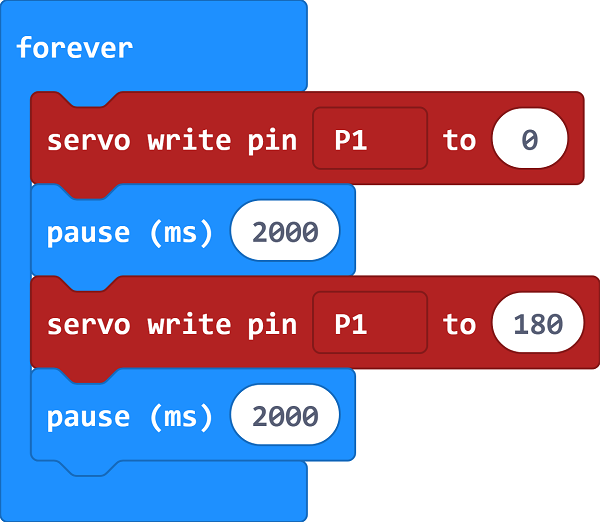
編程指令如圖所示:
程式的詳細介紹:
將伺服寫入腳位P1至0、暫停2000毫秒。
伺服寫入腳位P1至180、暫停2000毫秒。
以上重複執行。
參考
連結:
https://makecode.microbit.org/_52MVspRmRWjc
10.5結果
我們可以看到伺服旋轉角度範圍是0度到180度。
10.6探索
如果要使用溫度感測器和伺服來製作刻度溫度計,該如何設計電路和程式?
11.第09課:蜂鳴器
11.1介紹
蜂鳴器是一種具有集成結構的電子聲音接收器。它被廣泛用作計算機、打印機、複印機、警報器、電子玩具、汽車電子設備、電話等電子產品中的語音設備。在本實驗中,我們將使用micro:bit驅動蜂鳴器和使其聲音像警報歌曲一樣在高頻和低頻之間循環。我們將以條形圖格式在micro:bit上顯示其聲音頻率。
11.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個迷你揚聲器(蜂鳴器)
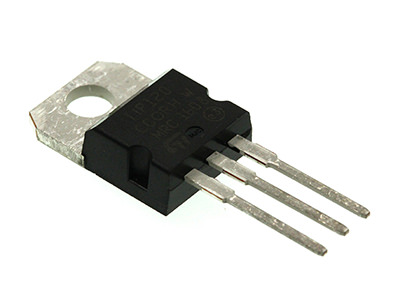
1個TIP 120 NPN晶體管
1個100歐姆電阻
1個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
11.3主要零件介紹
蜂鳴器
蜂鳴器是一種語音設備。它由振動和共振裝置製成。根據控制方式的不同,可以將蜂鳴器分為主動型和被動型。
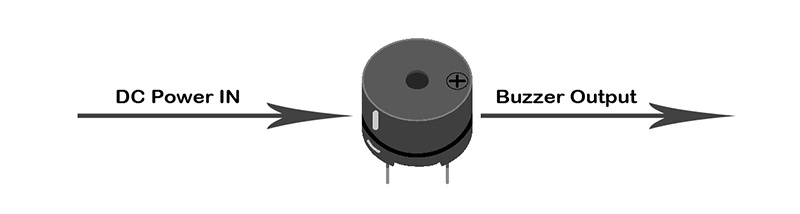
這是有源蜂鳴器的工作原理:
有源蜂鳴器集成了放大及取樣電路,當直流電輸入有源蜂鳴器後,透過電路的轉換,可使共振系統會產生聲音。有源蜂鳴器的工作原理如下圖所示:
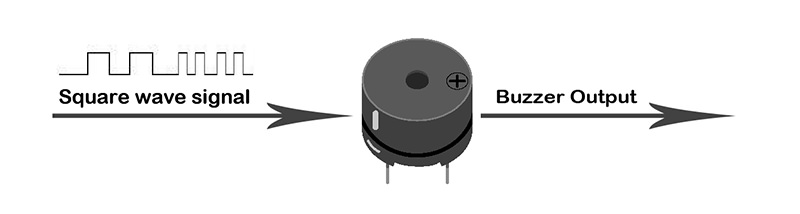
無源蜂鳴器的工作原理是:當方波信號通過蜂鳴器時,其共振裝置會將輸入的方波信號轉換為聲音信號輸出。下面是無源蜂鳴器工作原理示意圖:
注意:在本實驗中,我們僅使用無源蜂鳴器。
晶體管
晶體管是一種用於電流控制的半導體元件。用於將微弱的信號放大為頻率更高的信號。
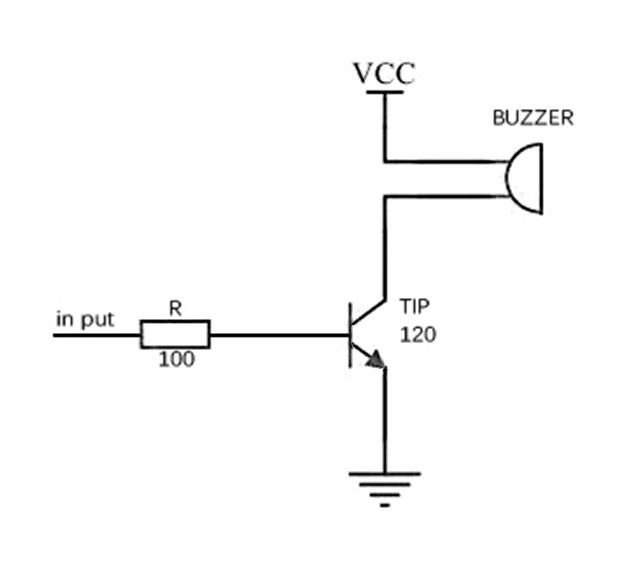
如果將micro:bit產生的PWM信號直接輸入到蜂鳴器,蜂鳴器只會發出微弱的聲音,因為I / O端口的驅動電流通常太微弱,無法直接驅動蜂鳴器等零件。必須使用晶體管來放大PMW信號的電流,使蜂鳴器能夠正確警報。 下圖是使用晶體管驅動蜂鳴器的典型應用電路圖:
11.4實驗步驟
硬體連接
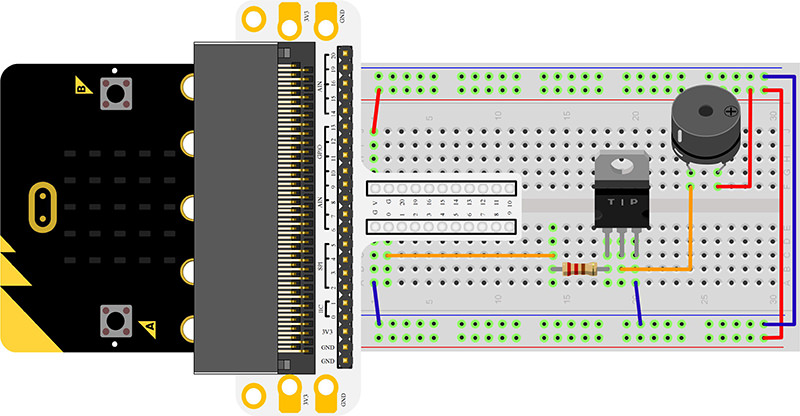
根據下圖連接零件:
1.將蜂鳴器,100Ω電阻和晶體管串聯,然後連接到P0端口。
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
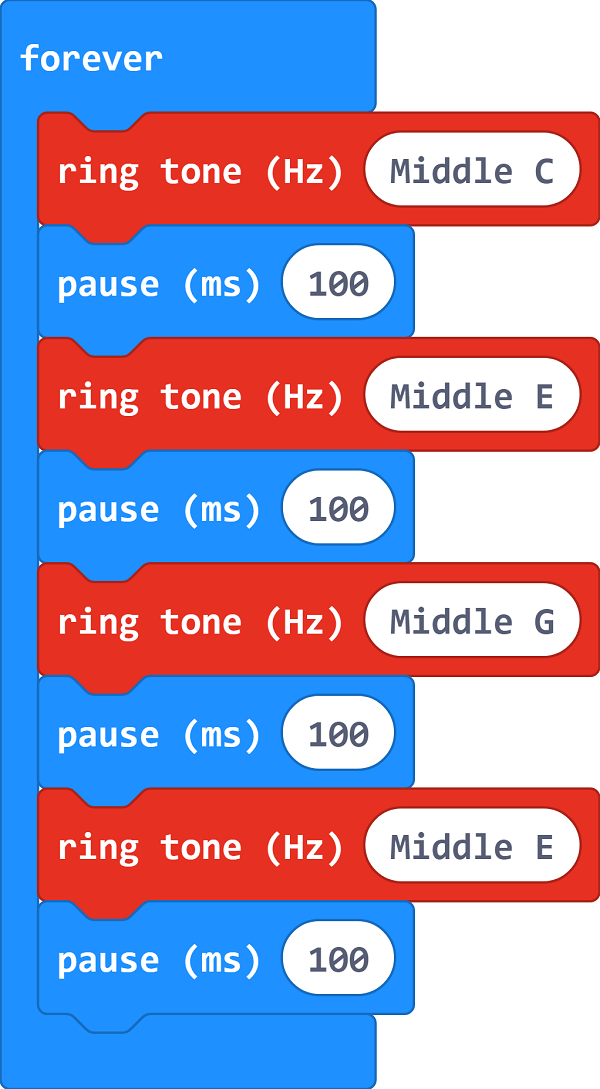
編程指令如圖所示:
程式的詳細介紹:
1.在代碼中發出C聲音並暫停100秒;以類似方式對EGE進行編程。
參考
連結:
https://makecode.microbit.org/_DdPPjDCdmM1a
11.5結果
蜂鳴器發出的聲音在高頻和低頻之間變化。我們可以在micro:bit上看到頻率的條形圖。
11.6探索
如果我們想製造一個帶有溫度感測器和蜂鳴器的高溫警報裝置,該如何設計電路和程式?
12.第10課:馬達
12.1介紹
馬達是一種將電磁感應中的定律轉換為動能的裝置。在本實驗中,我們將使用開關來控制馬達的啟動和停止。
12.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個5V微型馬達
1個TIP 120 NPN晶體管
1個1N4007二極管
1個100歐姆電阻
n個Breadborad跳線(65個/包)
2個鱷魚夾線
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
12.3主要零件介紹
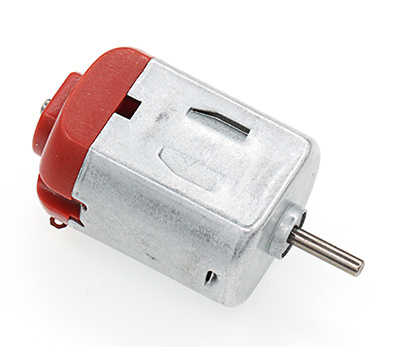
馬達
馬達是一種可以根據電磁感應定律將電能轉換為動能的裝置。馬達有很多類別,在我們的實驗中,我們使用的馬達是直流馬達。當我們向馬達的兩個端子提供直流電壓時,它將旋轉。電壓越高,旋轉速度越快。
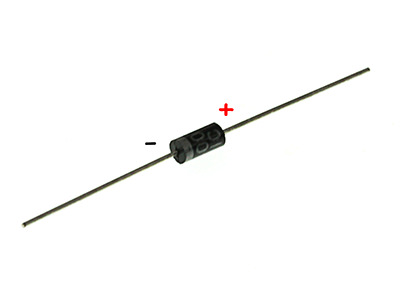
二極體
二極管是一種具有兩個極性的組件:一個用於正極,另一個用於負極。它只允許電流從正極移動到負極。我們可以將其視為電子止回閥。對於普通二極管,我們可以從燈管的顏色判斷其極性,
白色的端子為負極。
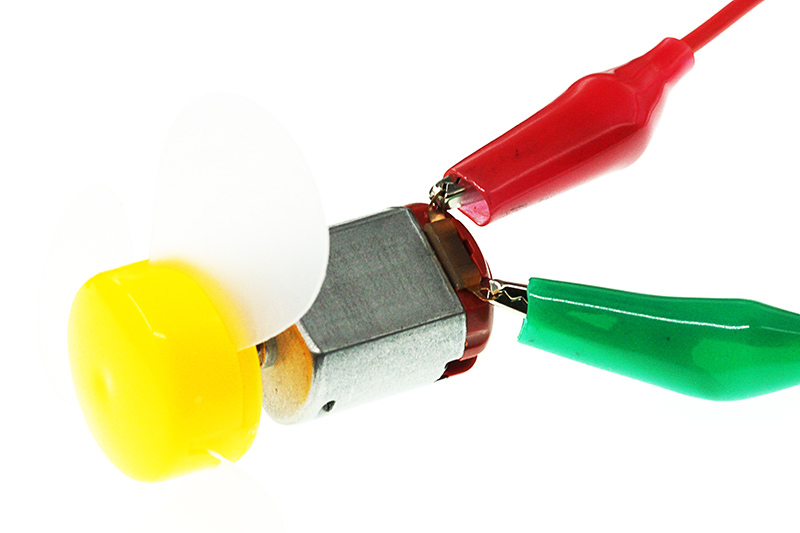
鱷魚夾線
與跨接電纜的使用類似,當某些組件不適合使用跨接電纜進行連接時,請使用鱷魚夾線。
在本實驗中,我們使用鱷魚夾電線連接馬達。
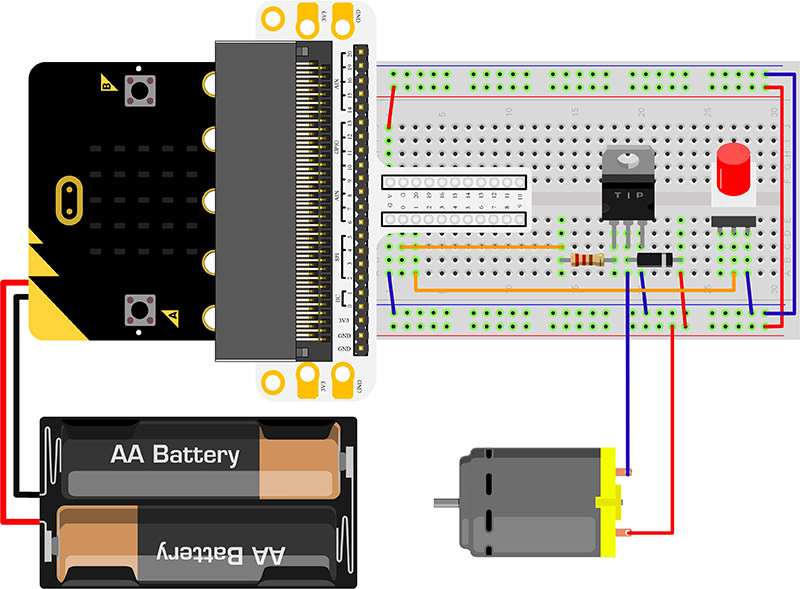
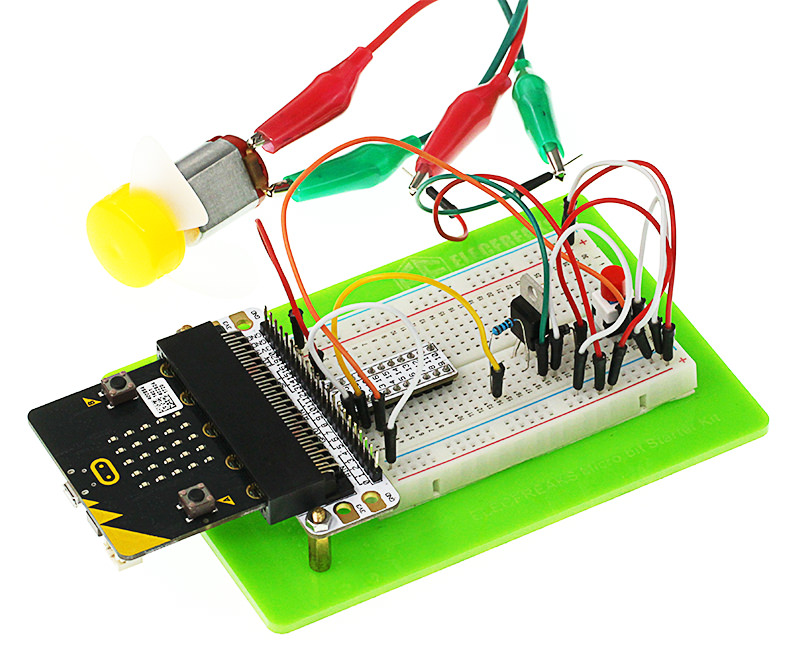
12.5硬體連接
根據下圖連接零件:
micro:bit IO端口上的驅動器電流太小,無法直接連接馬達。這時我們必須使用三極管來放大IO端口的電流。使用三極管放大IO端口上的電流的電路圖與上一章“ micro:bit實驗09:Buzzer-Elecfreaks mirco:bit入門工具包課程”的電路圖非常相似。唯一的區別是馬達的兩個端子上都有兩個二極管。該電路中的二極管稱為續流二極管。
馬達內部有一個線圈。當電流流過線圈時,它將在兩個端子上產生感應電動勢。當電流消失時,感應電動勢將向電路中的組件生成反向電壓,可能會損壞這些組件。續流二極管反並聯連接線圈的兩個端子。當我們切斷電感線圈的電源時,感應電動勢不會立即消失。殘餘力將通過二極管釋放。這是典型的保護設計。
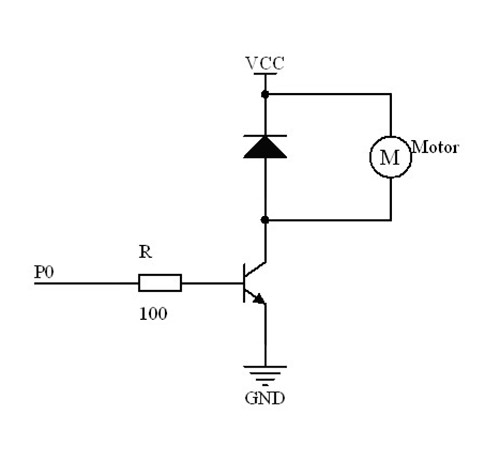
以下是使用三極管放大IO端口電流的局部電路圖:
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
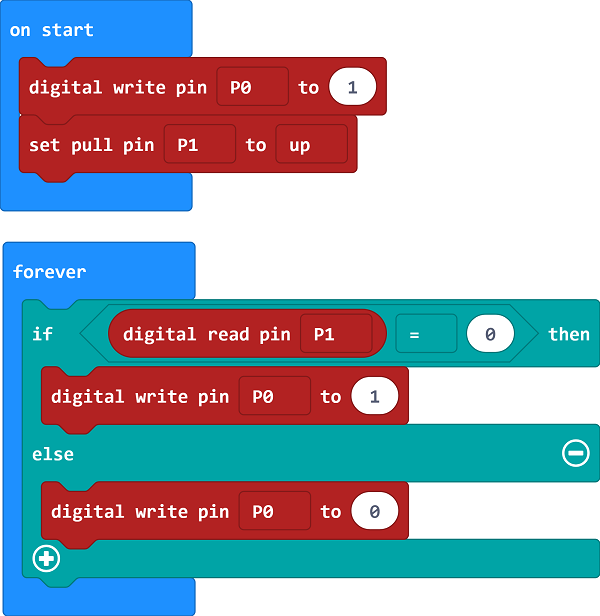
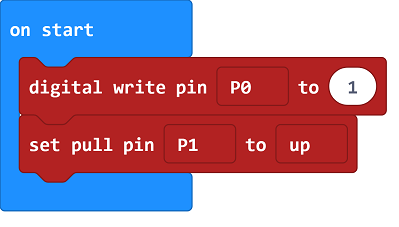
編程指令如圖所示:
程式的詳細介紹:
1.將數位信號寫入引腳P0至1,並設置P0端口在一個高水平,以正常地識別按鈕的信號。
2.按下按鈕時,將P0設置為1;放開時,將其設置為0。
參考
連結:
https://makecode.microbit.org/_CAUDezEJrVtc
12.6結果
按下按鈕,馬達開始旋轉;再按一次,它將停止移動。注意:micro:bit電源的電壓僅3V,按下按鈕時,馬達可能無法啟動。如果發生這種情況,請撥動馬達的風扇葉片,使其能夠正常地運作。
12.7探索
如果要使用電位器來控制馬達速度,那麼如何設計電路和程式?
13.第11課:彩虹LED
13.1介紹
8顆RGB彩虹LED光圈是以ws2812b燈珠為基礎,它的最大特點是單IO控制和無限級聯連接。在本實驗中,我們將使用micro:bit驅動8顆RGB彩虹LED光圈並實現彩虹色漸變。
13.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個8顆RGB彩虹LED光圈
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
13.3主要零件介紹
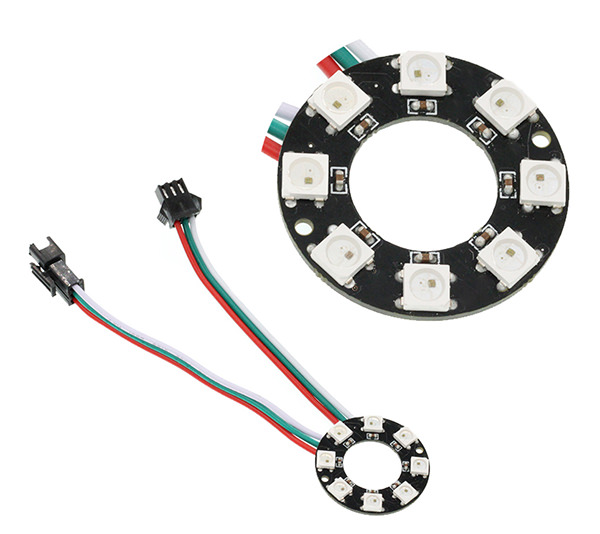
8顆RGB彩虹LED光圈
8顆
RGB彩虹LED光圈
是由級聯連接的8個ws2812b燈珠製成的LED光圈。Ws2812b是一種智能的外部控制LED光源,具有集成的控制電路和發光電路。與5050LED燈珠外觀相同。
數位協定採用單線歸零碼的通訊方式。恢復像素點後,DIN將接收從控制器發送的數據。一旦接收到的第一個24bit數據被第一個像素點提取後,它將被發送到像素點的內部數位鎖存儲設備,而其餘數據經過內部變換處理電路放大後通過DO端口開始轉發輸出給下一個像素點。每次通過像素點傳輸時,信號將減少24bit。像素點採用自動變換轉發技術,因此像素級聯連接數量不受信號傳輸的限制,而僅受傳輸速度的限制。
LED具有驅動電壓低、節能環保、散射角寬、一致性好、超長壽命等優點。將控制電路集成到LED上,電路將變得更加簡單,易於安裝且體積更小。
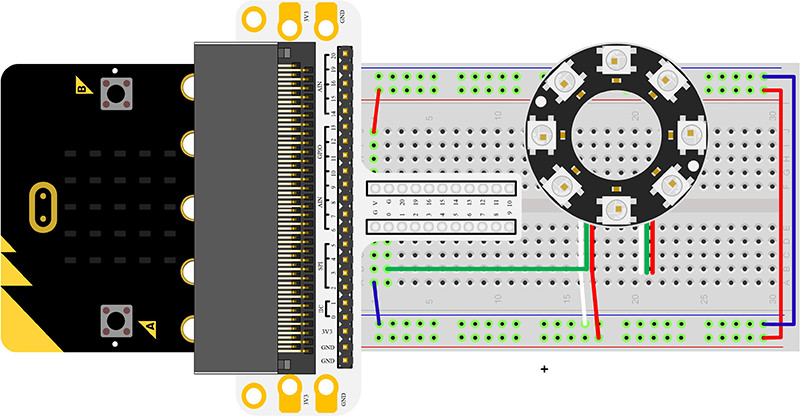
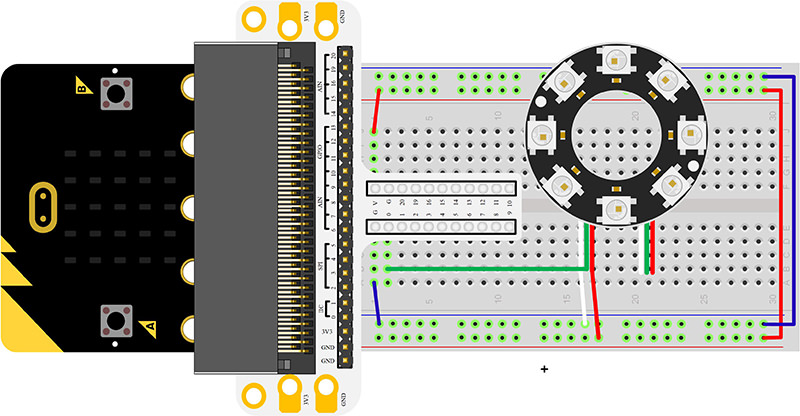
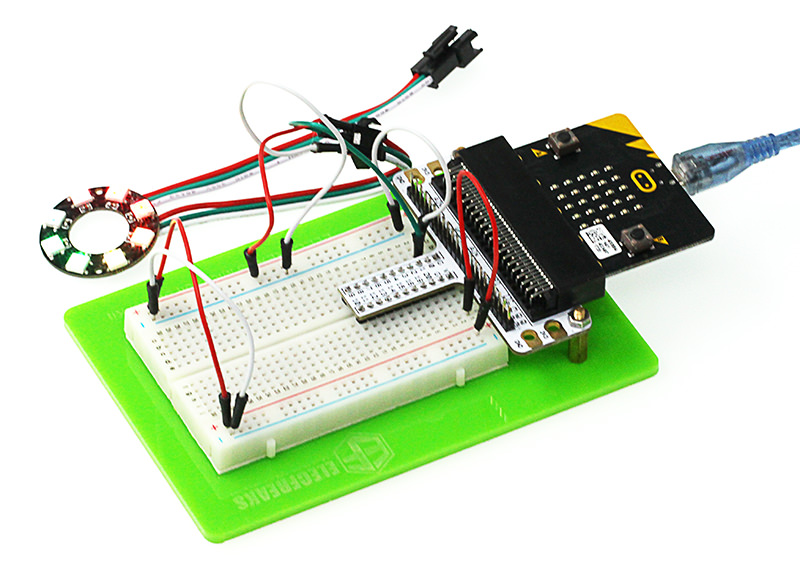
13.5硬體連接
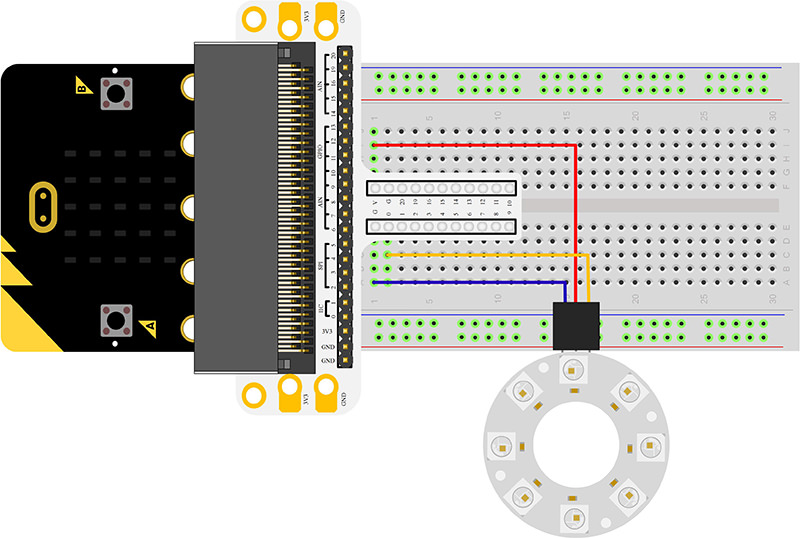
根據下圖連接組件:
1.將LED光圈的信號線連接到麵包板連接板的P0端口。
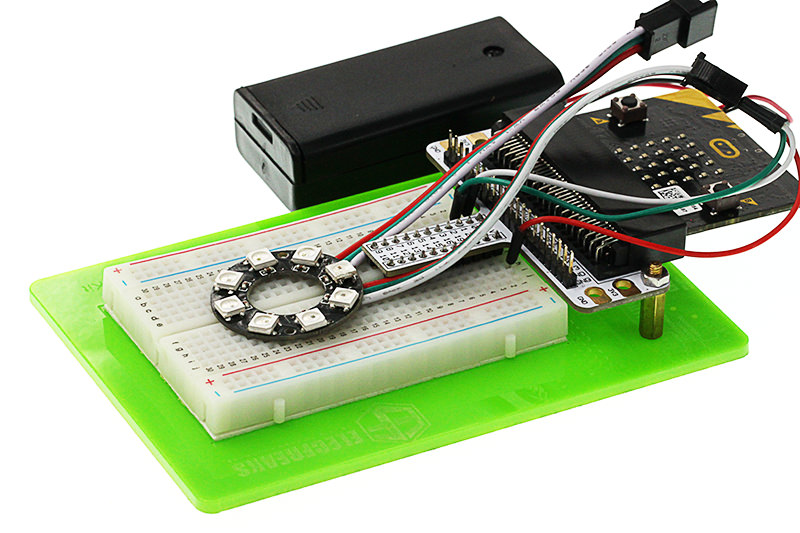
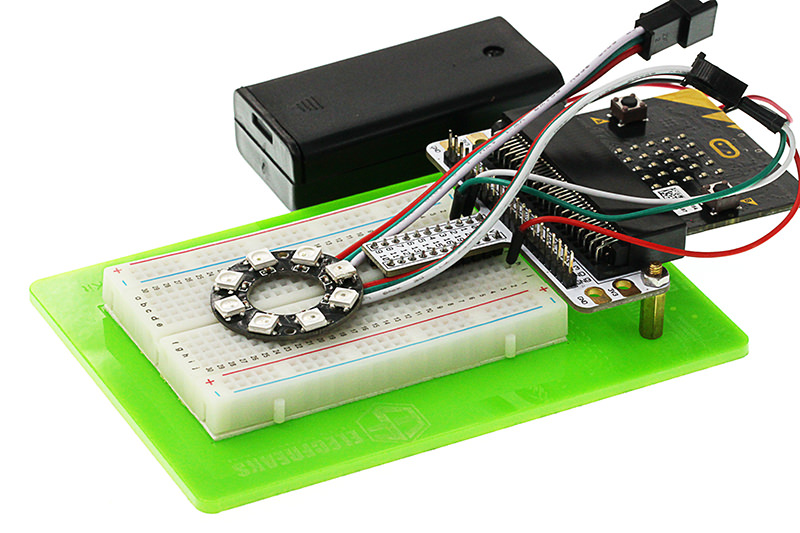
注意:光圈上引出了兩根電纜。一個是DI,另一個是DO。我們應該連接DI。連接後,我們可以看到:
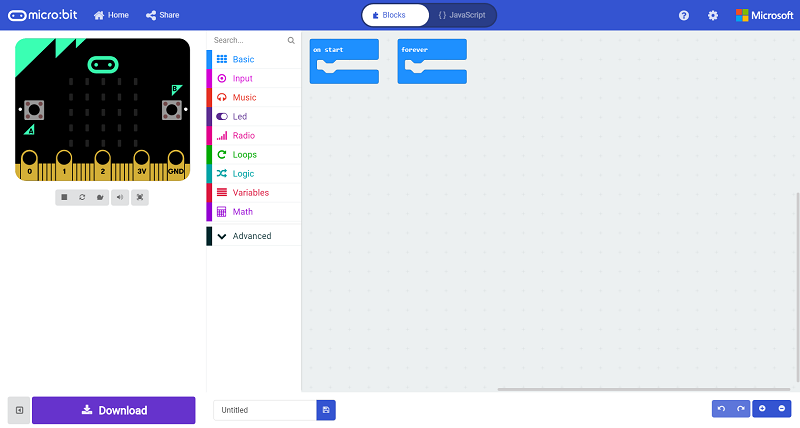
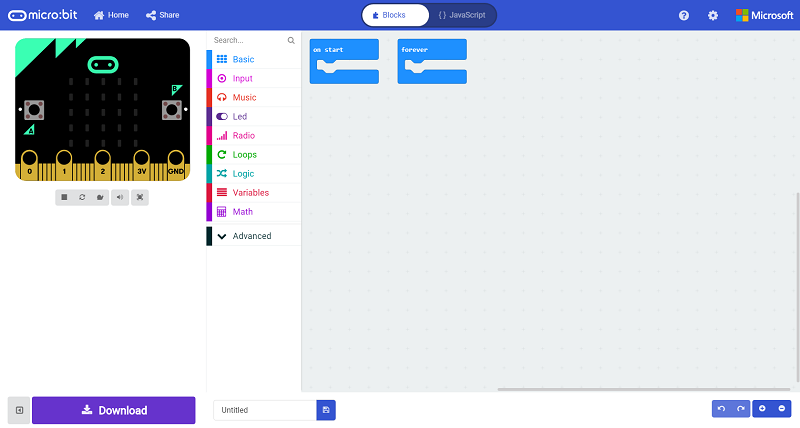
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
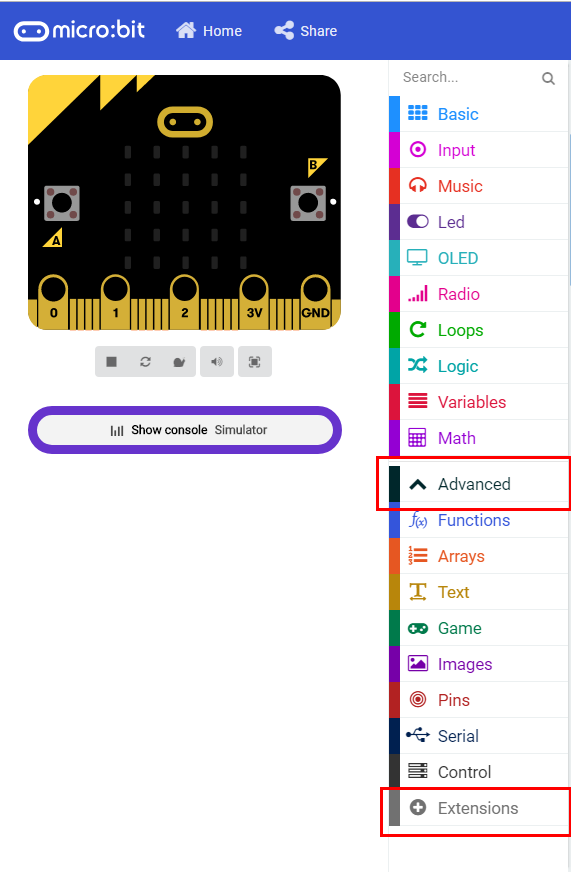
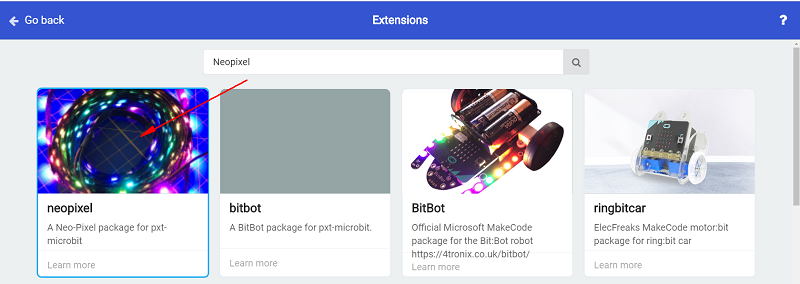
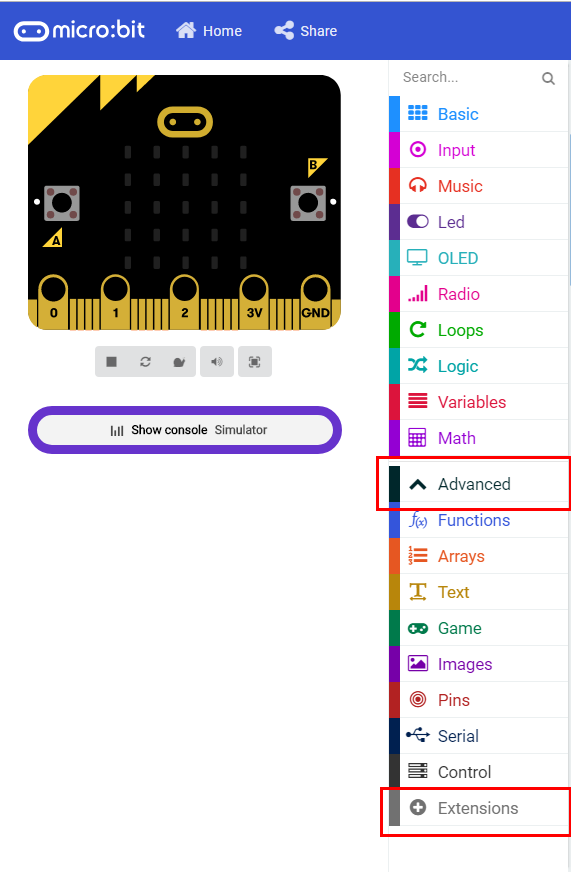
添加套件
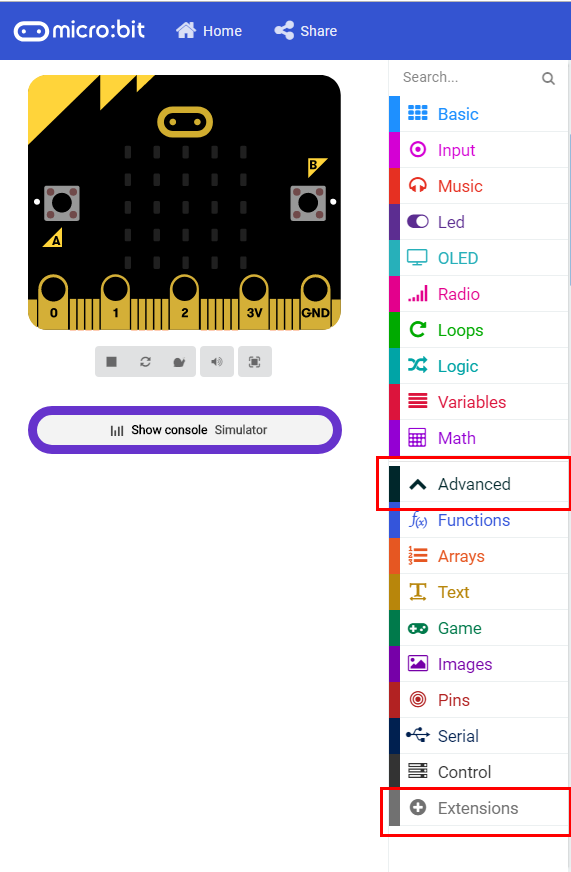
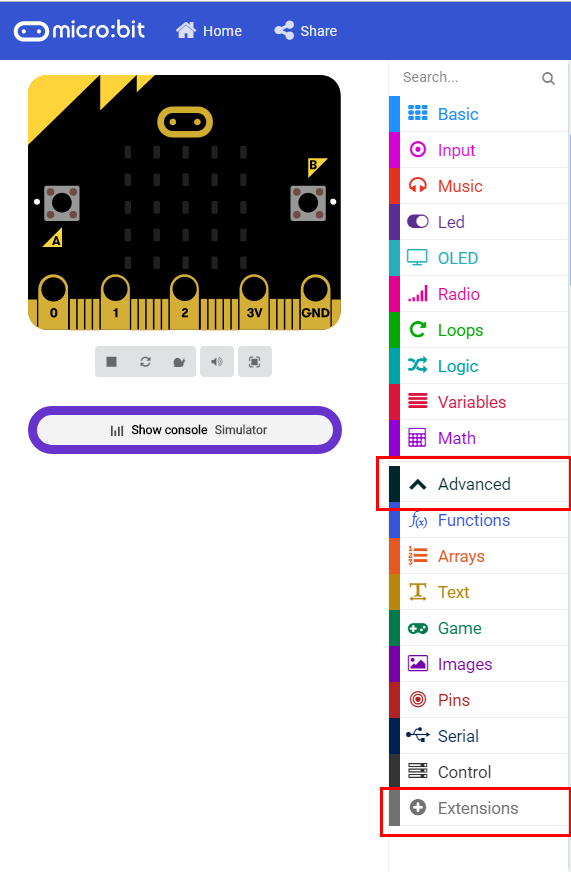
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
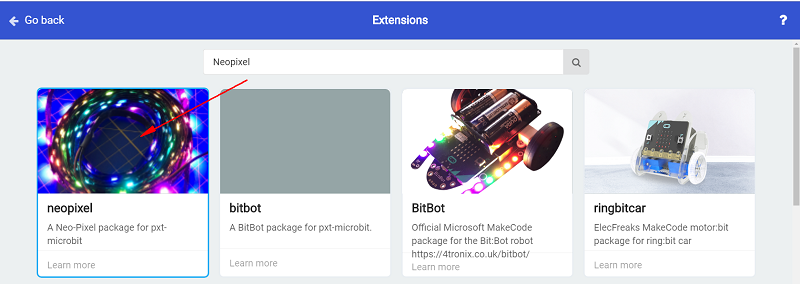
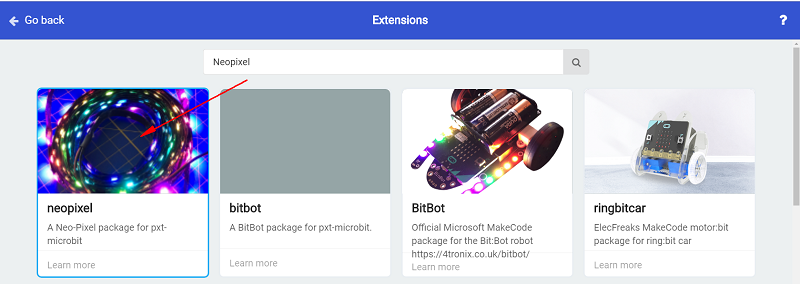
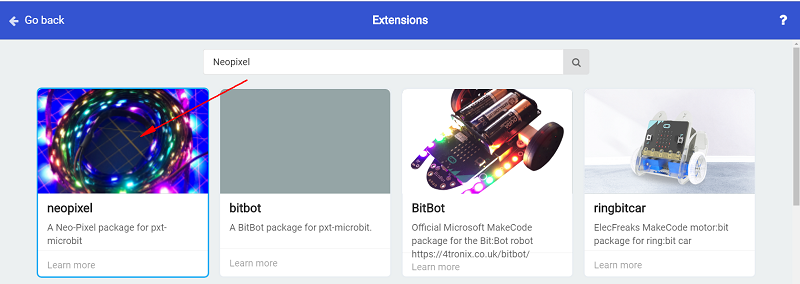
點擊“Extensions”,在對話框中搜索“ neopixel”,然後下載“ neopixel”。
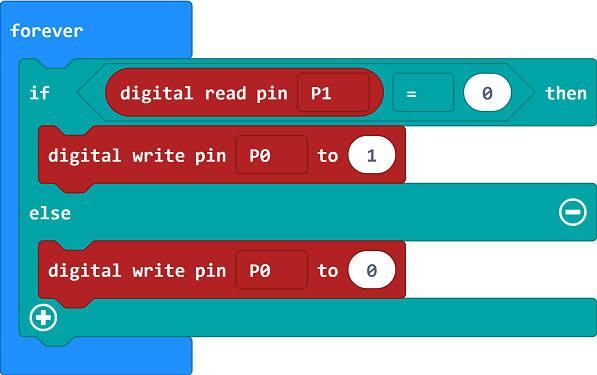
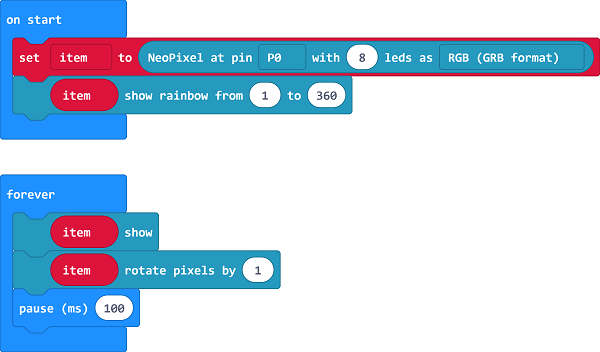
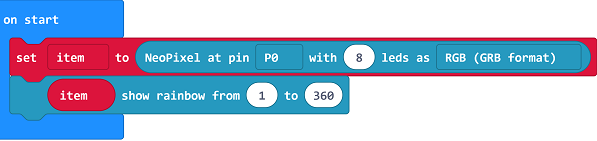
編程指令如圖所示:
程式的詳細介紹:
1.初始化燈條8顆LED為RGB模式,並將引腳設置為P0端口。
2.顯示RGB的顏色並設置顏色漸變。
參考
連結:
https://makecode.microbit.org/_LybdqfauX3TR
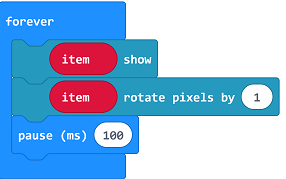
13.6結果
我們可以看到8顆RGB彩虹LED光圈的光以彩虹色旋轉。
13.7探索
想像一下,光圈是一個大眼睛,為了使其閃爍,那麼如何設計電路和程式?
14.第十二課:加速度感測器
14.1介紹
micro:bit集成了包括加速度感測器在內的多個感測器。今天,我們將使用加速度感測器製造水平儀,並以條形圖格式在LED光圈上顯示傾斜度。
14.2零件清單
硬體:
1個micro:bit板
1個USB電纜
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個8顆RGB LED光圈
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
14.3主要零件介紹
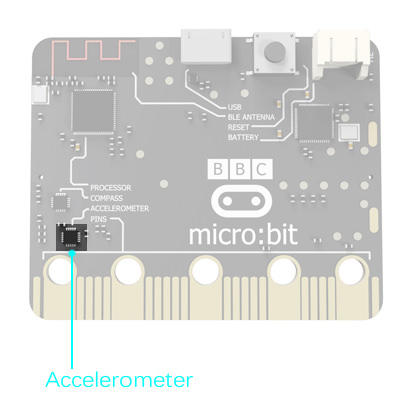
加速度感測器
您的micro:bit上有一個加速度感測器,可檢測micro:bit的速度變化。它將類比訊息轉換為可以在micro:bit程式中使用的數位形式。輸出以毫克為單位。該裝置還將檢測少量標準動作,例如搖動,傾斜和自由落體。
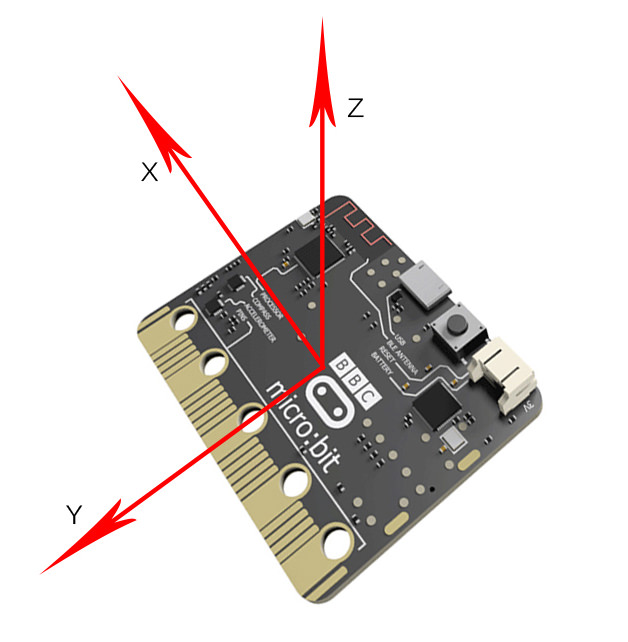
加速度感測器的相應X,Y,Z軸方向如下所示:
14.4實驗步驟
硬體連接
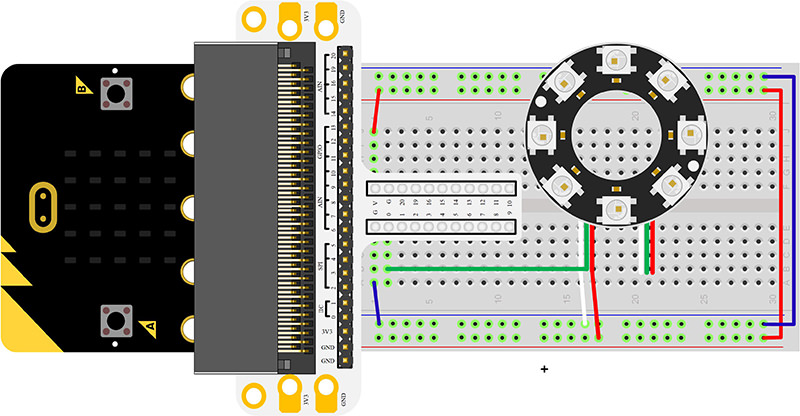
根據下圖連接零件:
將LED光圈的信號線連接到麵包板連接板的P0端口。
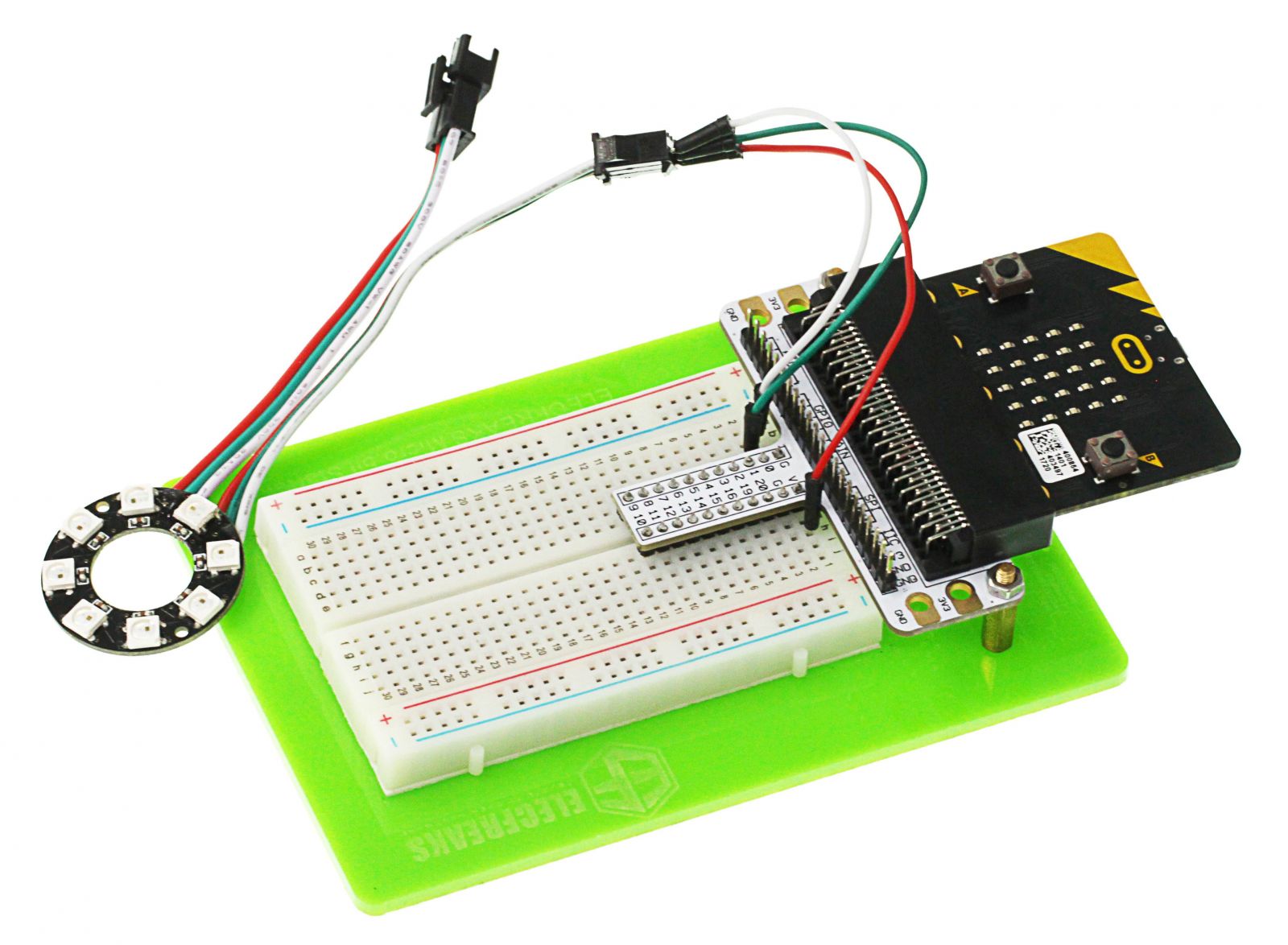
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
添加套件
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
點擊
“Extensions”,在對話框中搜索“ neopixel”,然後下載“ neopixel”。
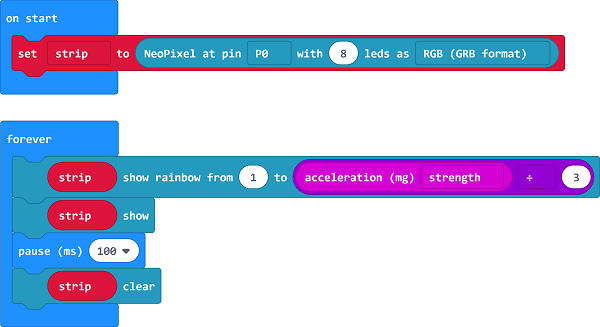
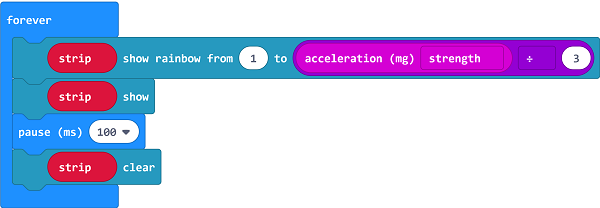
編程指令如圖所示:
程式的詳細介紹:
初始化燈條8顆LED為RGB模式,並將引腳設置為P0端口。
設置燈光的顏色會隨著加速速度而改變。
參考
連結:
https://makecode.microbit.org/_0Y07f36Y77sa
14.5結果
LED光圈隨著micro:bit的移動以不同的顏色發亮。
14.6探索
如果我們要設置4個LED依序發亮,我們如何設計電路和程式?
15.第13課:指南針
15.1介紹
你知道指南針嗎?相信大多數人都曾經玩過。今天我們將使用micro:bit創建一個指南針,並在LED光圈上顯示其方向。想知道該怎麼做嗎?只需閱讀以下文章,然後按照步驟進行即可。我們走吧!
15.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個8顆RGB彩虹LED光圈
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
15.3主要零件介紹
指南針
這裡的指南針實際上是一個磁力計。磁力計是提供磁場強度感應的獨立芯片。
在標準運作時間的軟體計算程式使用主板的加速度感測器去將這些讀數轉換成以主板為導向的獨立指南針讀數。
使用前必須先對指南針進行校準,並且運行時軟體會自動啟動校準過程。該設備透過I2C總線連接到應用處理器。
15.4實驗步驟
硬體連接
根據下圖連接零件:
將LED光圈的信號線連接到麵包板連接板的P0端口。
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
添加套件
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
點擊
“Extensions”,在對話框中搜索“ neopixel”,然後下載“ neopixel”。
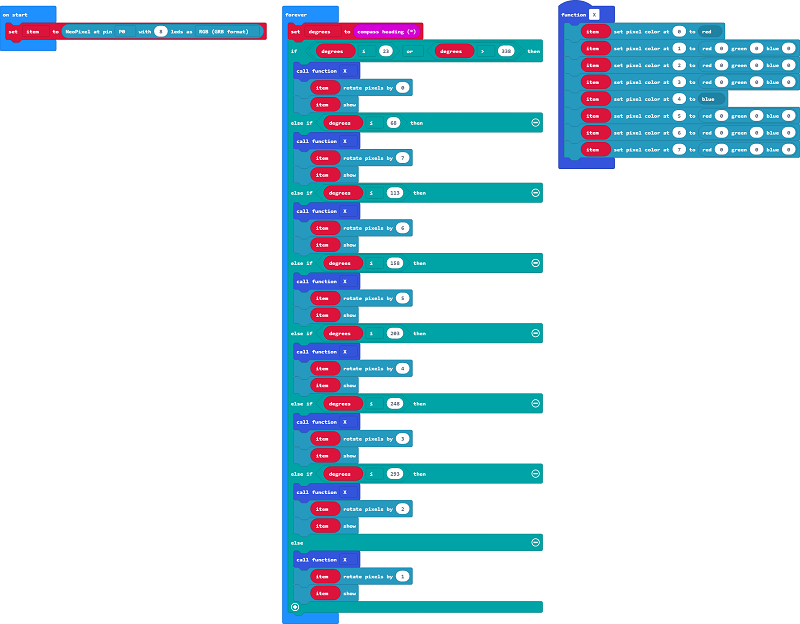
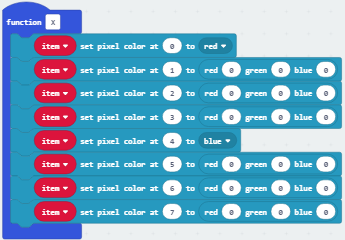
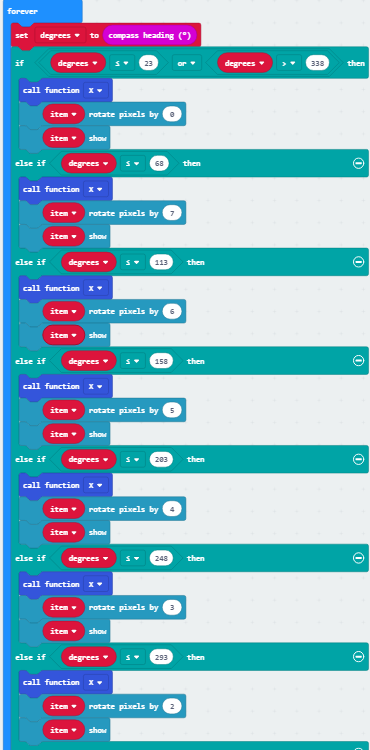
編程指令如圖所示:
程式的詳細介紹:
1.將P0端口設置為控制光圈的引腳,並將其顏色模式設置為RGB。
2.設置功能使第1個和第5個LED指示燈亮紅色和藍色。
3.讀取指南針檢測到的值,根據其更改LED的顏色。
參考
連結:
https://makecode.microbit.org/_L88UK5VdmR9A
15.5結果
旋轉整個設備,您會看到8顆RGB彩虹LED光圈始終指向同一方向。 注意:每次您開始使用指南針時(例如剛打開micro:bit時),micro:bit將自動開始校準指南針。它將要求您透過傾斜micro:bit畫一個圓。 如果您在金屬附近校准或使用指南針,則可能會使micro:bit混淆。
15.6探索
如果該實驗不使用8顆RGB彩虹LED光圈,而是使用micro:bit上顯示的箭頭作為指示器,那麼如何設計電路和程式?
16.第十四課:環境光
16.1介紹
在我們的部落格“ micro:bit實驗04:光電管-Elecfreaks mirco:bit入門工具包課程”中,我們在外部連接了光電管以感應光。實際上,micro:bit在內部集成了一個光檢測設備。今天我們將使用內部光傳感器進行實驗。當外部環境中的光線相對較暗時,我們將使彩虹LED光圈發亮。
16.2零件清單
硬體:
1個micro:bit板
1個USB傳輸線
1個micro:bit麵包板連接板
1個透明麵包板-83 * 55毫米
1個8顆RGB LED光圈
n個Breadborad跳線(65個/包)
提示:如果需要上述所有零件,可以參考Elecfreaks micro:bit入門套件。
16.3主要零件介紹
您可能會對micro:bit在沒有任何光傳感器的情況下如何感測光感到好奇。我們來看一段有關在micro:bit網站上顯示的內容:
顯示屏是一個5x5的LED陣列。它作為3x9矩陣連接到micro:bit。運行時軟件會高速重複刷新此矩陣,以使其處於用戶視覺範圍內,並且不會察覺到閃爍。通過重複將某些LED驅動引腳切換為輸入並採樣電壓衰減時間(大致與環境光水平成正比),該LED矩陣還可用於感測環境光。
真是太神奇了!除了發光能力外,micro:bit還可以感應光!因為LED經常被用作發光體,因此很容易忘記它們本質上是光電二極管,因此同樣是光檢測器。如果將其合併到LED驅動器電路中,也不會產生額外的硬體成本。
16.5硬體連接
根據下圖連接零件:
將LED光圈的信號線連接到麵包板連接板的P0端口。
完成連接後,您將看到以下內容:
軟體編程
點擊連結以打開
Microsoft Makecode
,在編輯器中編寫以下代碼。
添加套件
在MakeCode的選擇中點擊“Advanced”以找到更多選擇。
點擊
“Extensions”,在對話框中搜索“ neopixel”,然後下載“ neopixel”。
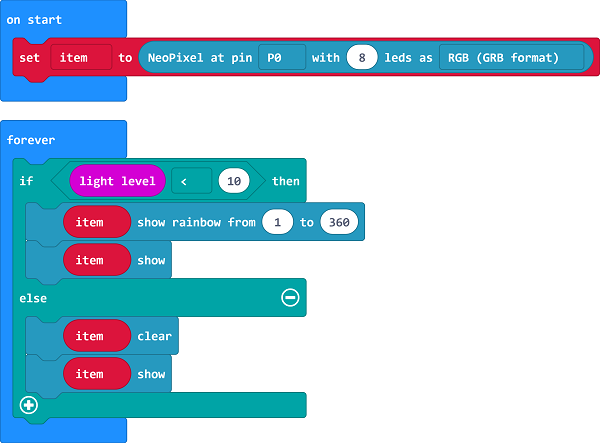
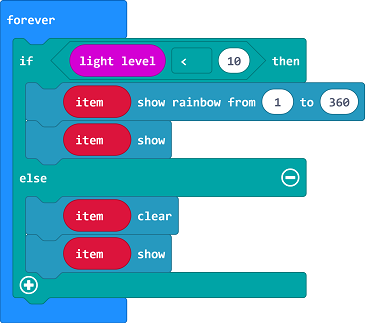
編程指令如圖所示:
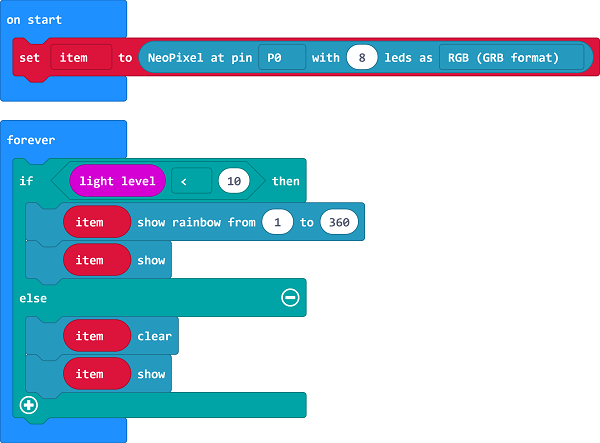
程式的詳細介紹:
1.將P0端口設置為控制光圈的引腳,並將其顏色模式設置為RGB。
2.當micro:bit接收的光線感測值低於10時,光圈會以多種顏色點亮。
參考
連結:
https://makecode.microbit.org/_Cxo28oDKjLyY
16.6結果
在黑暗中時,LED光圈將打開;處於明亮狀態時,LED光圈將關閉。
16.7探索
如果要使光圈以彩虹色旋轉發亮,那麼該如何設計電路和程式?
返回列表
電話:04-2375-3535
傳真:04-2256-9949
統編:90386785
E-mail:service@oursteam.com.tw
LINE ID:@oursteam
學校機關報價
經銷通路報價
客製產品規劃
師資培訓課程
教師研習辦理
社團營隊活動
關於我們
代理商品
教學資源
最新消息
聯絡我們
購物說明
訂單查詢
付款回覆
Copyright © 奧斯丁國際 All Rights Reserved.
 電話:04-2375-3535
電話:04-2375-3535
































.png)
.jpeg)


.jpeg)






.jpeg)