零件清單
1. Classroom Sensor Pack官方使用手冊
2. Basic:bit
3. LED*2 (紅、綠)
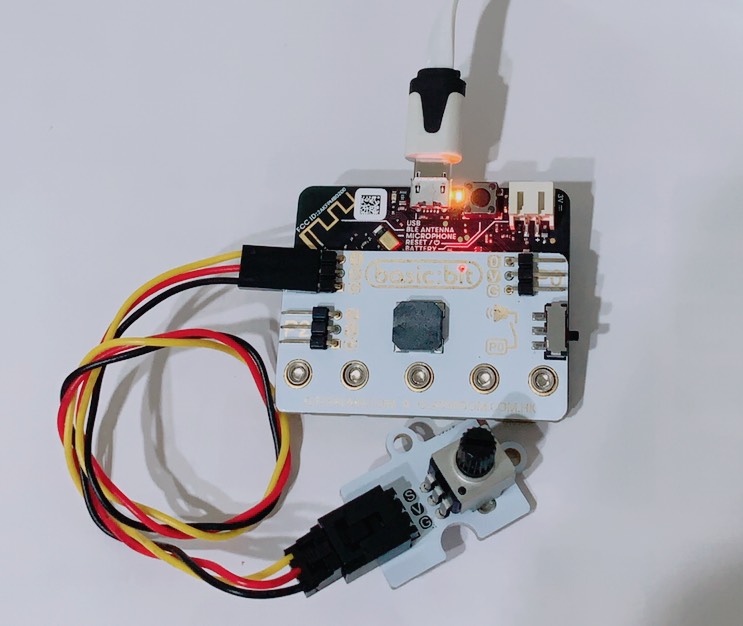
4. Potentiometer 電位器
5. PIR sensor 紅外線感測器
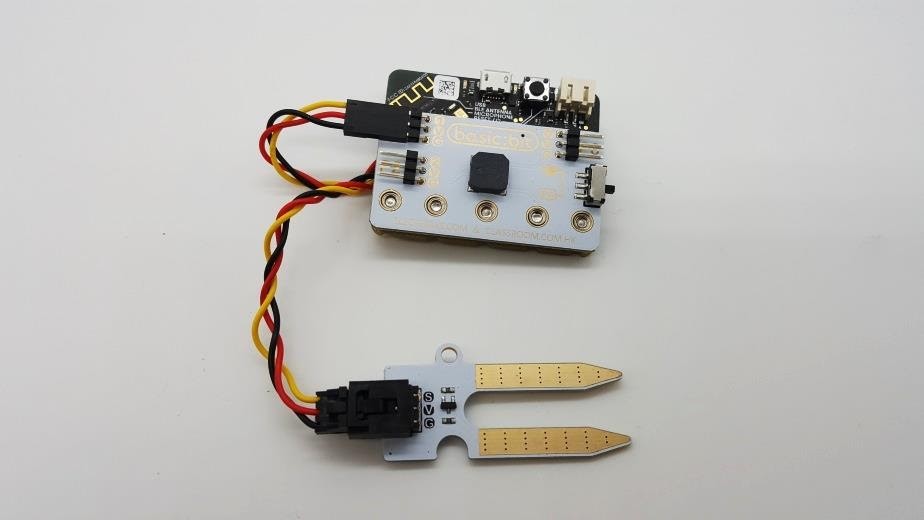
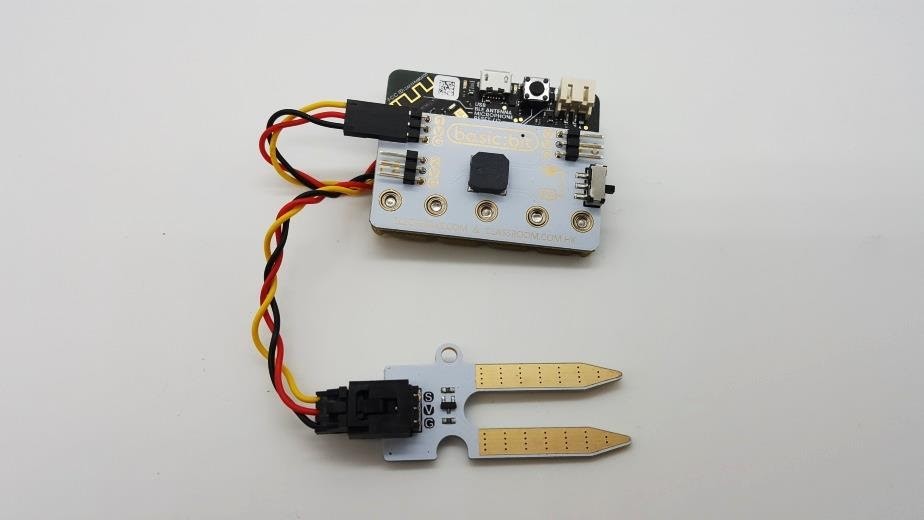
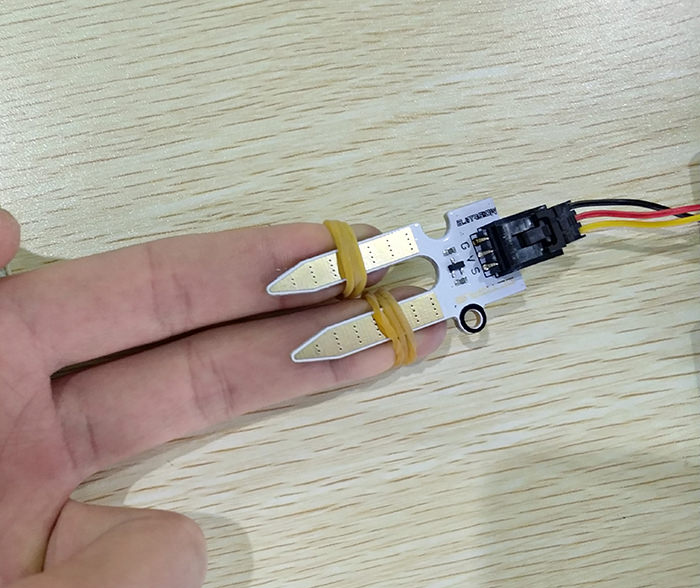
6. Soil Moisture 土壤溼度感測器
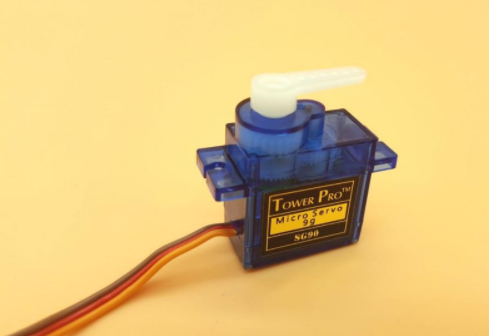
7. Servo 伺服馬達
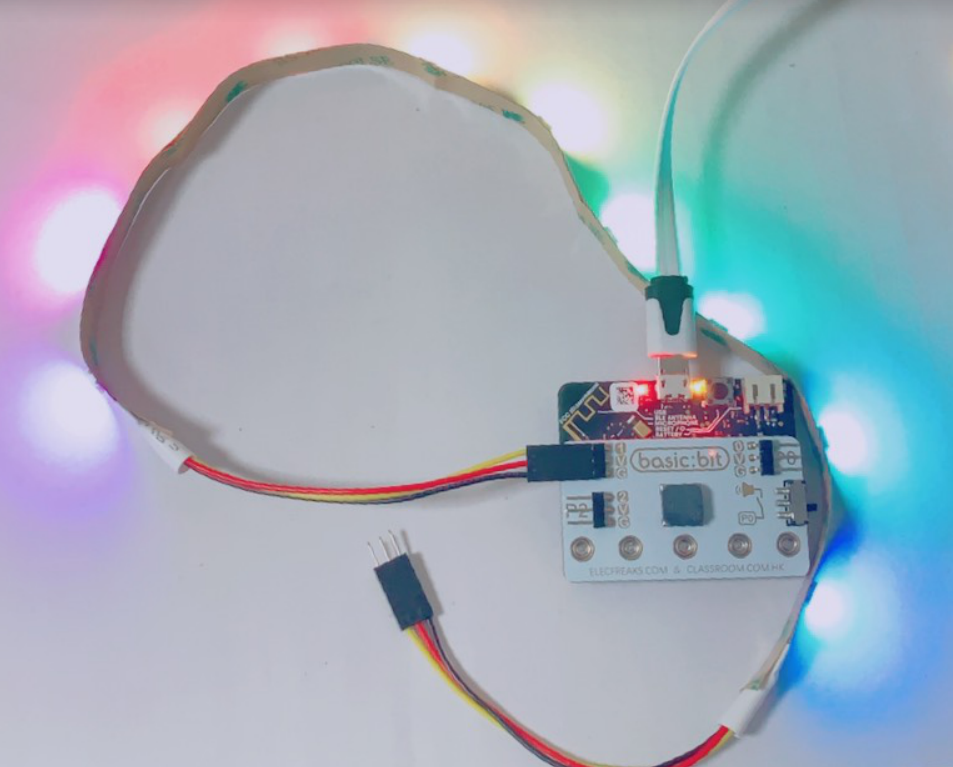
8. Rainbow LED 全彩LED燈條
(每個感測器皆附一條專用連接線)

Basic:bit介紹
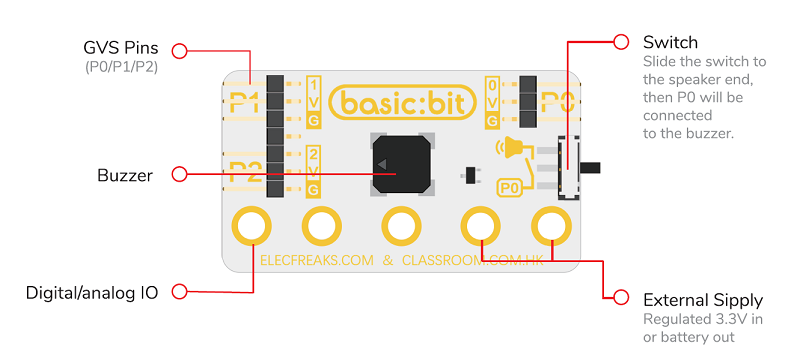
Basic:bit是micro:bit的基礎擴充板,內建蜂鳴器和三組GVS引腳(P0 / P1 / P2)。每組GVS引腳分別在micro:bit上導出IO埠、3V埠和GND埠。體積小且結構簡單,足夠完成98%的micro:bit應用。
特色
- 體積輕巧,設計巧妙,能與micro:bit完美搭配。
- 僅需要使用螺絲釘即可輕鬆與micro:bit連接並導出電源孔和IO埠。
- 在micro:bit上導出P0、P1、P2、3V和GND埠。
- 讓使用者僅透過上述的三個IO埠完成98%的micro:bit應用。
- 在Basic:bit上就能開關蜂鳴器。
如何將basic:bit組裝到micro:bit?請注意,若您的micro:bit為V2版本,請先將basic:bit背面的圓形防撞貼撕下後再進行安裝。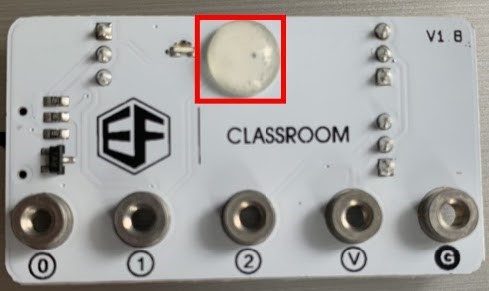 1.將basic:bit的正面貼合micro:bit的背面。
1.將basic:bit的正面貼合micro:bit的背面。 2.從micro:bit的正面鎖緊5個螺絲。順序:由Pin 0依序鎖至GND(由左至右),注意螺絲必須完全鎖緊不留縫隙。
2.從micro:bit的正面鎖緊5個螺絲。順序:由Pin 0依序鎖至GND(由左至右),注意螺絲必須完全鎖緊不留縫隙。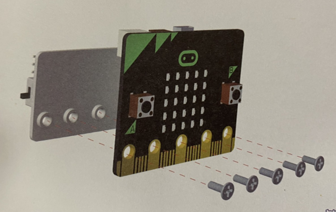 完成圖
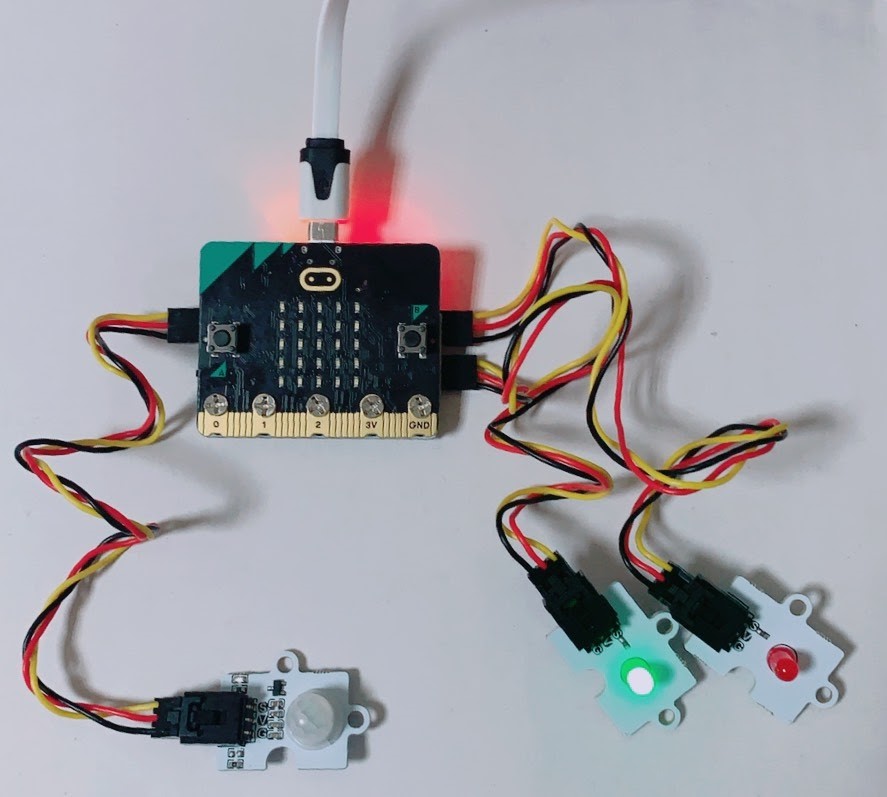
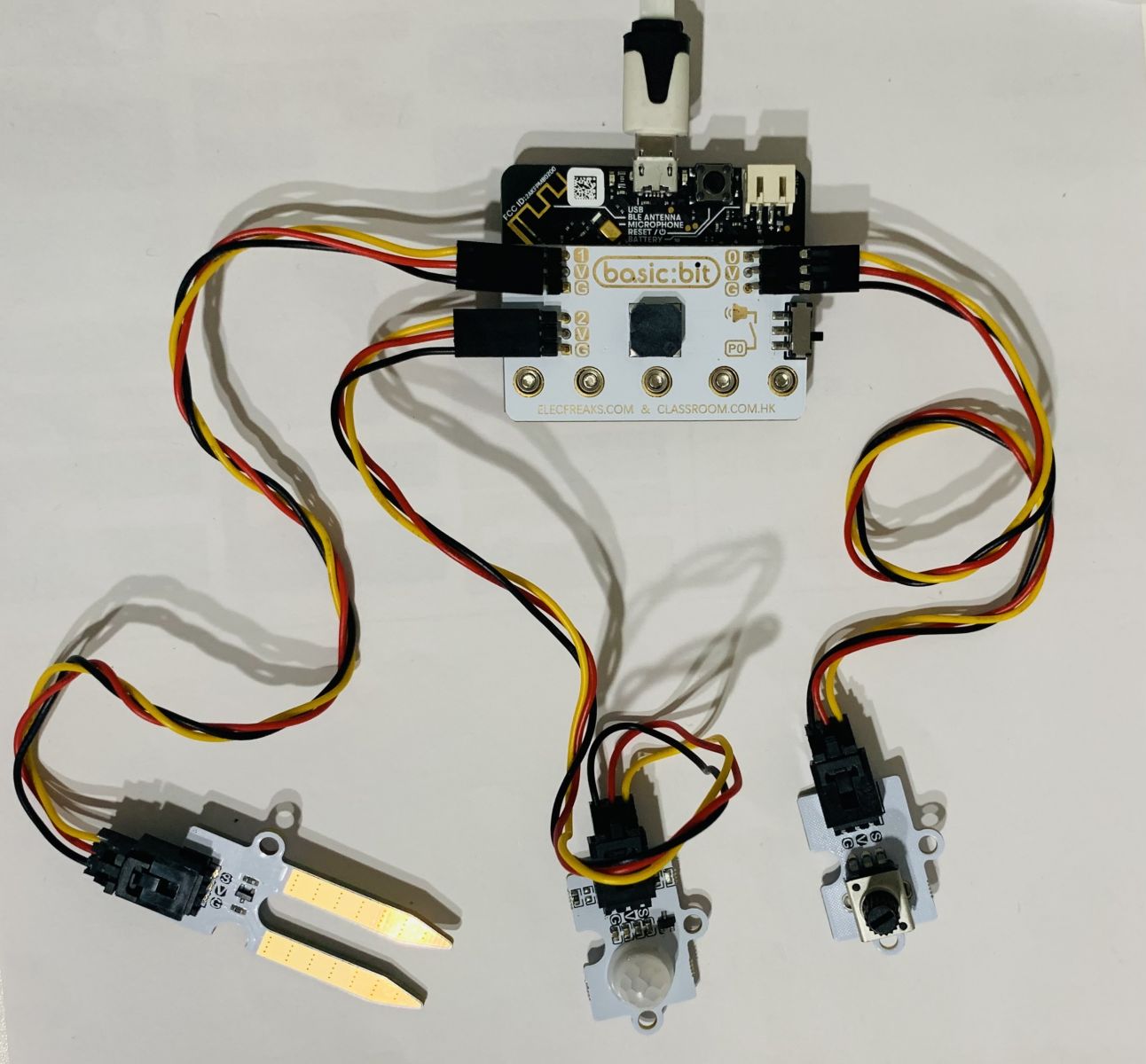
完成圖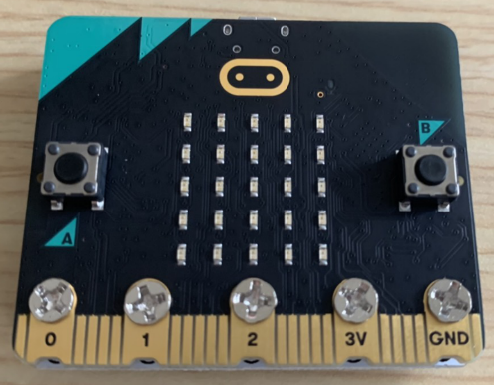 如何將感測器連接上basic:bit?認識GVS:負極(GND)及正極(VCC)提供電子模組電流,另一個接口則是micro:bit的某一個腳位(P0或P1或P2)和電子模組溝通用的訊號接口(Signal),這三個接口的英文縮寫便是 GVS。
如何將感測器連接上basic:bit?認識GVS:負極(GND)及正極(VCC)提供電子模組電流,另一個接口則是micro:bit的某一個腳位(P0或P1或P2)和電子模組溝通用的訊號接口(Signal),這三個接口的英文縮寫便是 GVS。
而basic:bit上的S由Pin的數字替代,例如圖中的P1對照右側的GV1、P2對照右側的GV2、P0對照左側的GV0。
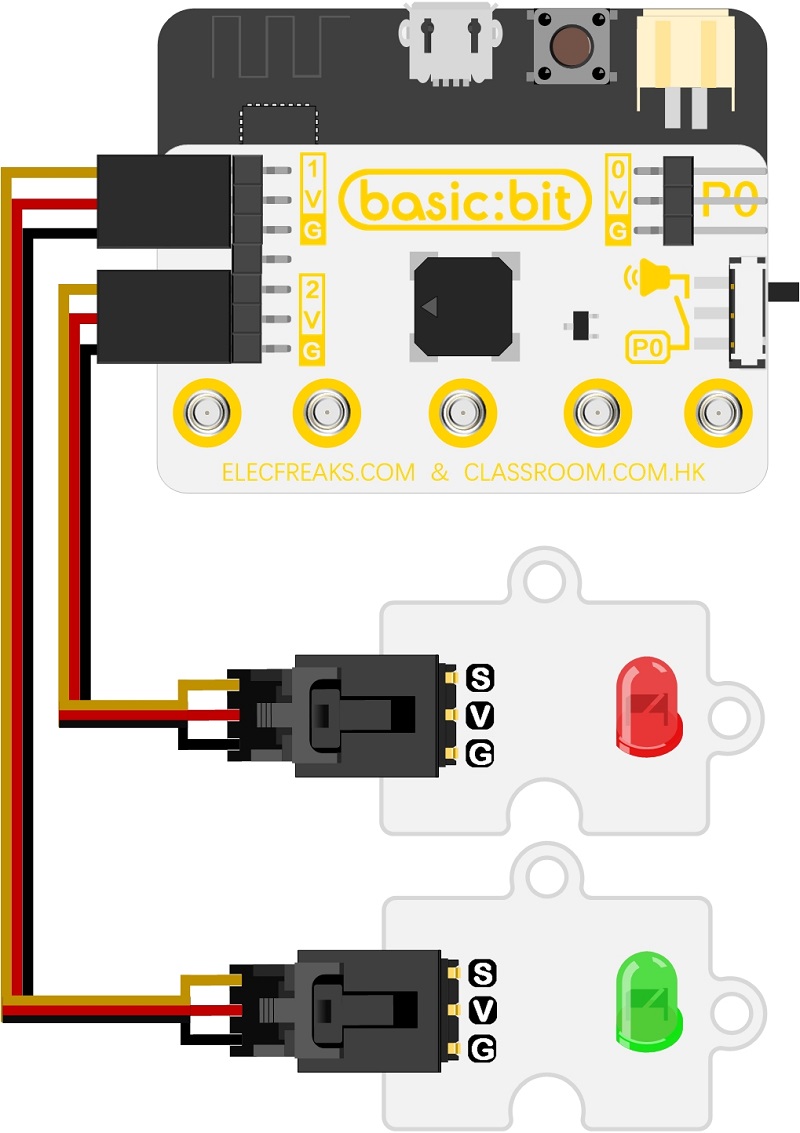
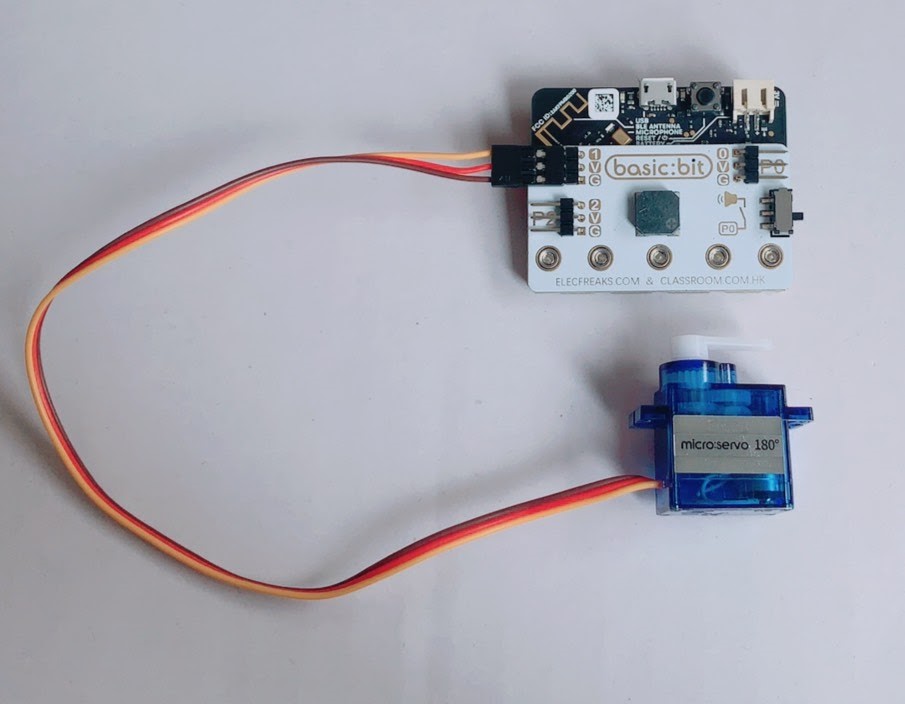
負極(GND)的連接線是黑色,正極(VCC)的連接線是紅色,訊號 (Signal)連接線會用黃色。請以此特性來為感測器接上basic:bit。參數
- 電壓:3.3V(由micro:bit供電)
- IO埠:3
- 尺寸:51.7毫米x 29.1毫米
內含組件- 1 x basic:bit
- 7 x 螺絲(只需5個)
應用01 LED
材料 






.png)

.png)





