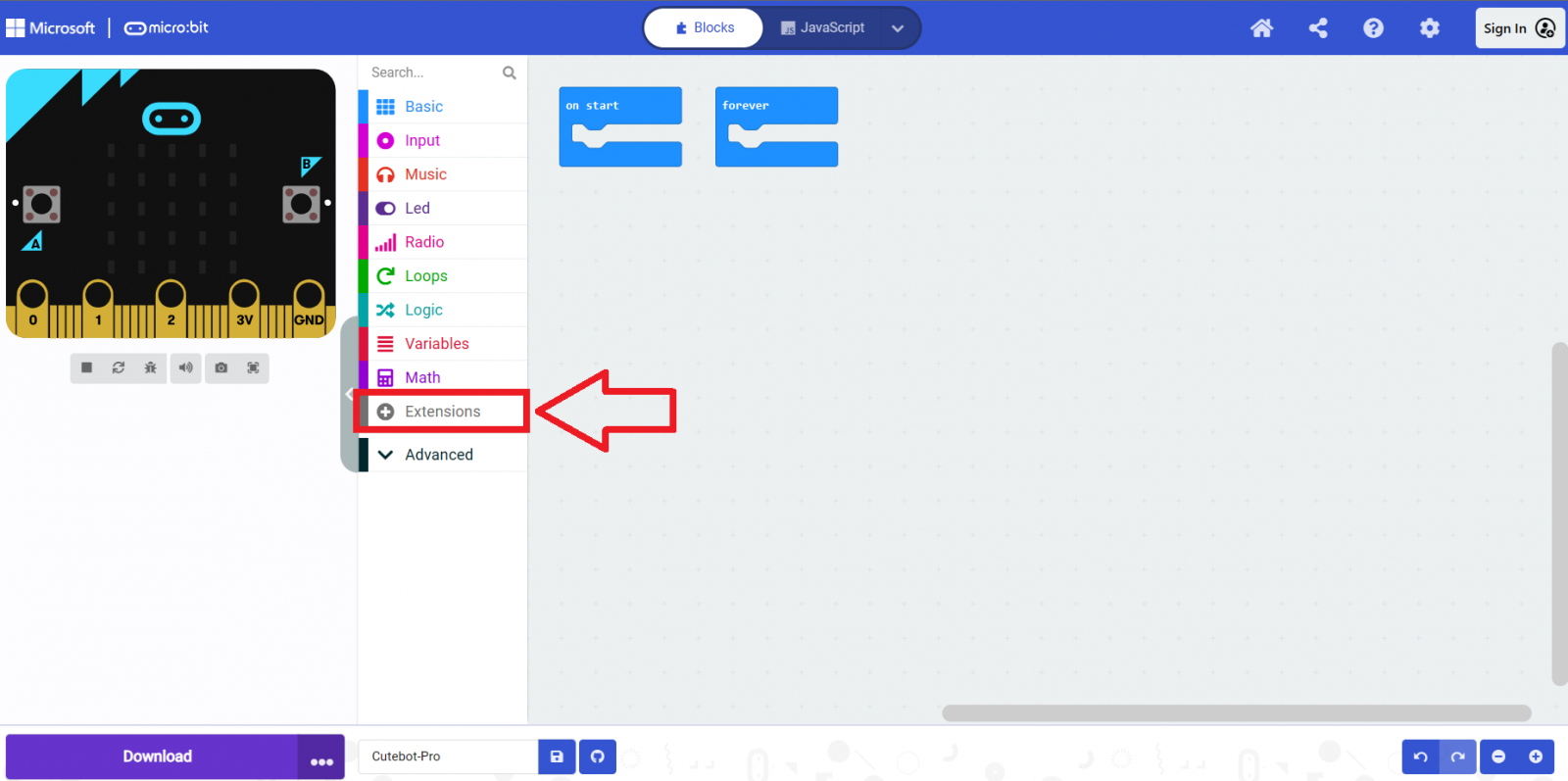
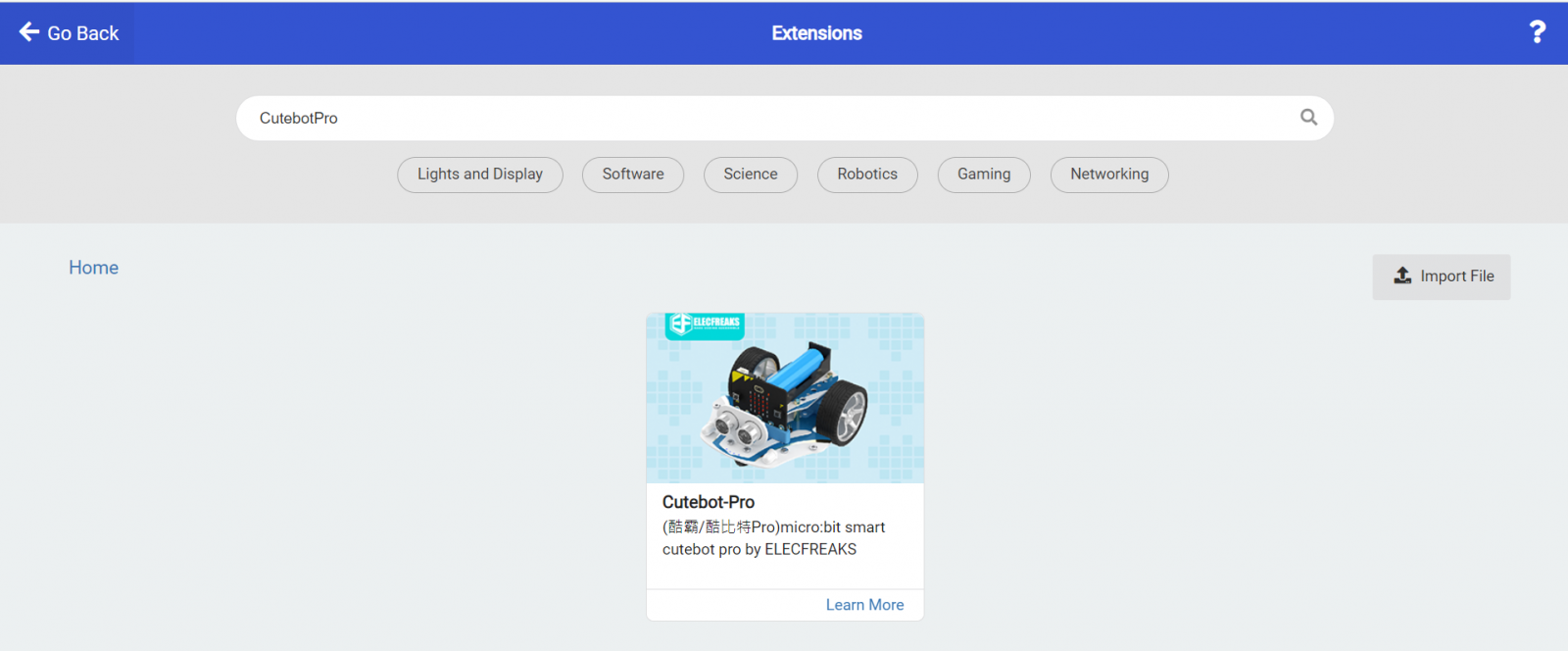
| 目錄: 第一章 認識 智慧小車 Cutebot Pro (一) 電源指示燈 (二) 規格參數 (三) Cutebot Pro 小車功能介紹 第二章 安裝 智慧小車 Cutebot Pro (一) 安裝電池 (二) 安裝超音波感測器 第三章 設定-四個循跡感測器之學習模式 第四章 進入編程平台 第五章 示範專案 (一) 向前行駛 (二) 定距行駛 (三) 走正方形的軌跡 (四) 聲音控制向前行駛 (五) 彩虹車燈 (六) 自動開燈 (七) 小車依照指定數值&設定來行駛 (八) 智能避障車 (九) 定距跟車 (十) 自動巡線 (十一) PID路線巡檢 (十二) 體感遙控小車 (十三) 使用紅外線感測器操控小車 (十四) joystick 操控小車 |
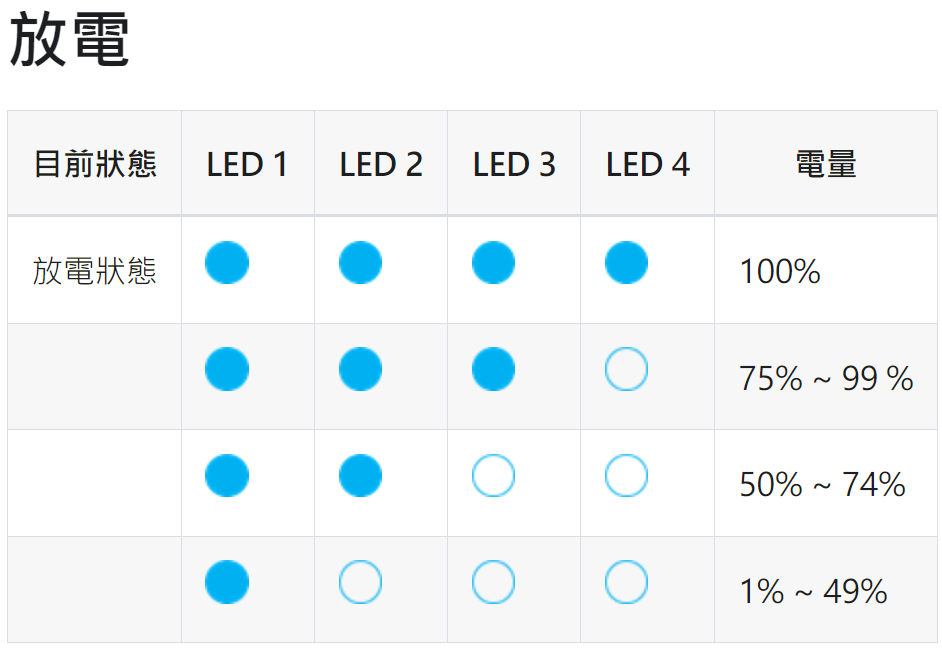
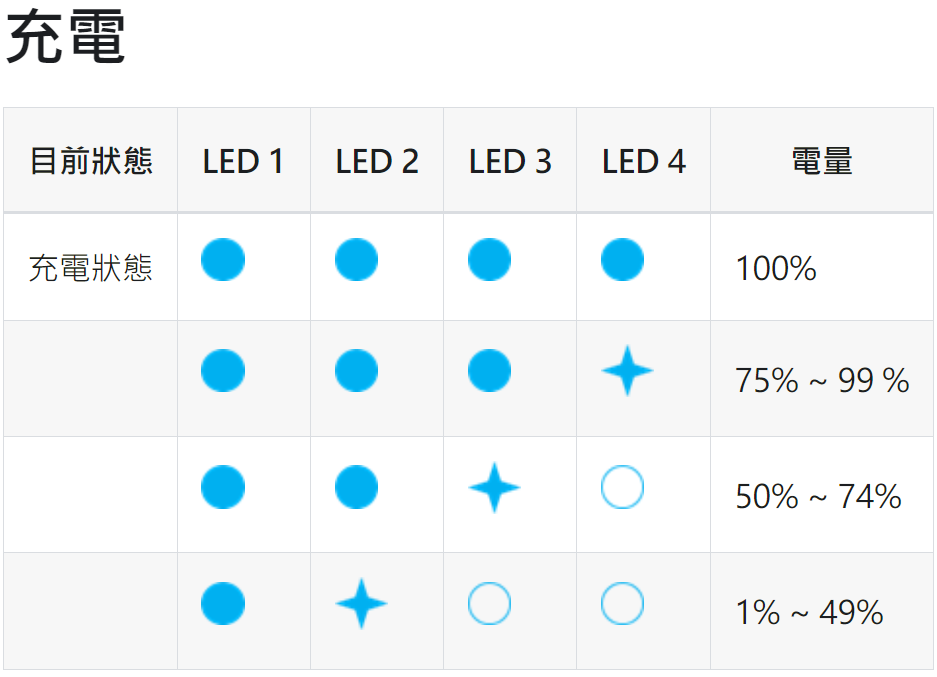
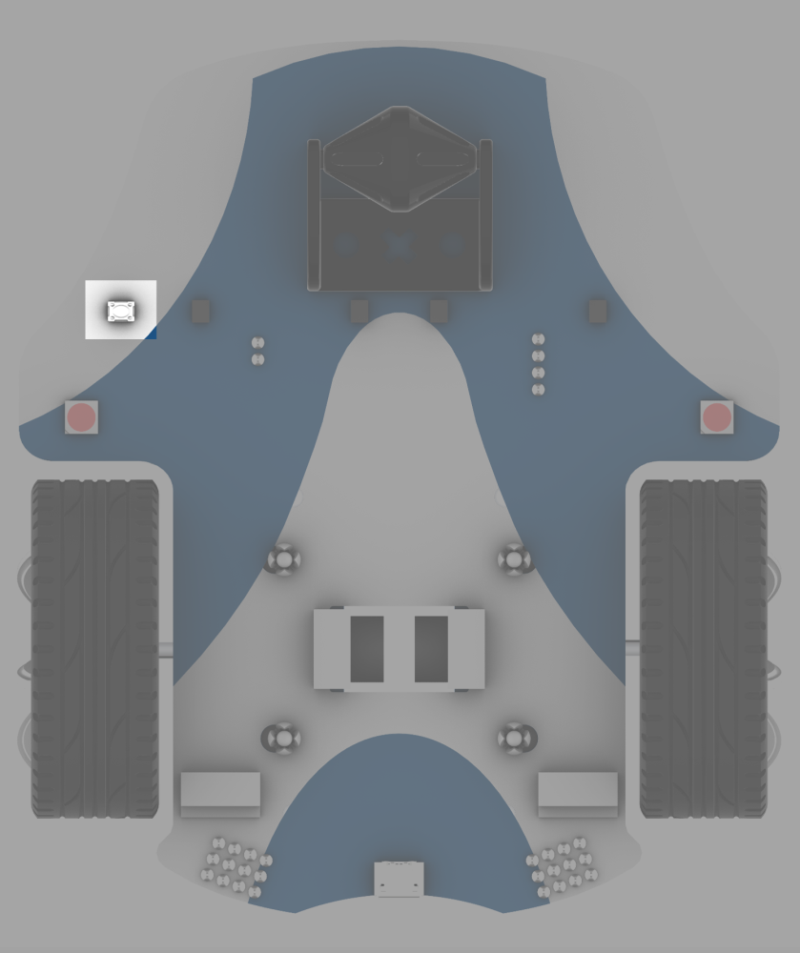
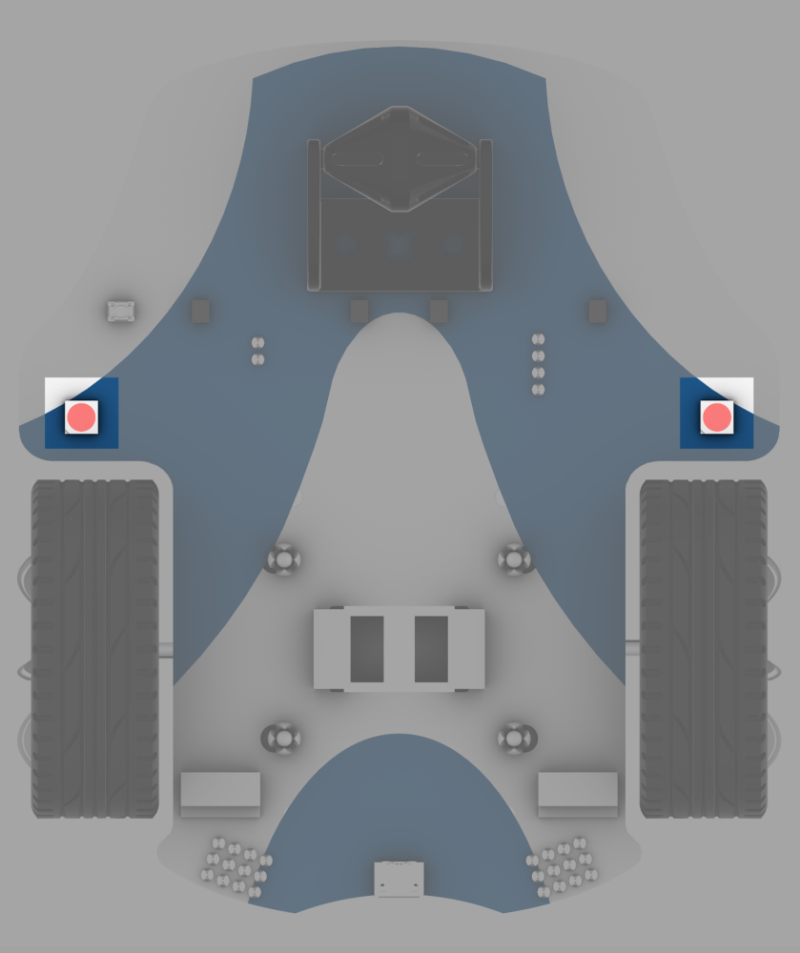
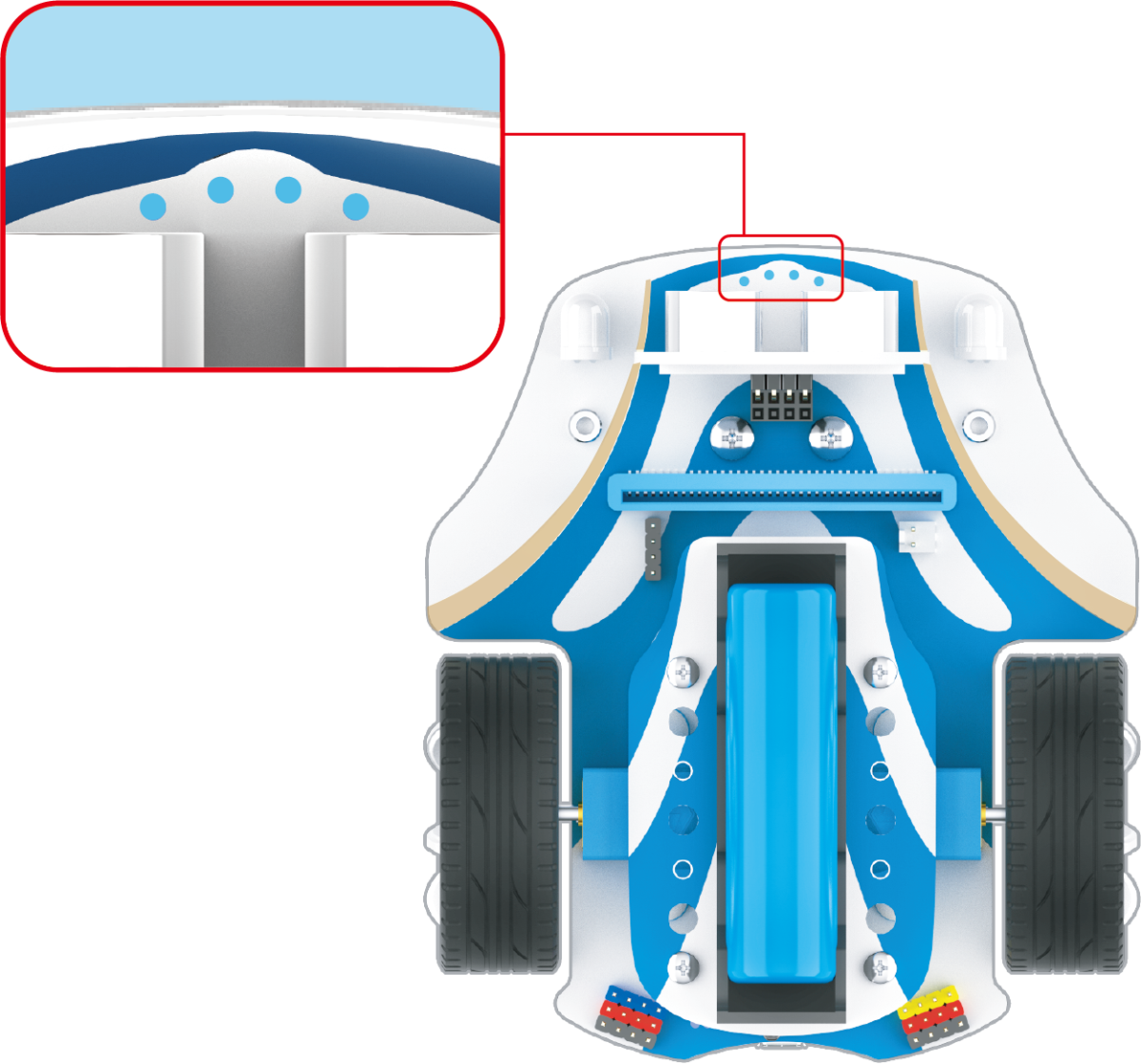
 | LED燈 常亮 |
 | LED燈 熄滅 |
 | LED燈 閃爍 |
| 專案 | 參數 |
| 產品名稱 | Smart Cutebot Pro |
| 供電方式 | 18650鋰電池 |
| 充電電流 | 1000mA |
| 充電時間 | 約120min |
| 續航時間 | 約120min |
| 最大工作電壓 | 4.2V |
| 額定工作電壓 | 3.7V |
| 最小工作電壓 | 3.3V |
| 馬達介面輸出電壓 | 3.3V |
| 馬達介面最大輸出電流 | 0.2A |
| 伺服馬達介面輸出電壓 | 當前電池電壓 |
| 伺服馬達介面最大輸出電流 | 3A |
| IO介面輸出電壓 | 3.3V |
| IO介面最大輸出電流 | 3A |
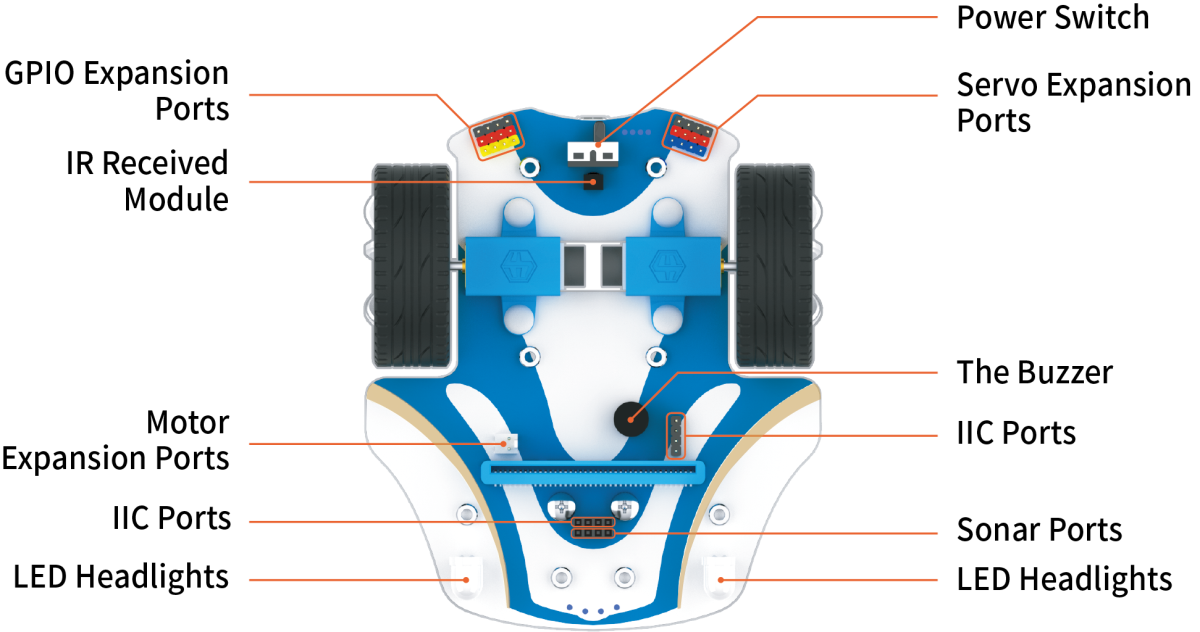
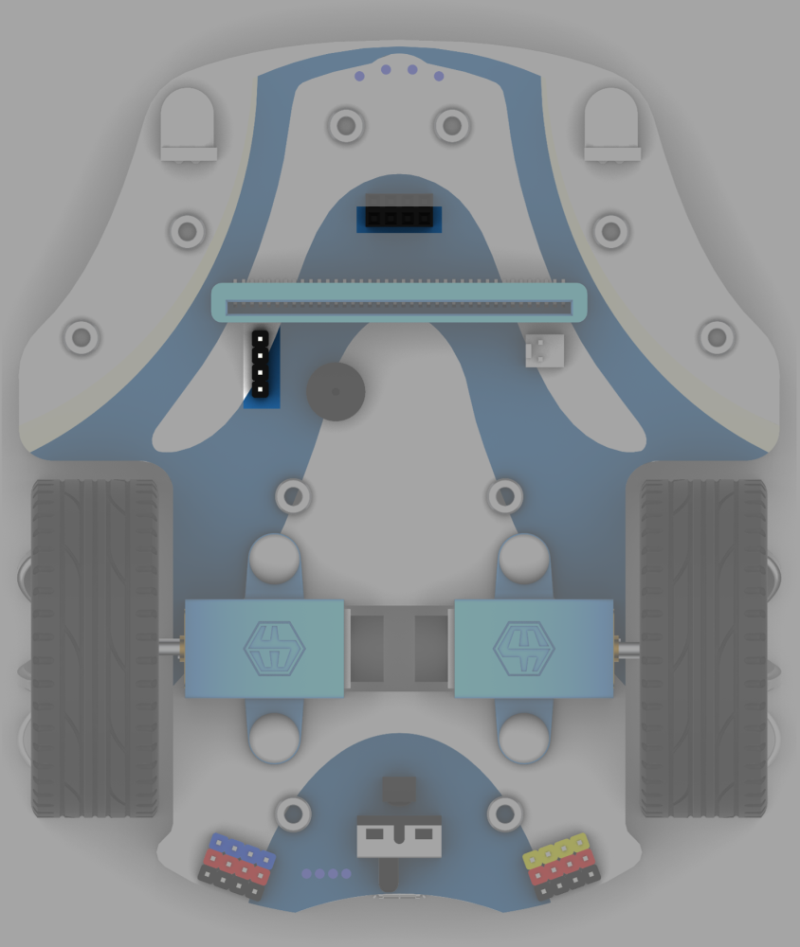
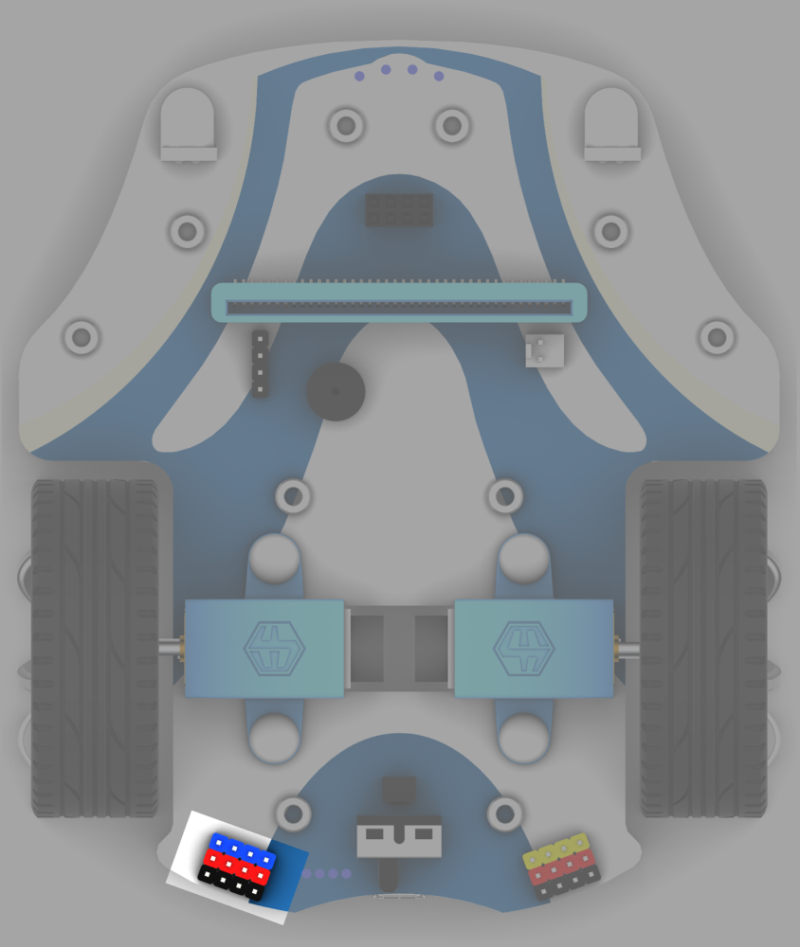
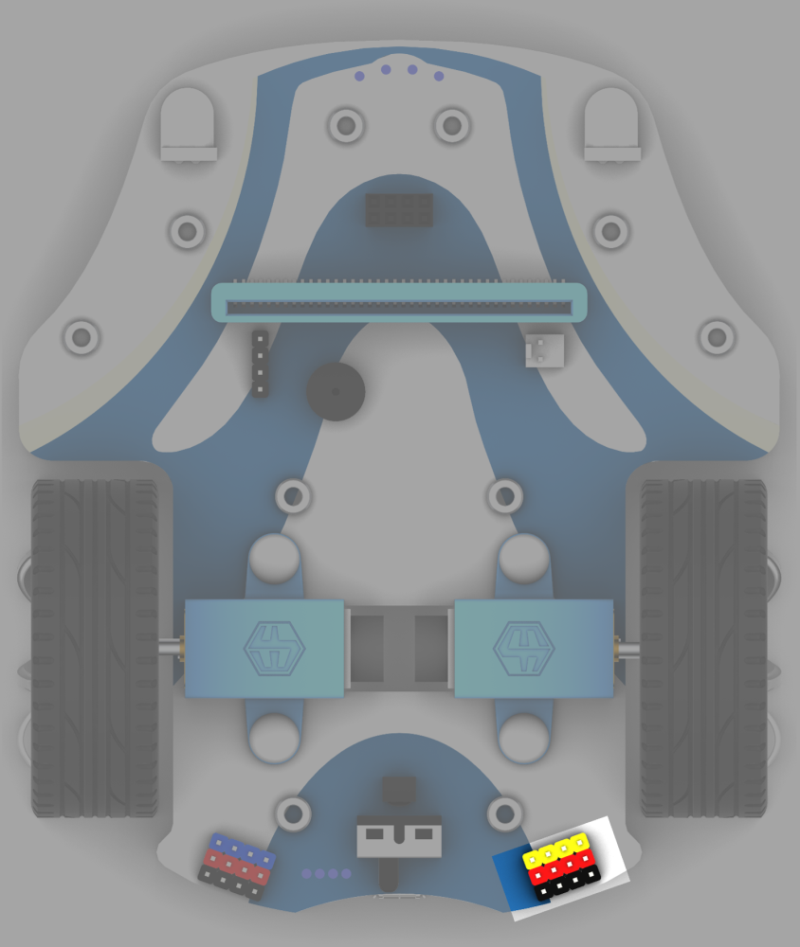
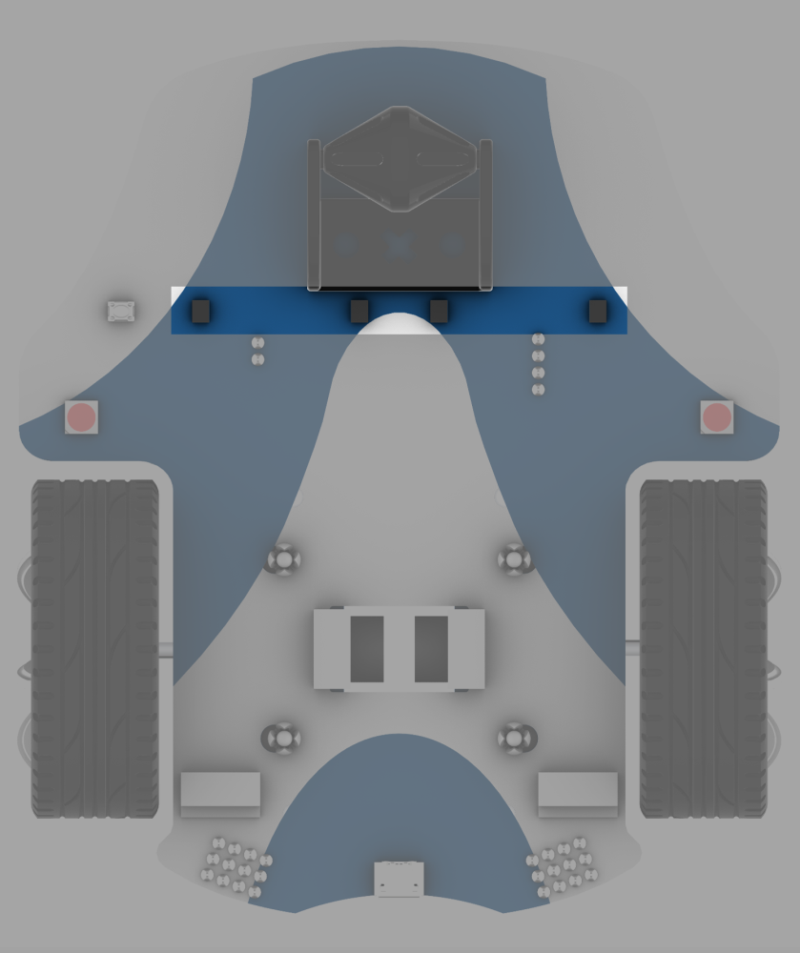
| 車板裝置 | 2 X 車底彩虹燈 2 X 車頭燈 1 X 蜂鳴器 1 X 紅外線接收器 4 X 紅外線循跡感測器 |
| 伺服馬達介面 | 4個 |
| 擴充馬達介面 | 1個 |
| GPIO擴充介面 | 4個 |
| IIC介面 | 2個 |



| 分類 | 積木命令 | 功能說明 |
| Basic 基礎設定 |  | 使用此積木塊,小車全速前進 |
 | 使用此積木塊,小車全速倒退 | |
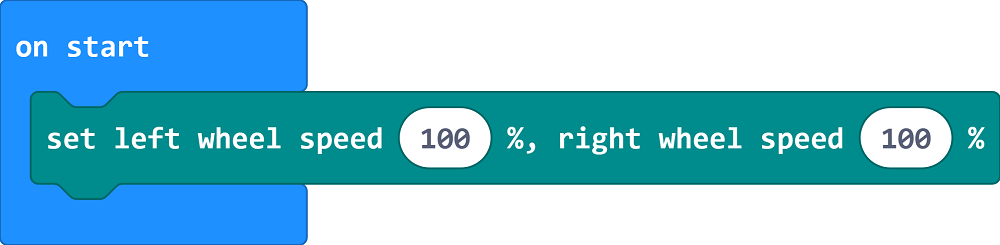
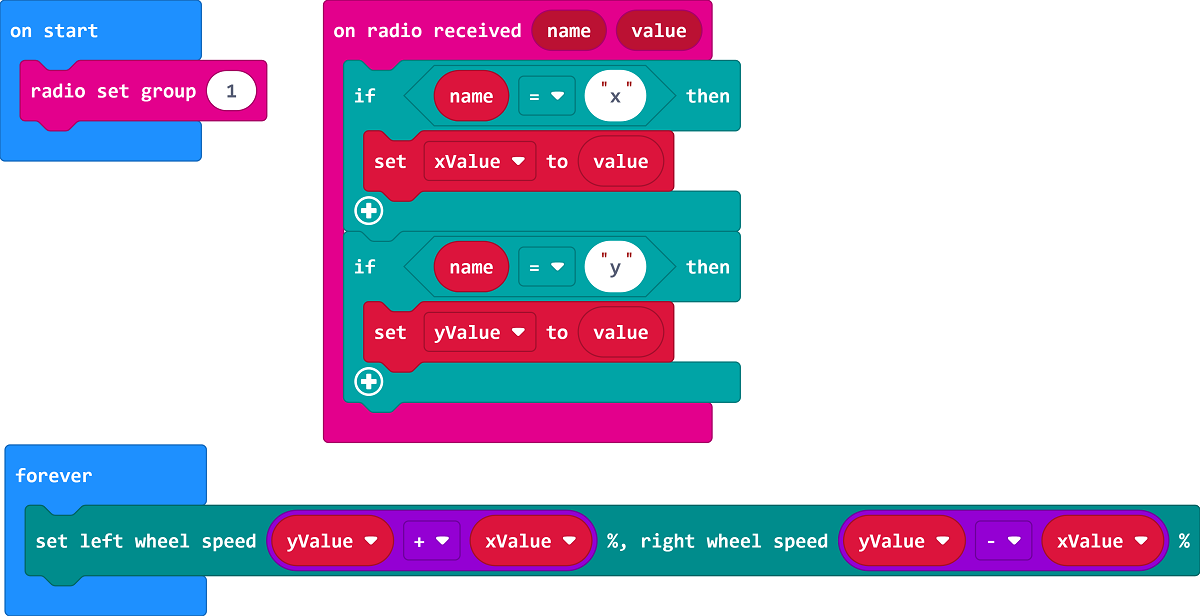
 | 使用此積木塊,分別設定左輪和右輪的速度,速度範圍為-100~100 | |
 | 使用此積木塊,設定左輪或右輪或全部車輪停止轉動 | |
 | 使用此積木塊,取得左側車輪或右側車輪的轉動速度(cm/s) | |
 | 使用此積木塊,取得左側車輪或右側車輪的轉動角度 | |
 | 使用此積木塊,清除已取得的左側車輪或右側車輪的轉動角度 | |
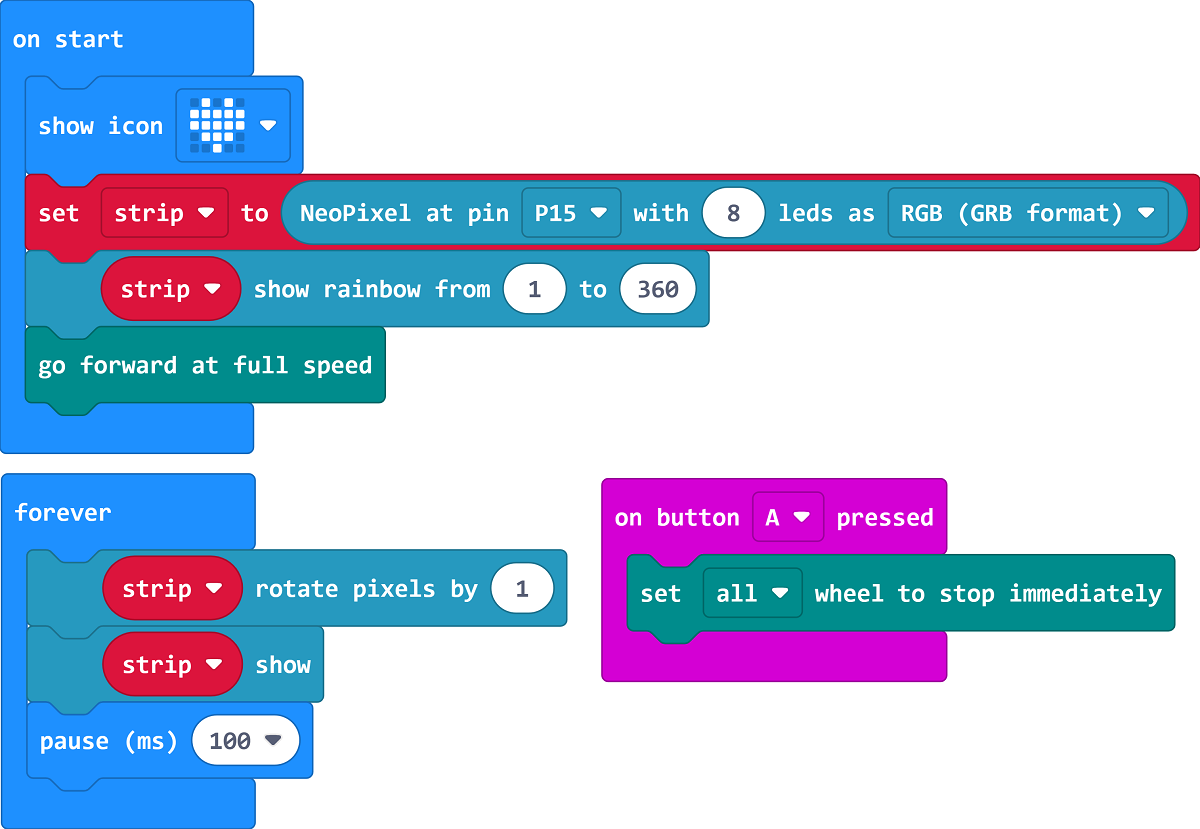
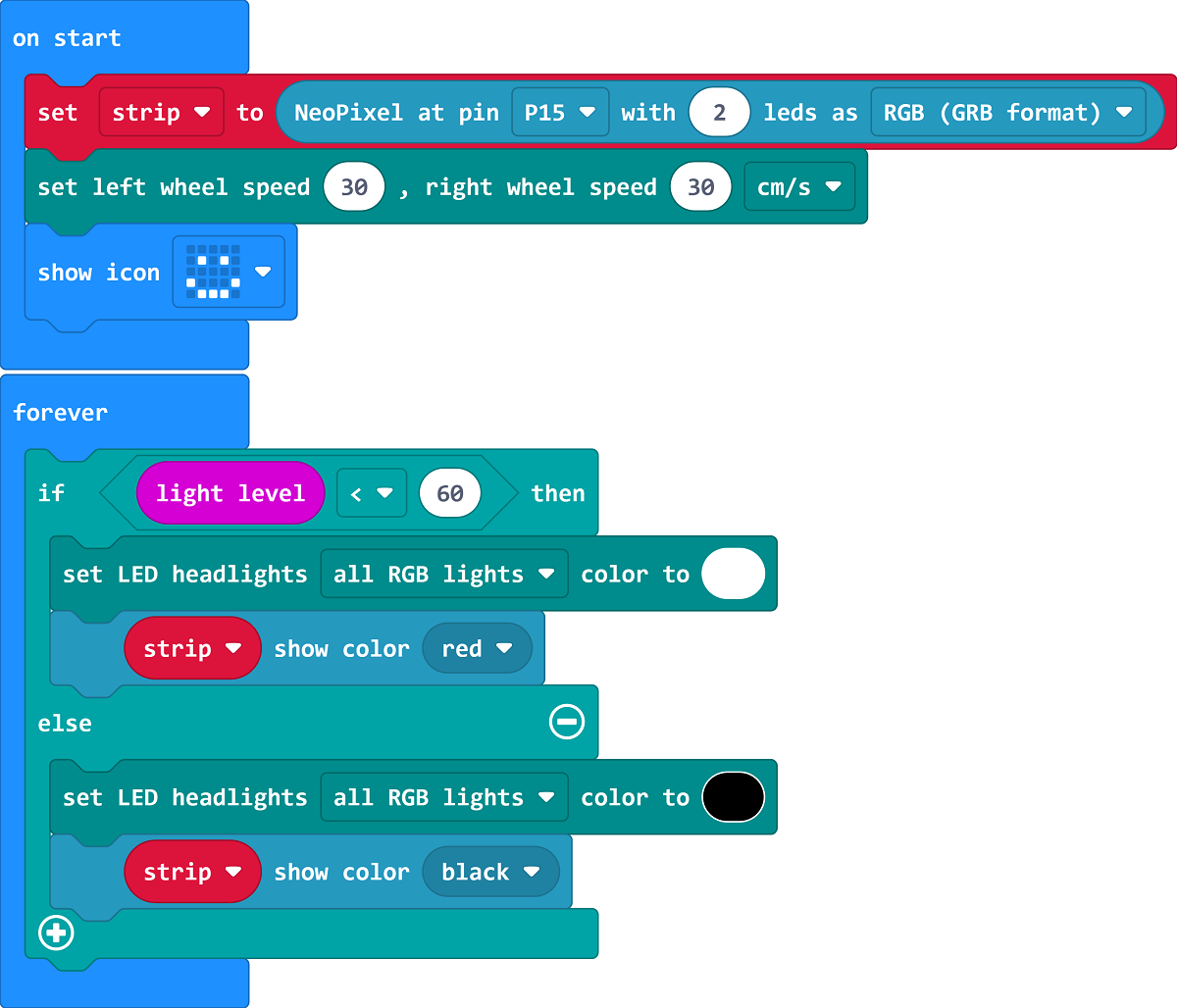
| Headlights 車燈設定 |  | 使用此積木塊,設定左右RGB車燈顯示的顏色為預設顏色 |
 | 使用此積木塊,設定左右RGB車燈顯示的顏色 | |
 | 使用此積木塊,關閉所有車頭燈 | |
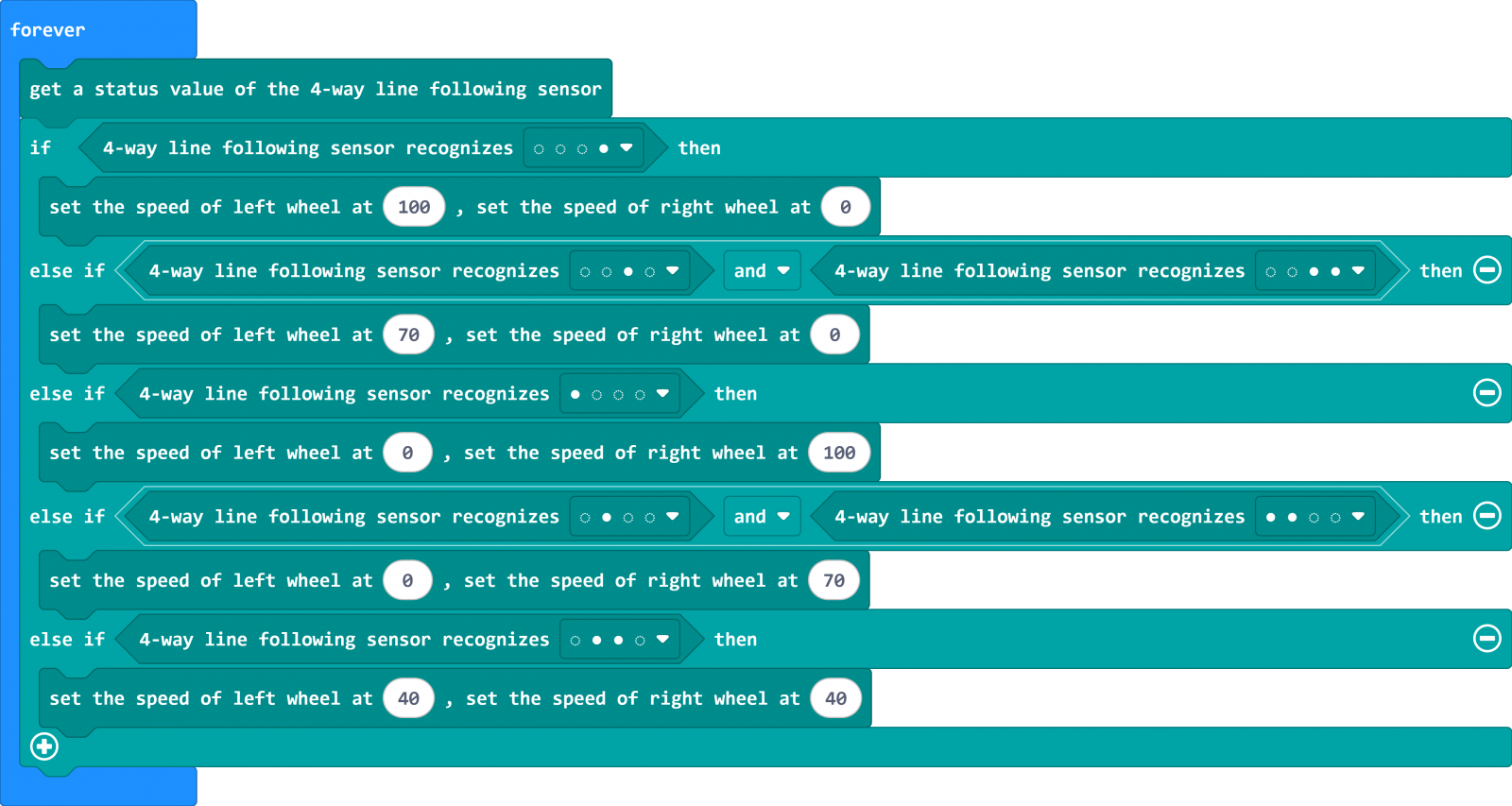
| Four-Way 循跡感測器設定 |  | 使用此積木塊,取得目前四路巡線感測器的狀態值 |
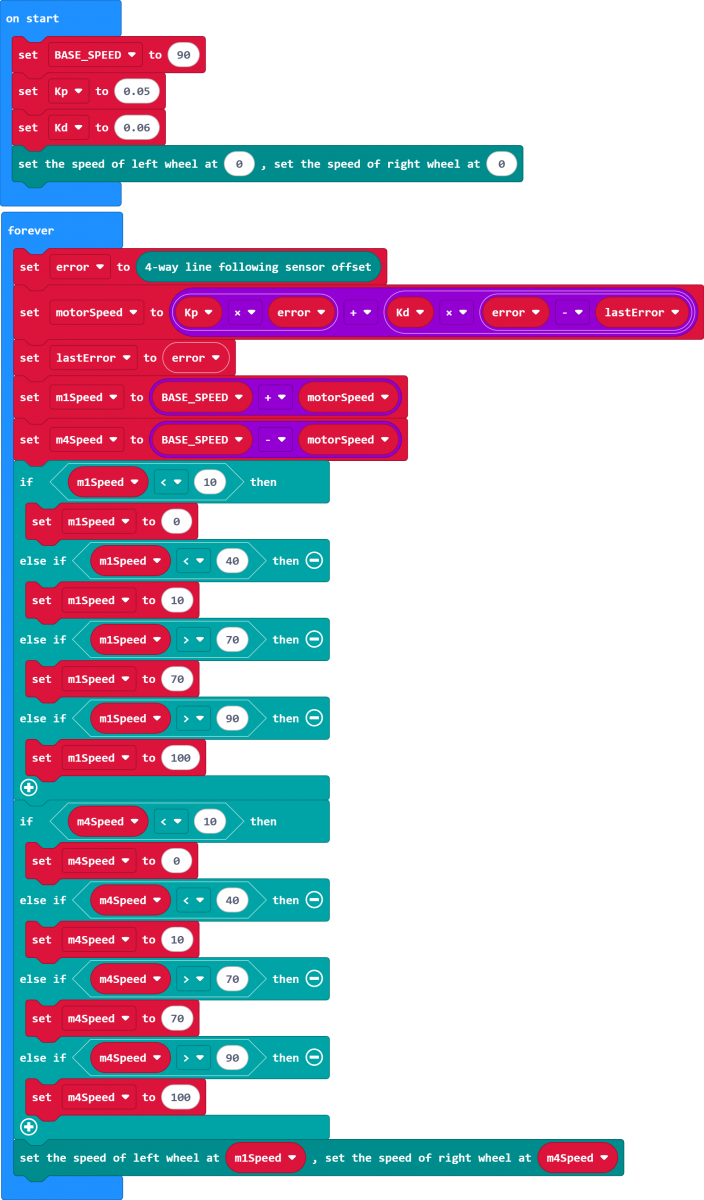
 | 使用此積木塊,取得巡線感測器偏移量 | |
 | 使用此積木塊,單獨取得循跡感測器某一通道的狀態 | |
 | 使用此積木塊,單獨取得循跡感測器某一通道的灰階值 | |
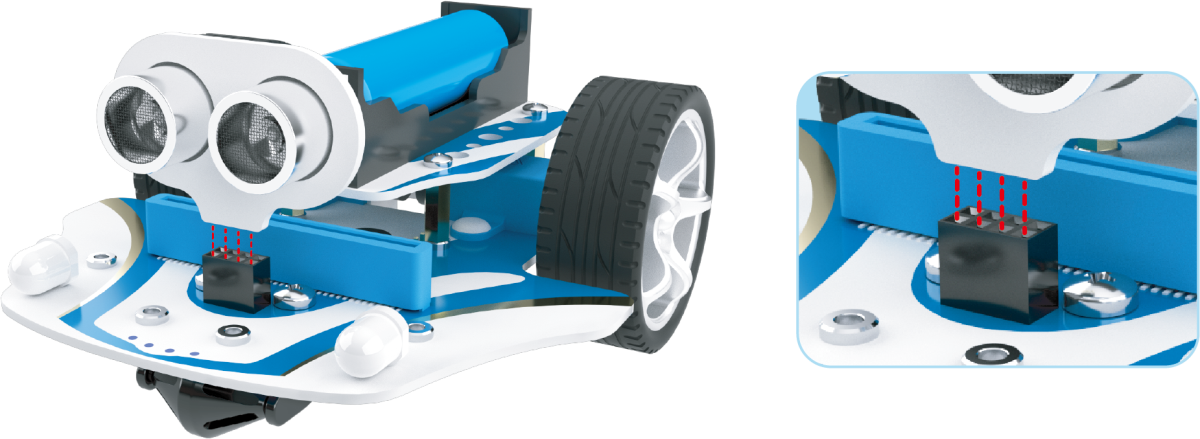
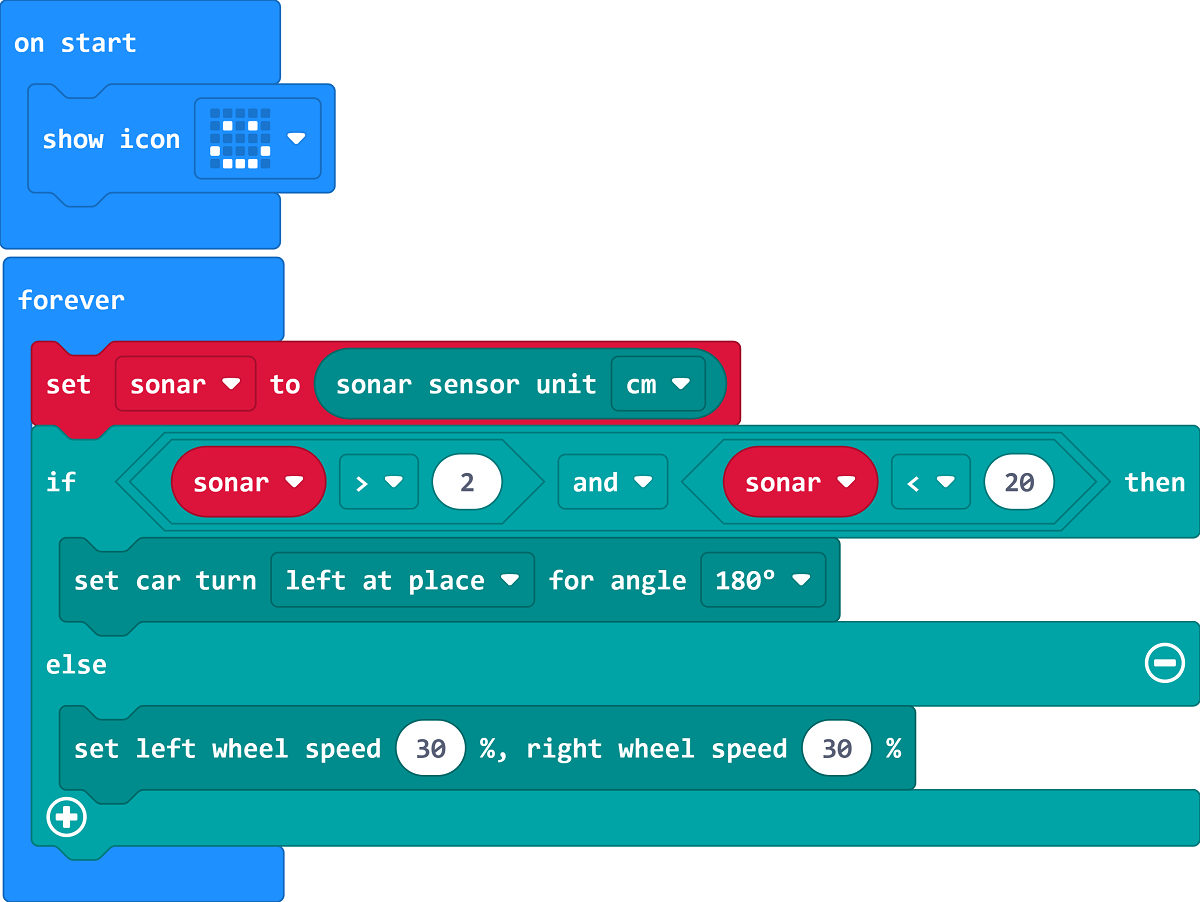
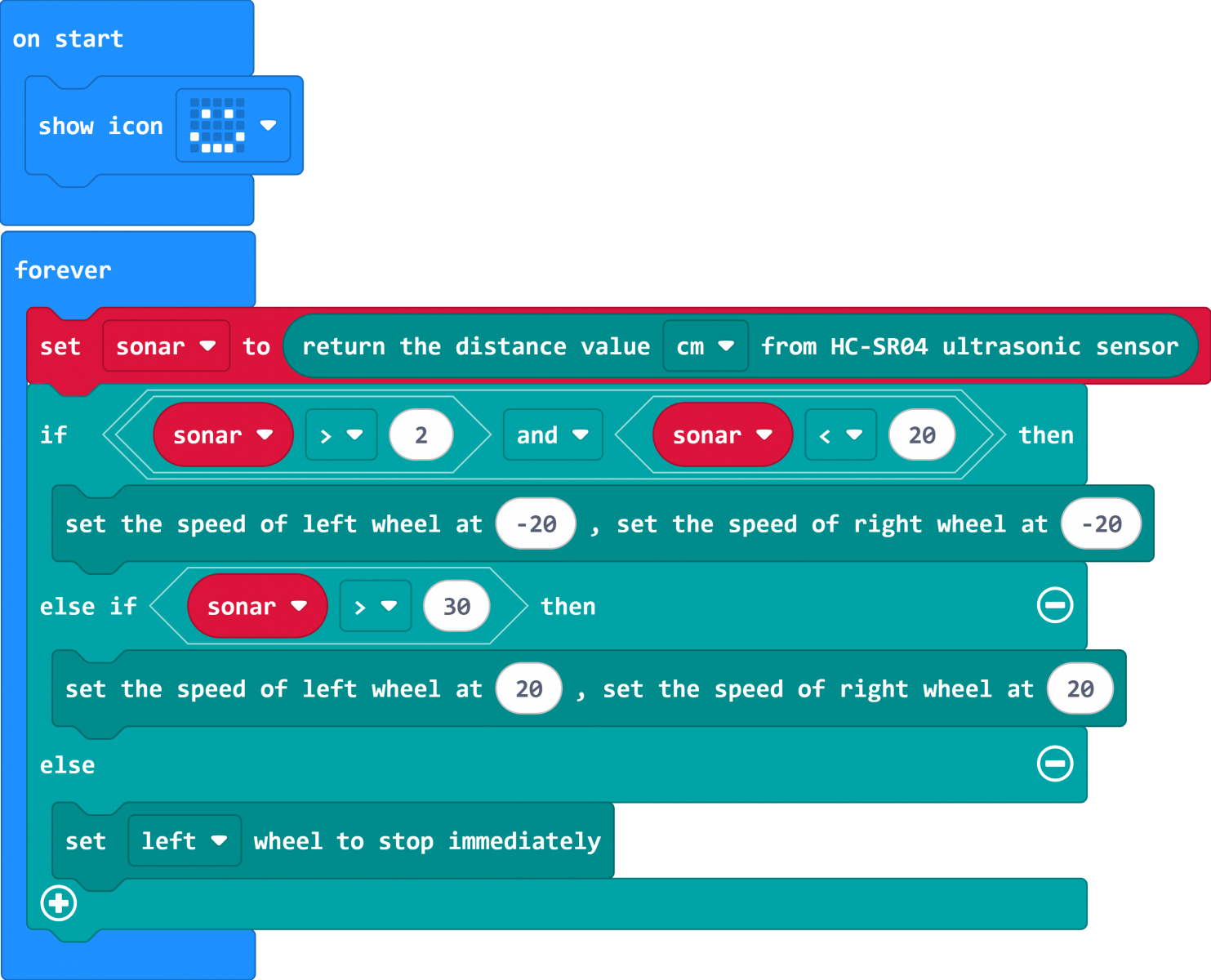
| HC-SR04 |  | 取得超音波感測器的返回值 |
| PID Contrl PID控制設定 |  | 設定車輪速度(速度範圍為20~50 cm/s) |
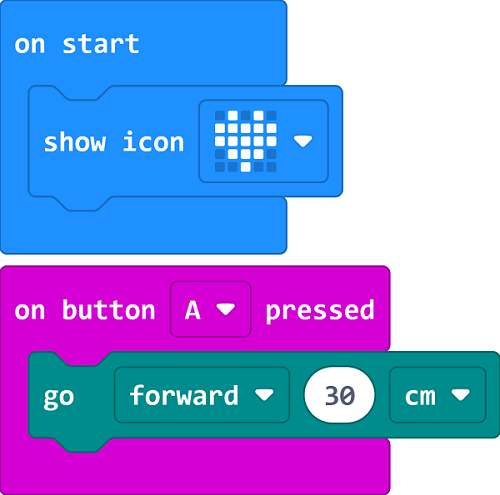
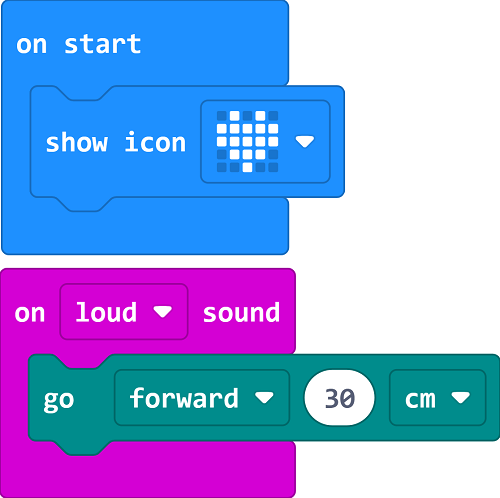
 | 設定小車前進或後退指定距離(單位:公分、英吋、車輪轉動角度) | |
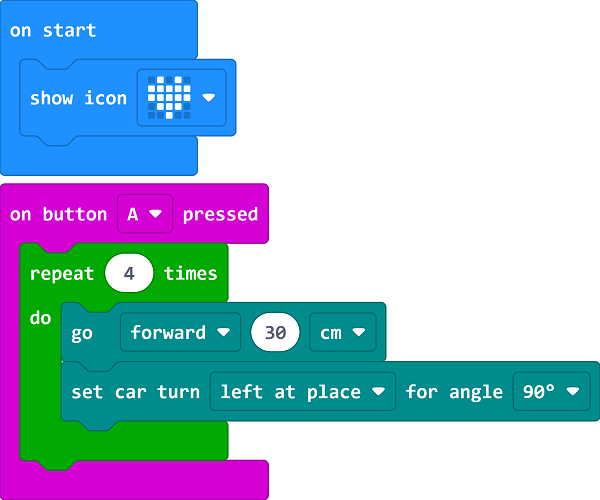
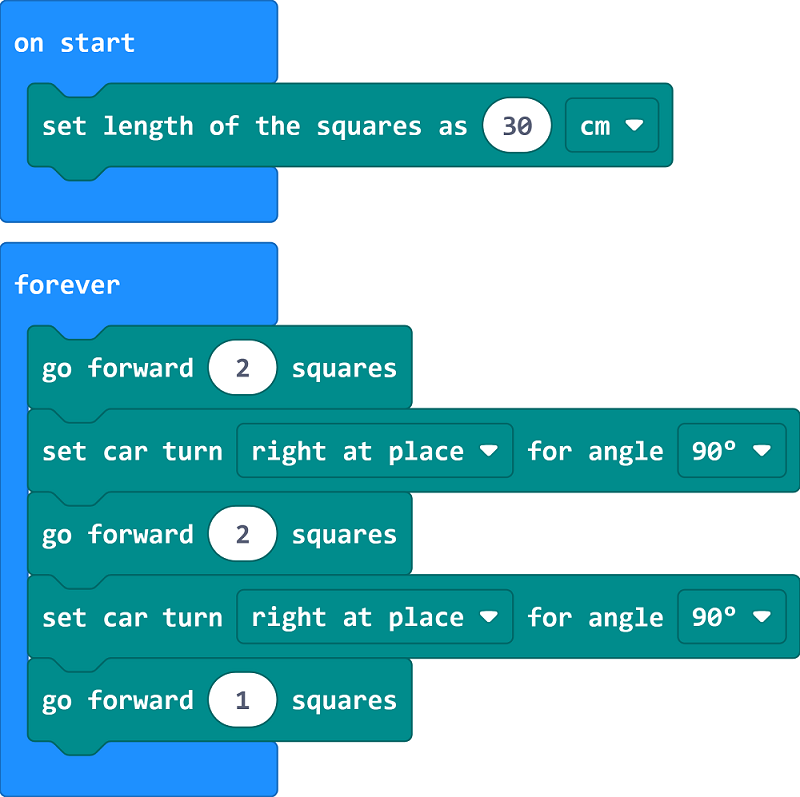
 | 設定小車的轉向方式與轉向角度 | |
 | 設定方塊邊長(單位:公分、英吋) | |
 | 設定小車向前行駛N個方塊 | |
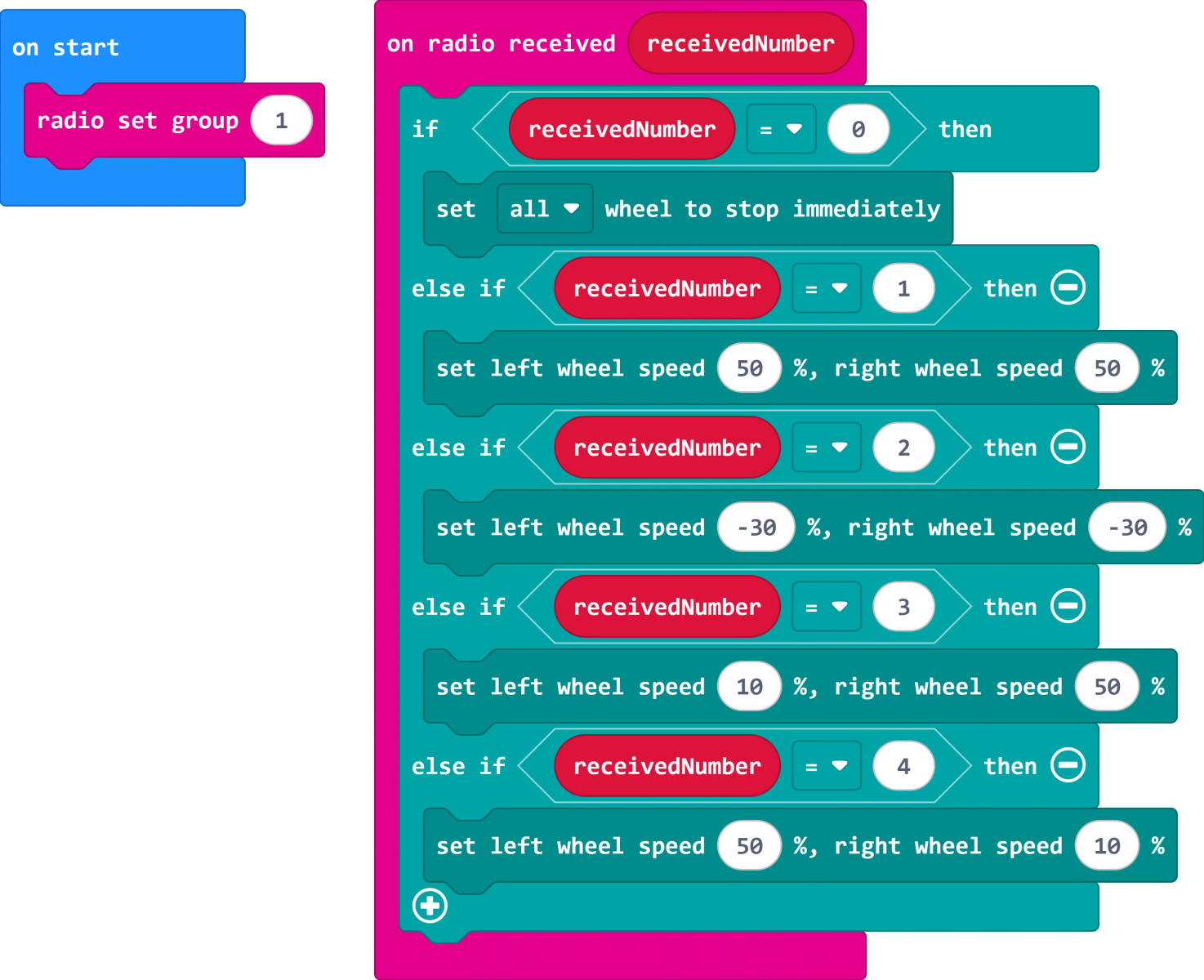
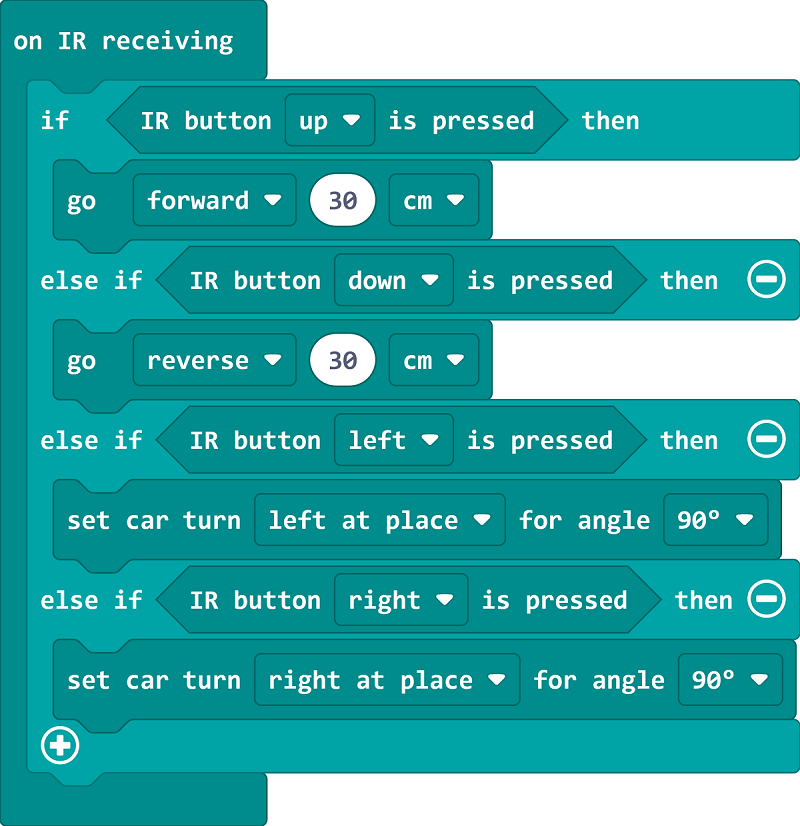
| IRservo 紅外線遙控器設定 |  | 當接收到紅外線訊號時,執行內部程序 |
 | 識別紅外線遙控器的按鈕是否被按下 | |
| Extendinterface 擴充馬達設定 |  | 設定擴展馬達的速度(-100~100) |
 | 設定擴展馬達停止轉動 | |
 | 設定使用馬達的最大轉動角度以及接入連接埠和轉動角度 | |
 | 設定連續旋轉馬達的接入埠及速度 | |
| other |  | 取得目前小車的韌體版本號 |

 |  |  |  |  |