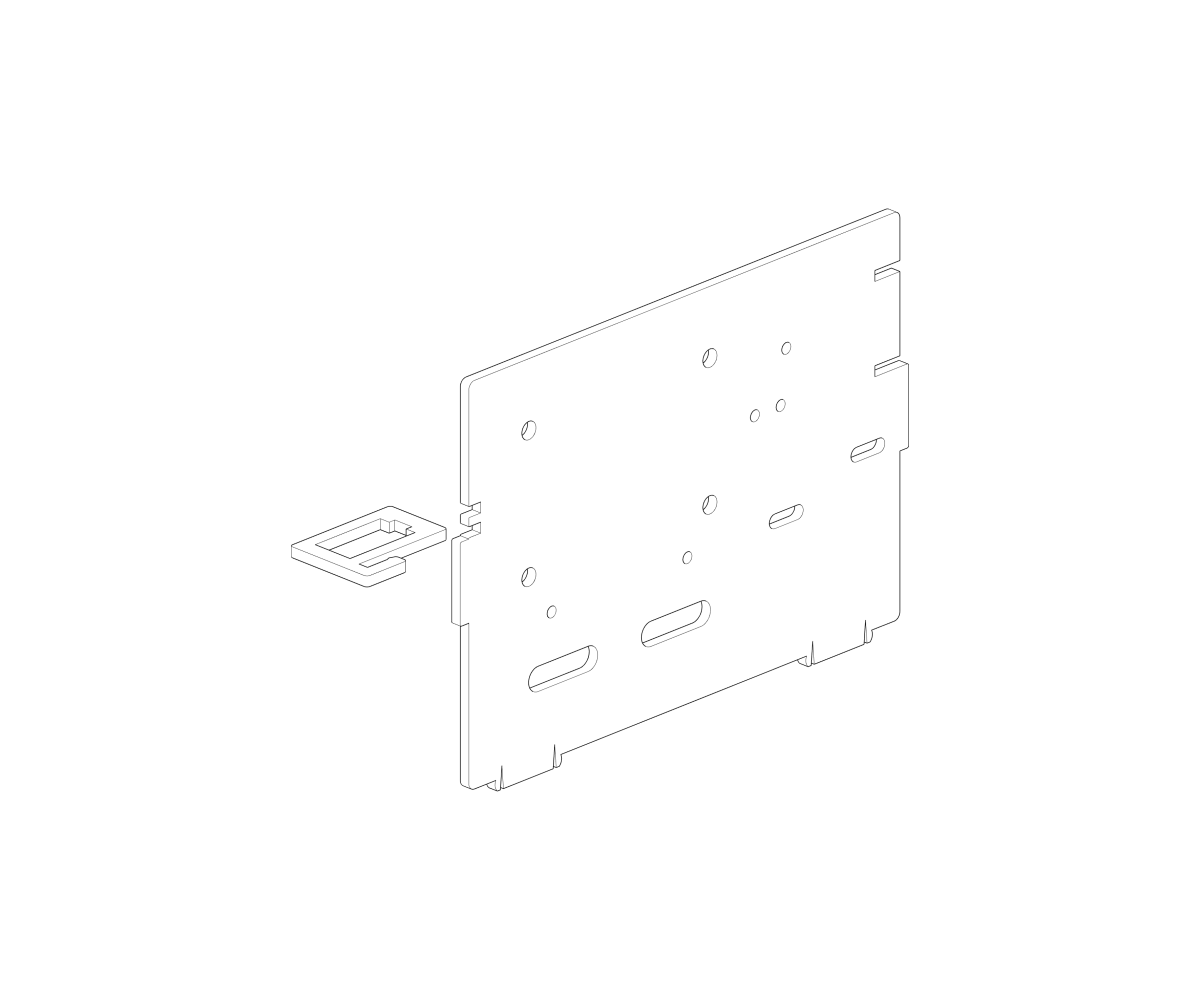
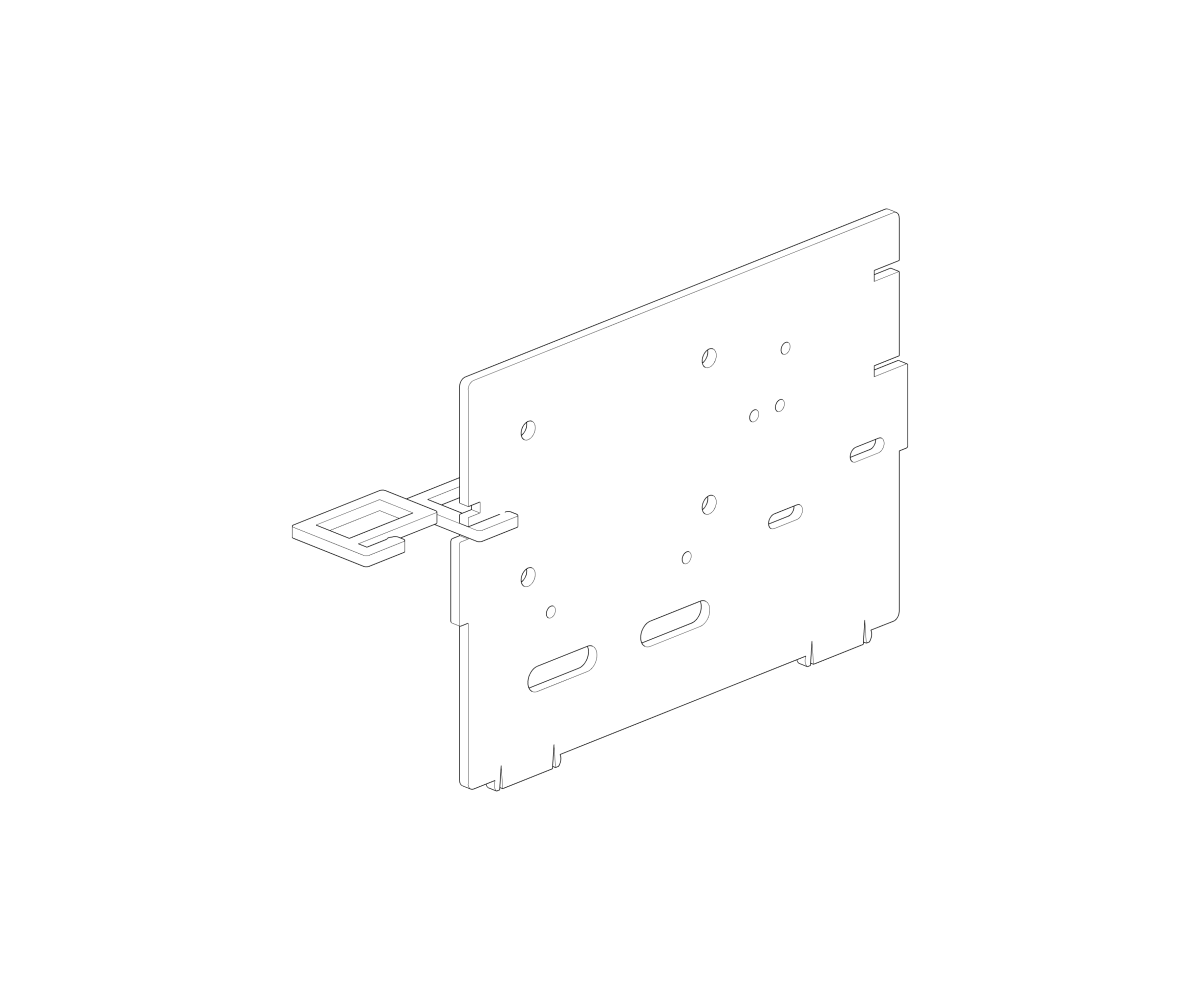
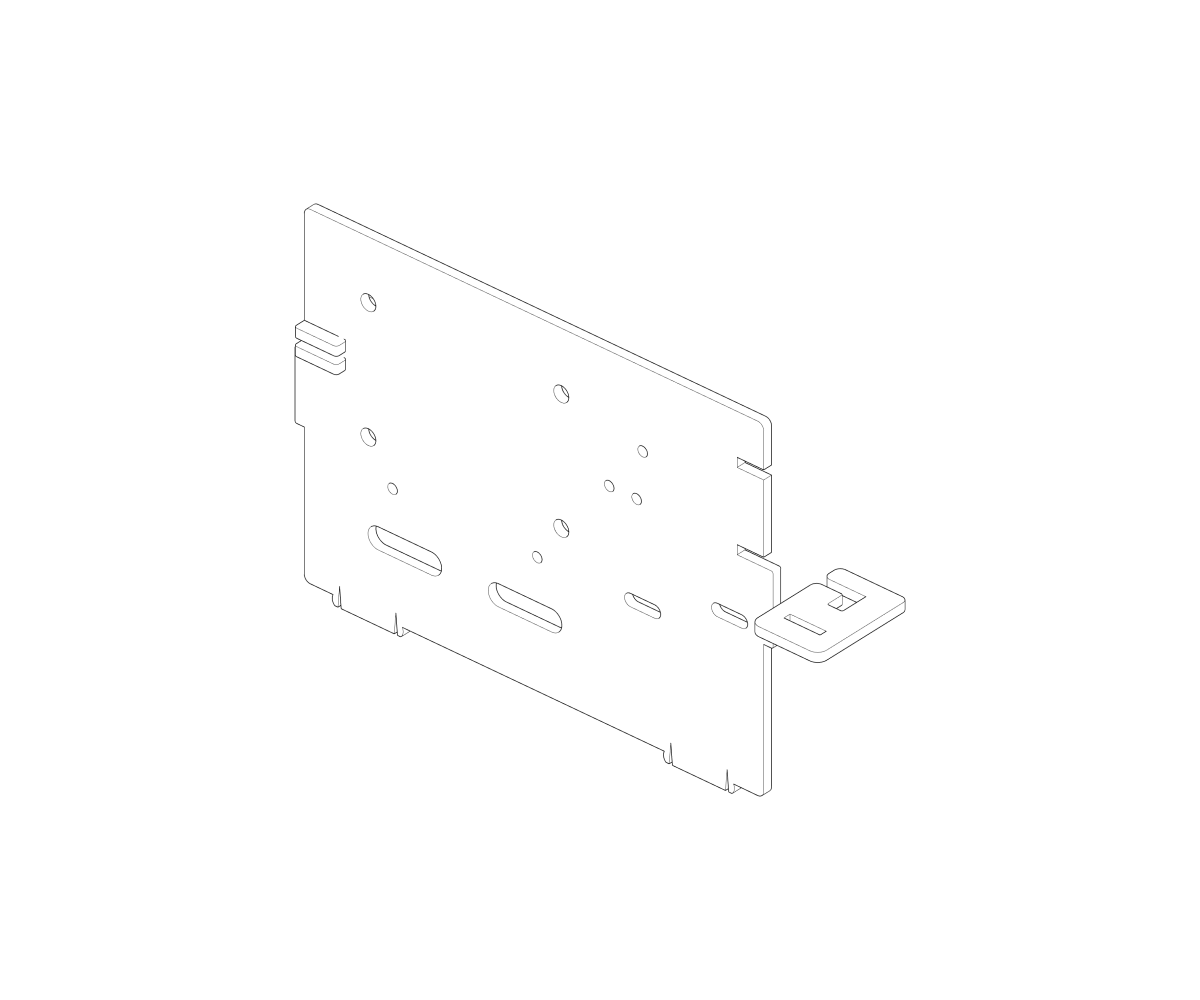
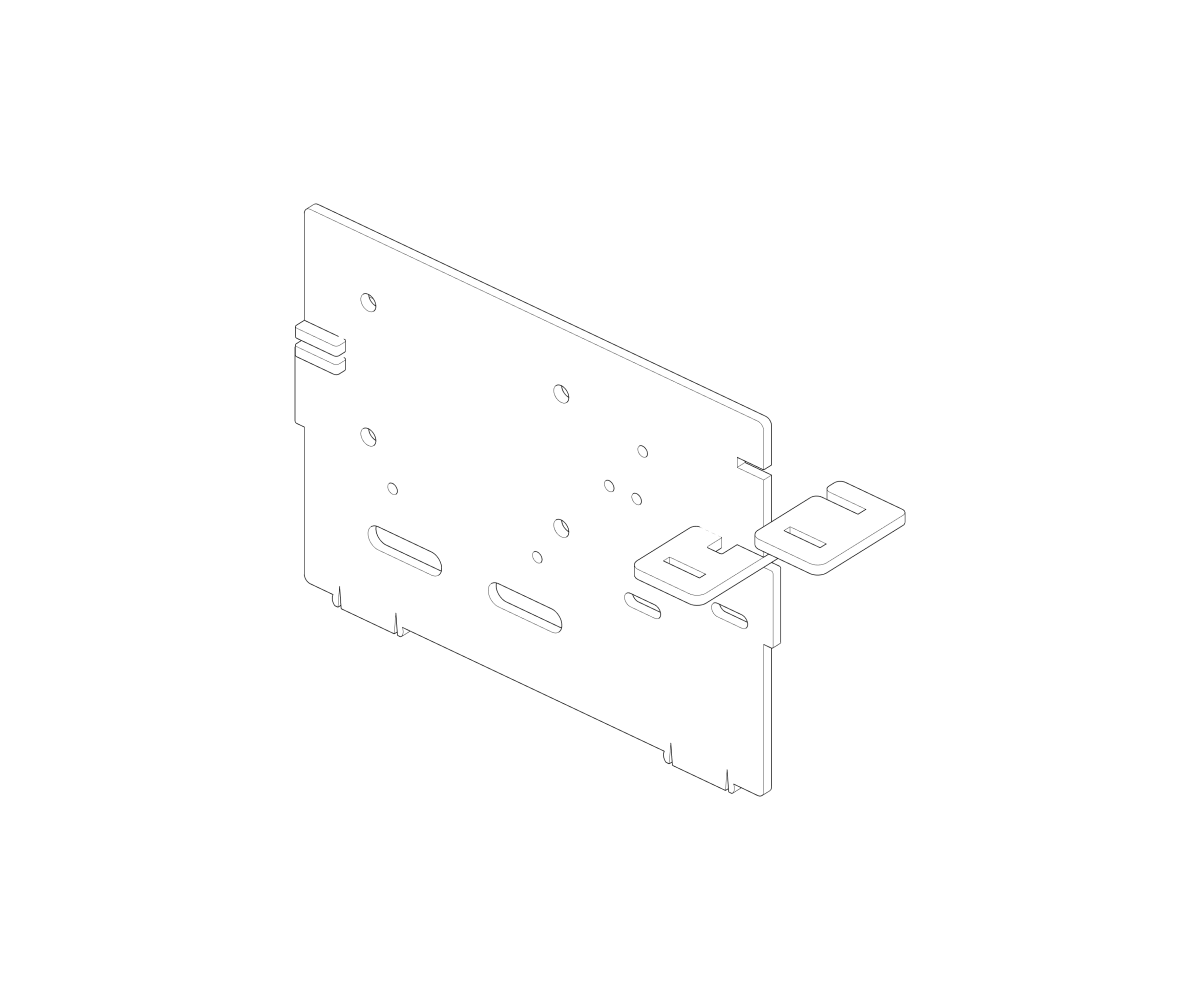
| Pre-positioned Holes 內建孔位 | QTY 數量 |
|---|---|
| IOT:bit 擴充版孔位 | 1 |
| Sensor:bit | 1 |
| Holes for mini sensors(Such as Light sensor) 迷你感測器孔位 | 4 |
| Holes for larger sensors(Such as Motor fan module) 大型感測器孔位 | 1 |
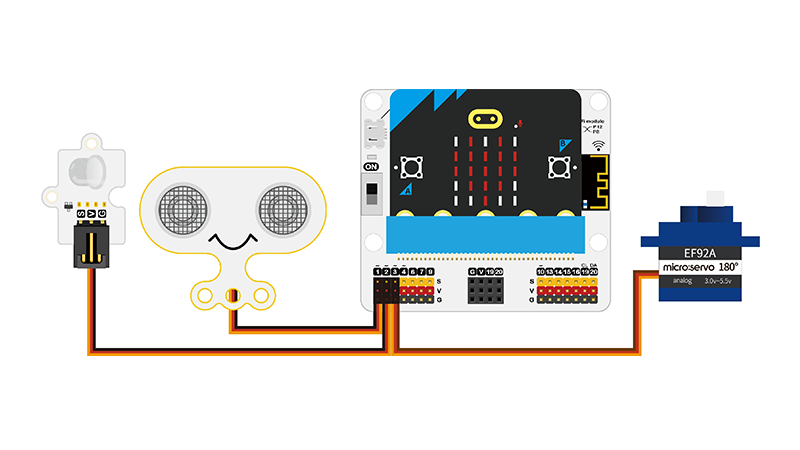
| Holes for Ultrasonic sensor 超音波感測器空位 | 1 |
| Holes for Dust sensor 灰塵感測器孔位 | 1 |
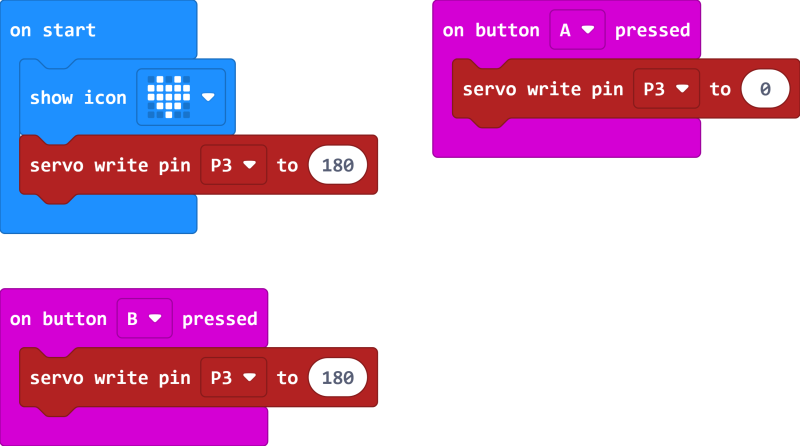
| Holes for Servo 伺服馬達孔位 | 2 |

 |  |  |  |  |