



使用 Wonder Building 套件製作摩托車。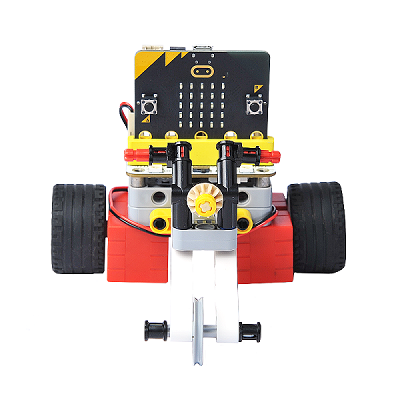
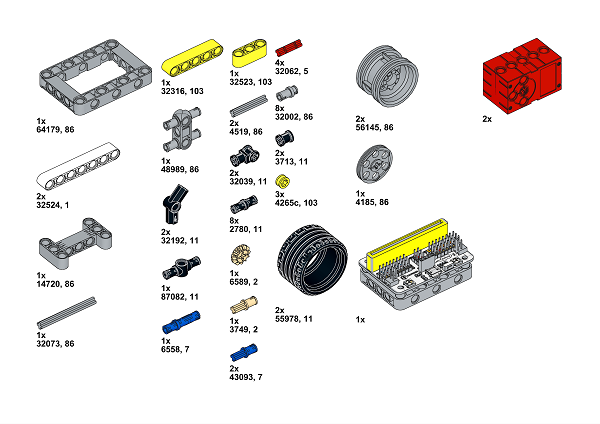
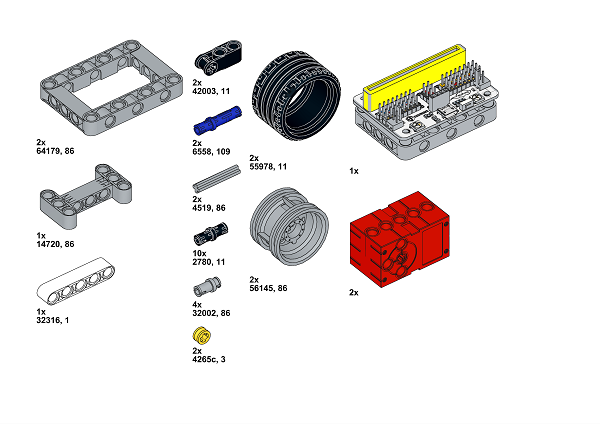
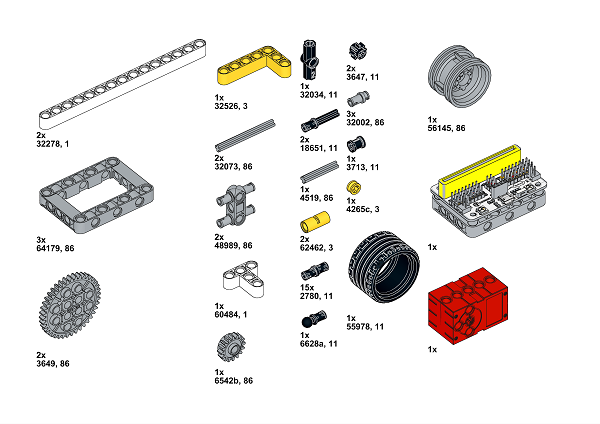
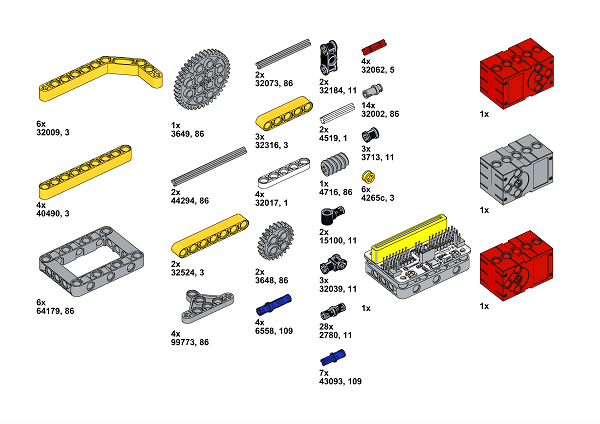
1.2. 所需材料
1.4. 編程平台
Microsoft MakeCode
1.5. 程式
添加擴充程式
先點擊MakeCode中的【Advanced】,再點擊【Extensions】以獲得更多擴充選項。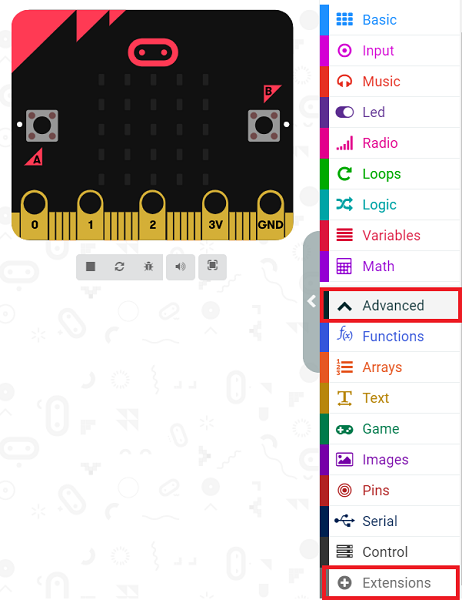
在對話框中輸入關鍵字:【wukong】並點擊圖案下載。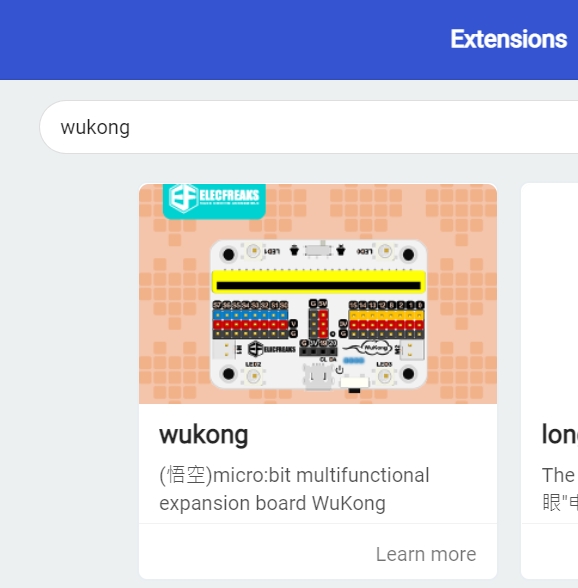
即可在選單找到下載好的【wukong】擴充程式。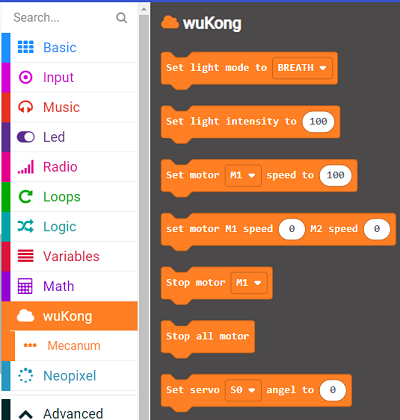
程式
使用 Wonder Building 套件製作一台循線車。
2.2. 所需材料
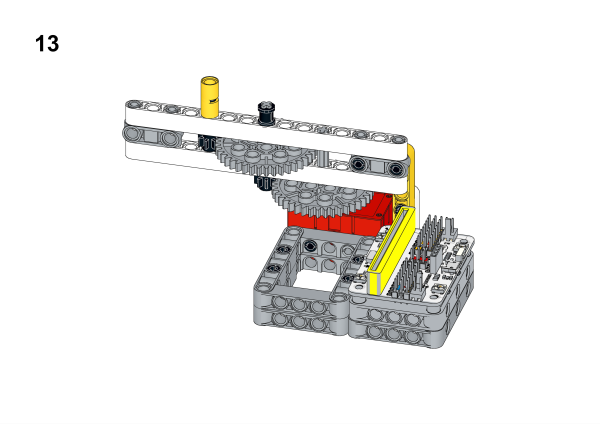
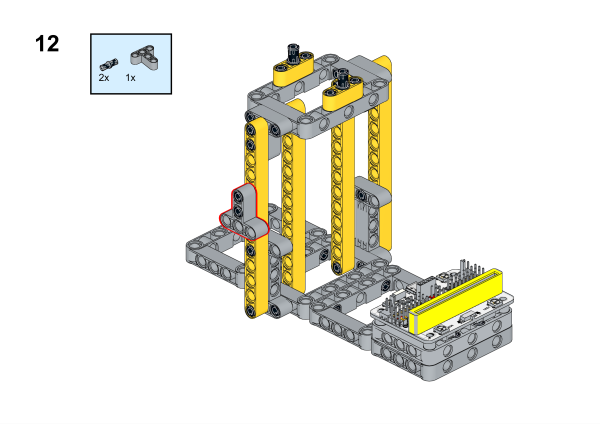
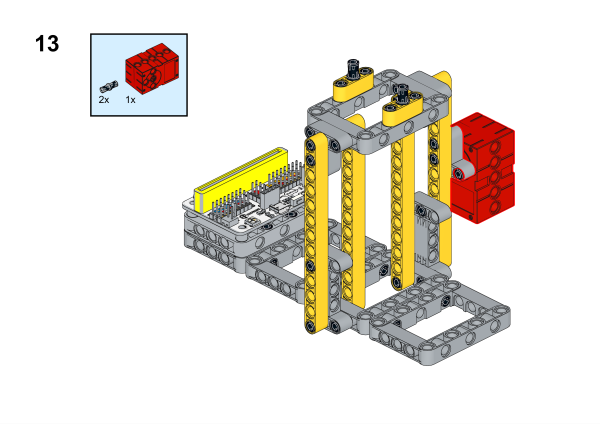
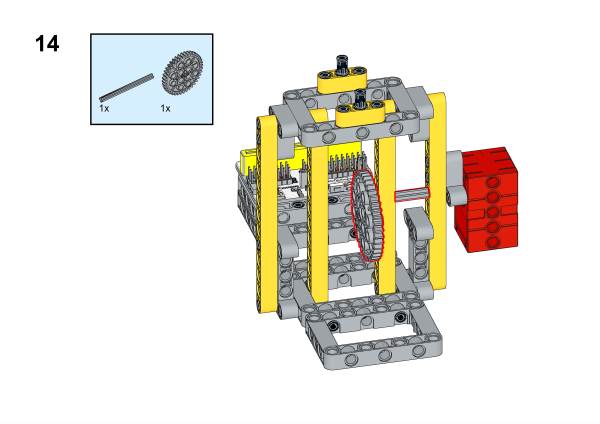
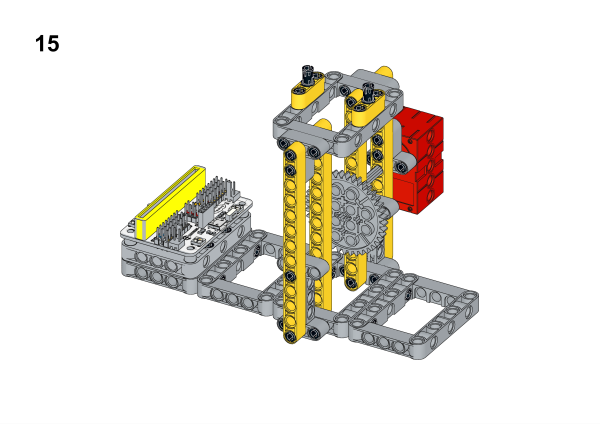
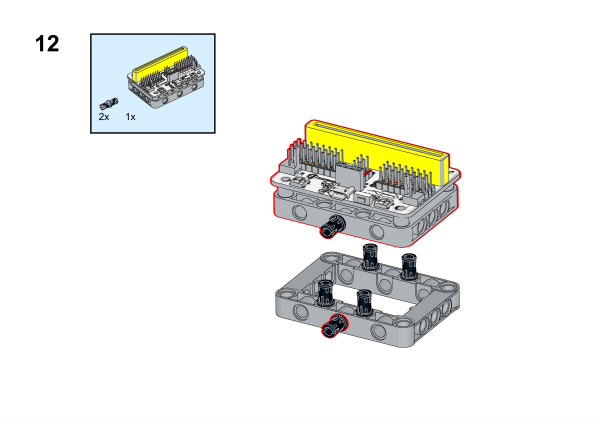
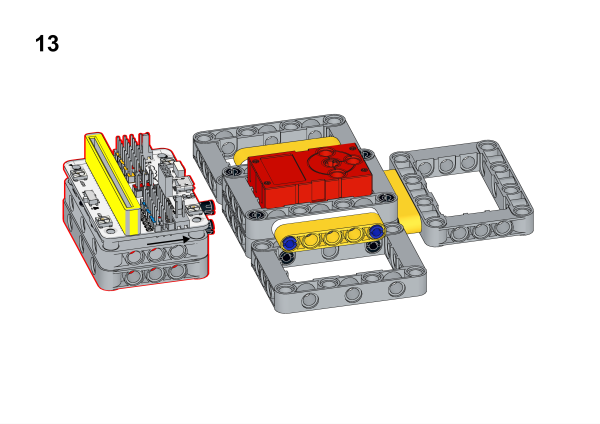
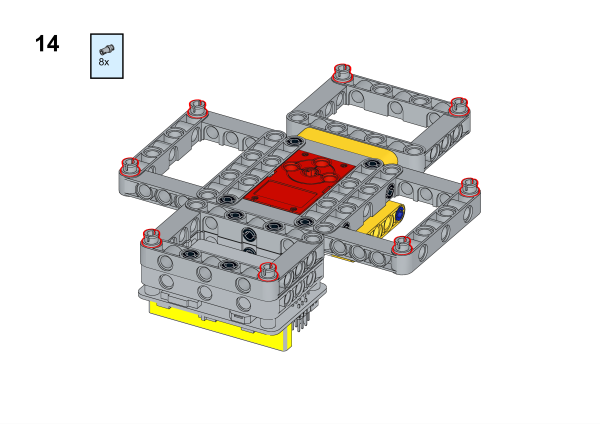
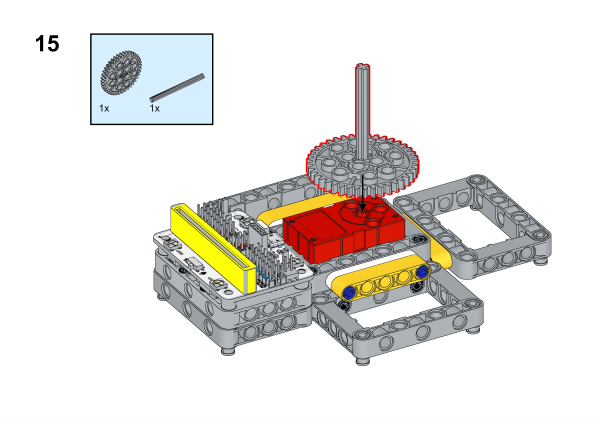
使用 Wonder Building 套件製作陀螺儀底座。
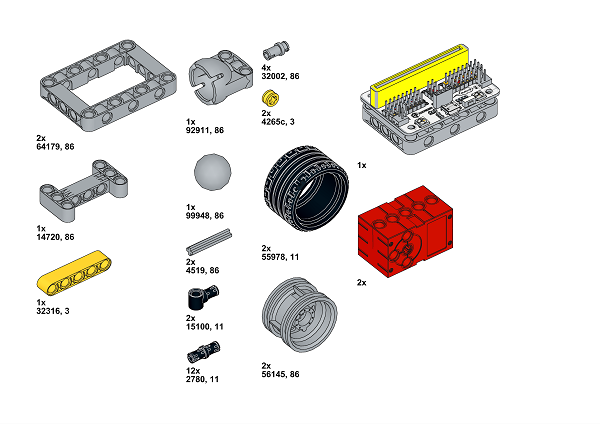
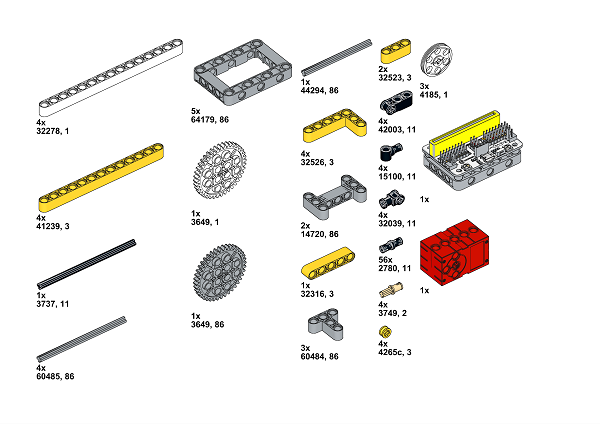
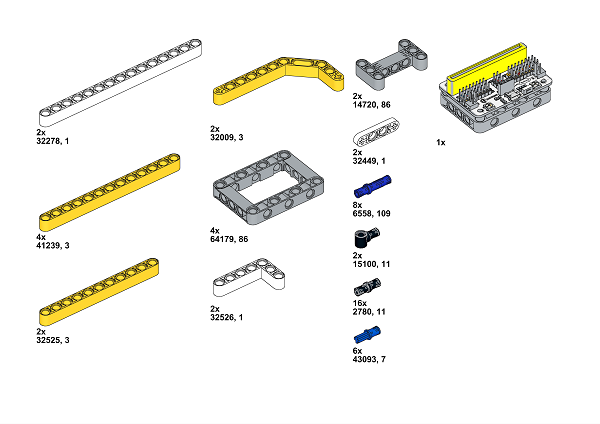
3.2. 所需材料
.png)
使用 Wonder Building 套件製作避障車。
4.2. 所需材料
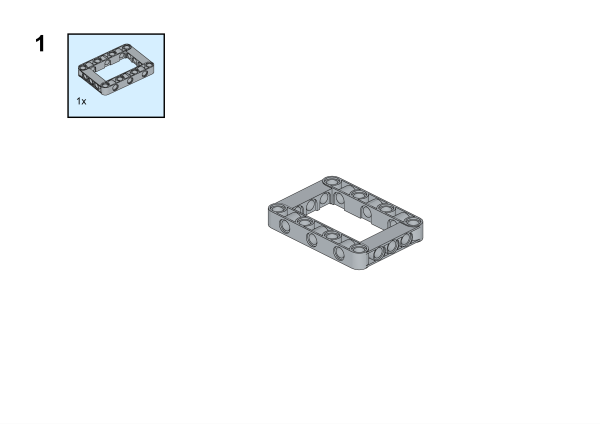
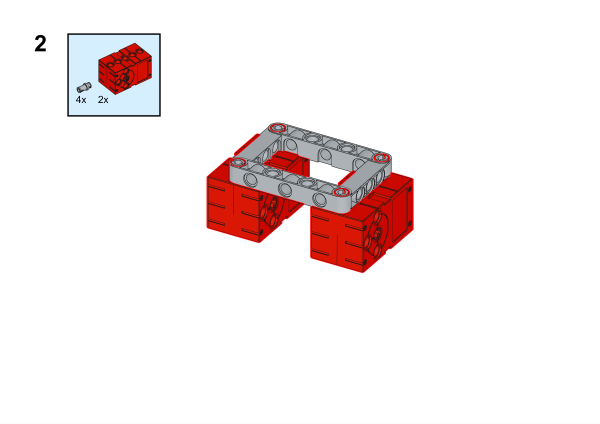
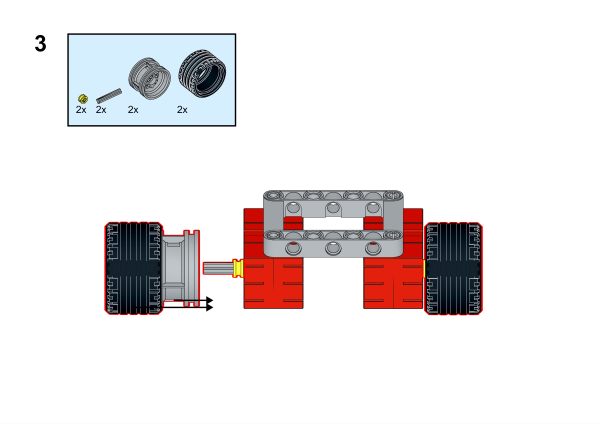
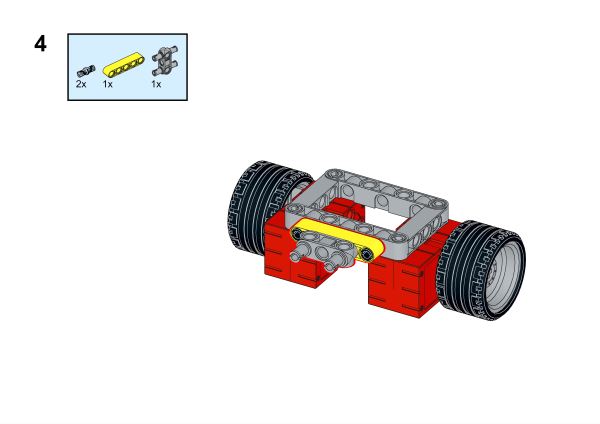
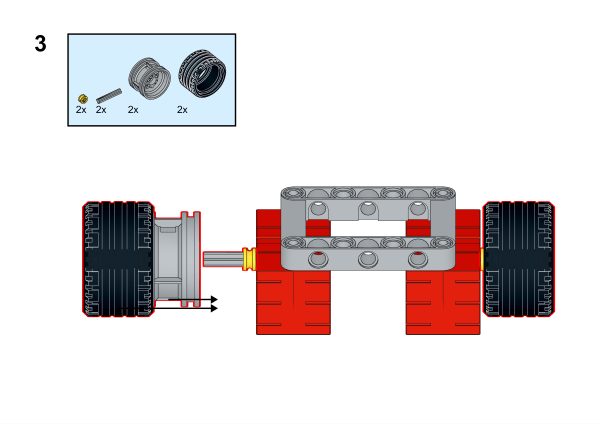
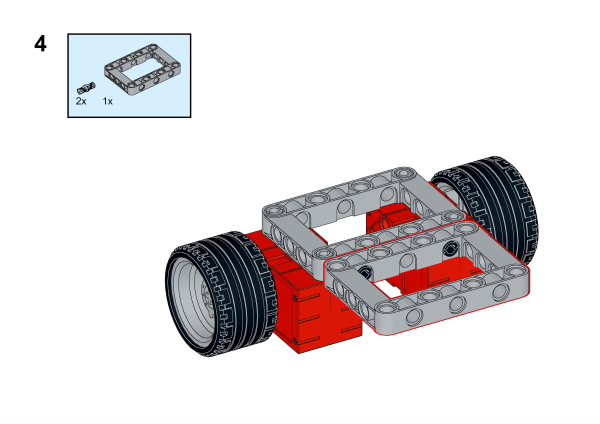
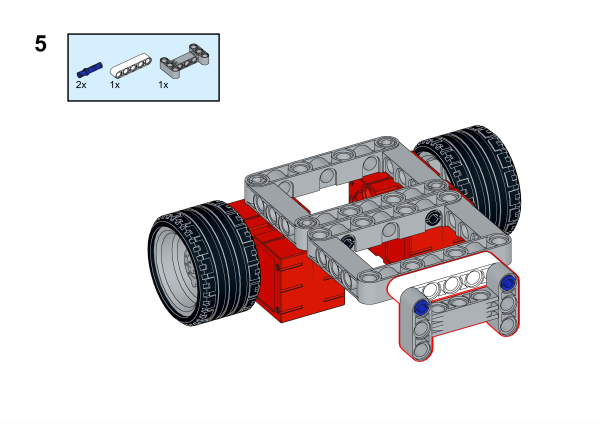
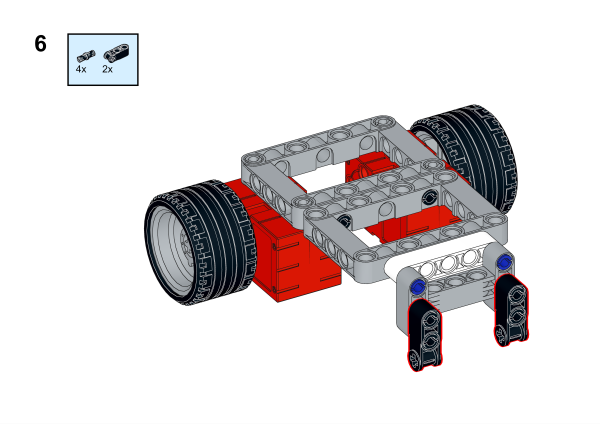
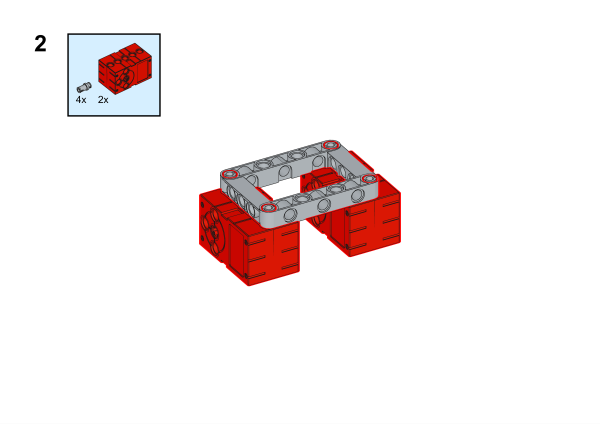
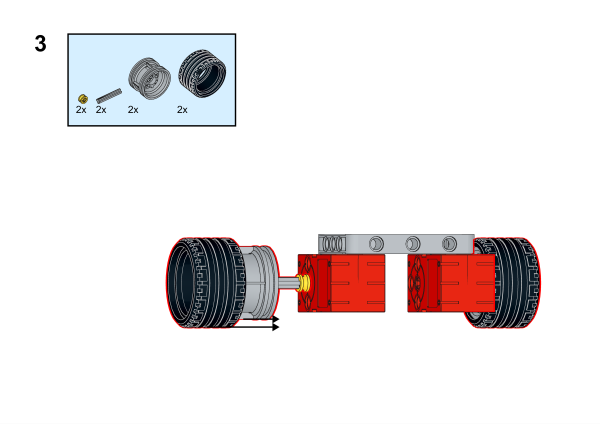
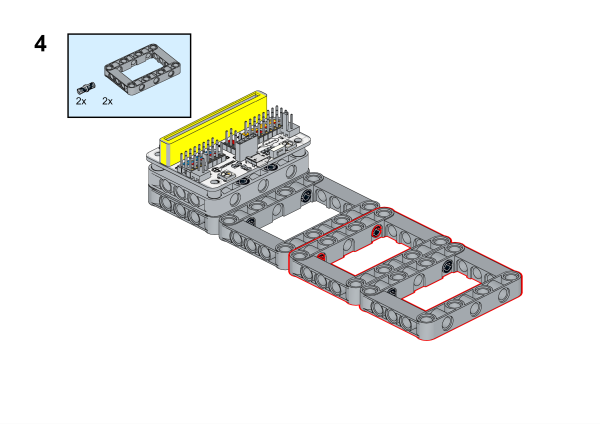
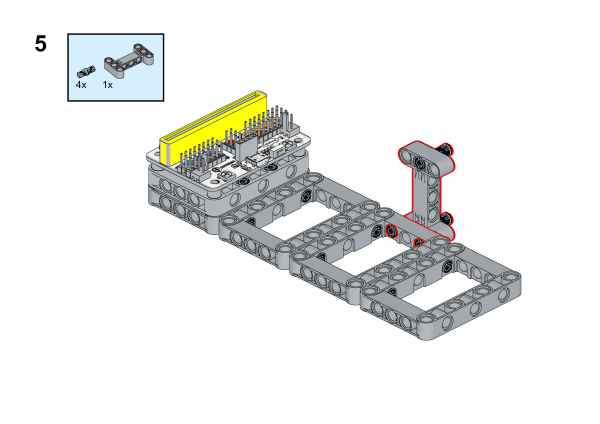
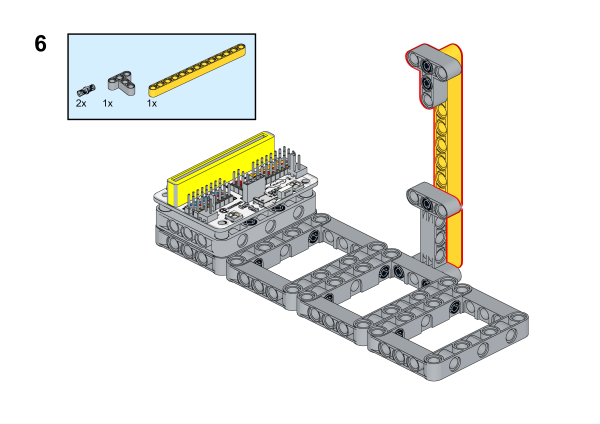
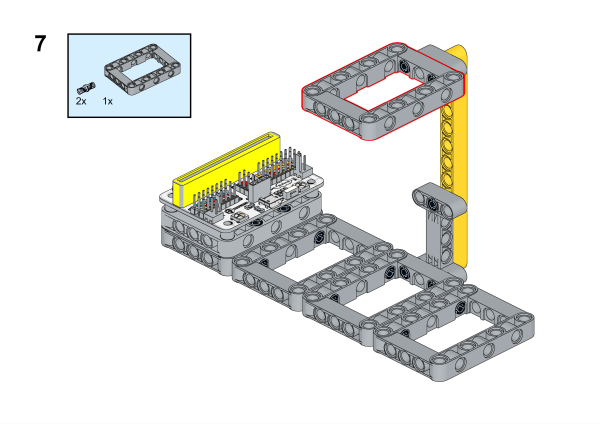
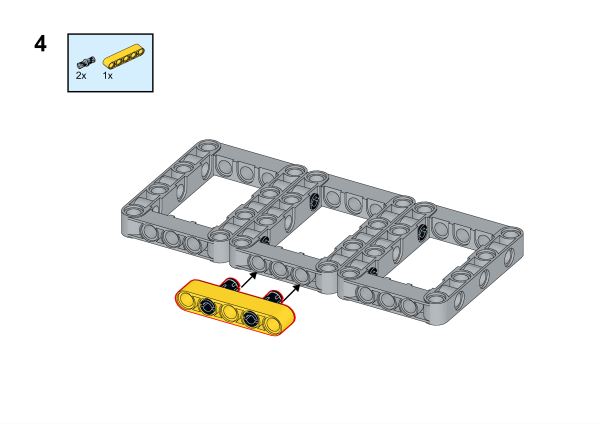
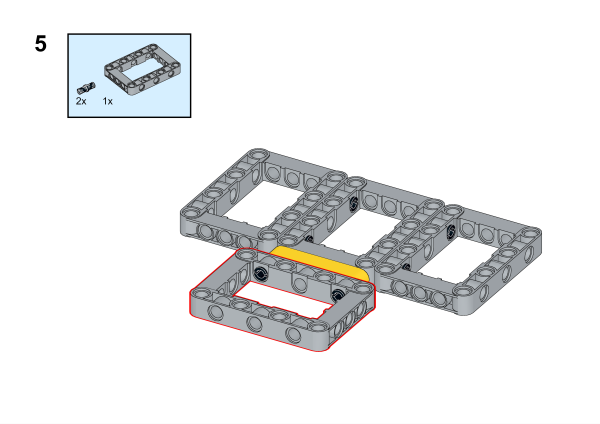
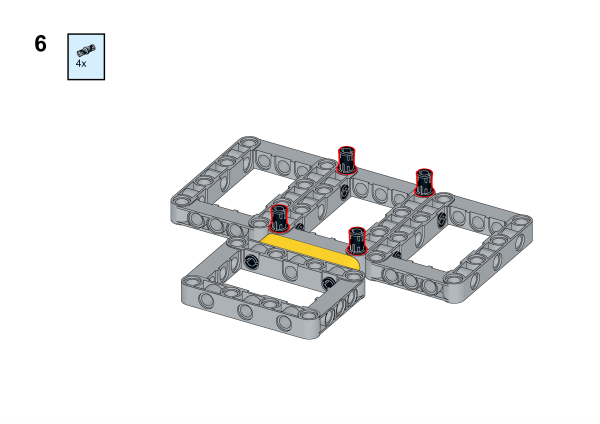
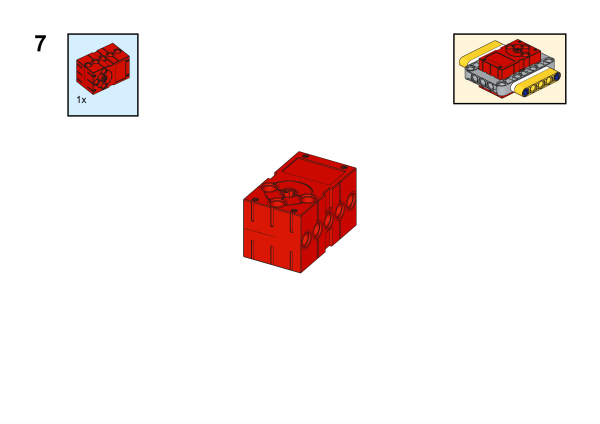
4.3. 組裝步驟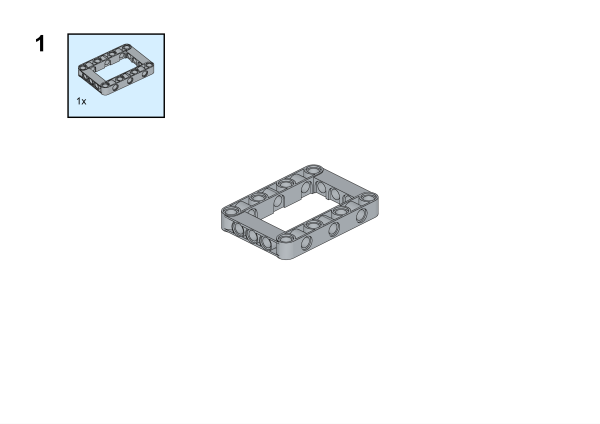
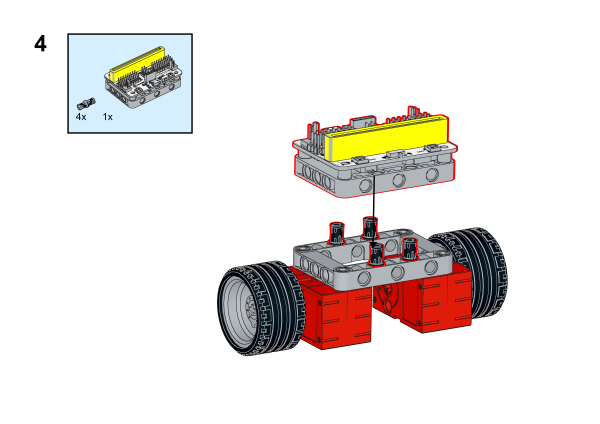
組裝影片連結:https://youtu.be/jYkSCfRpj1Y
4.4. 編程平台
Microsoft MakeCode
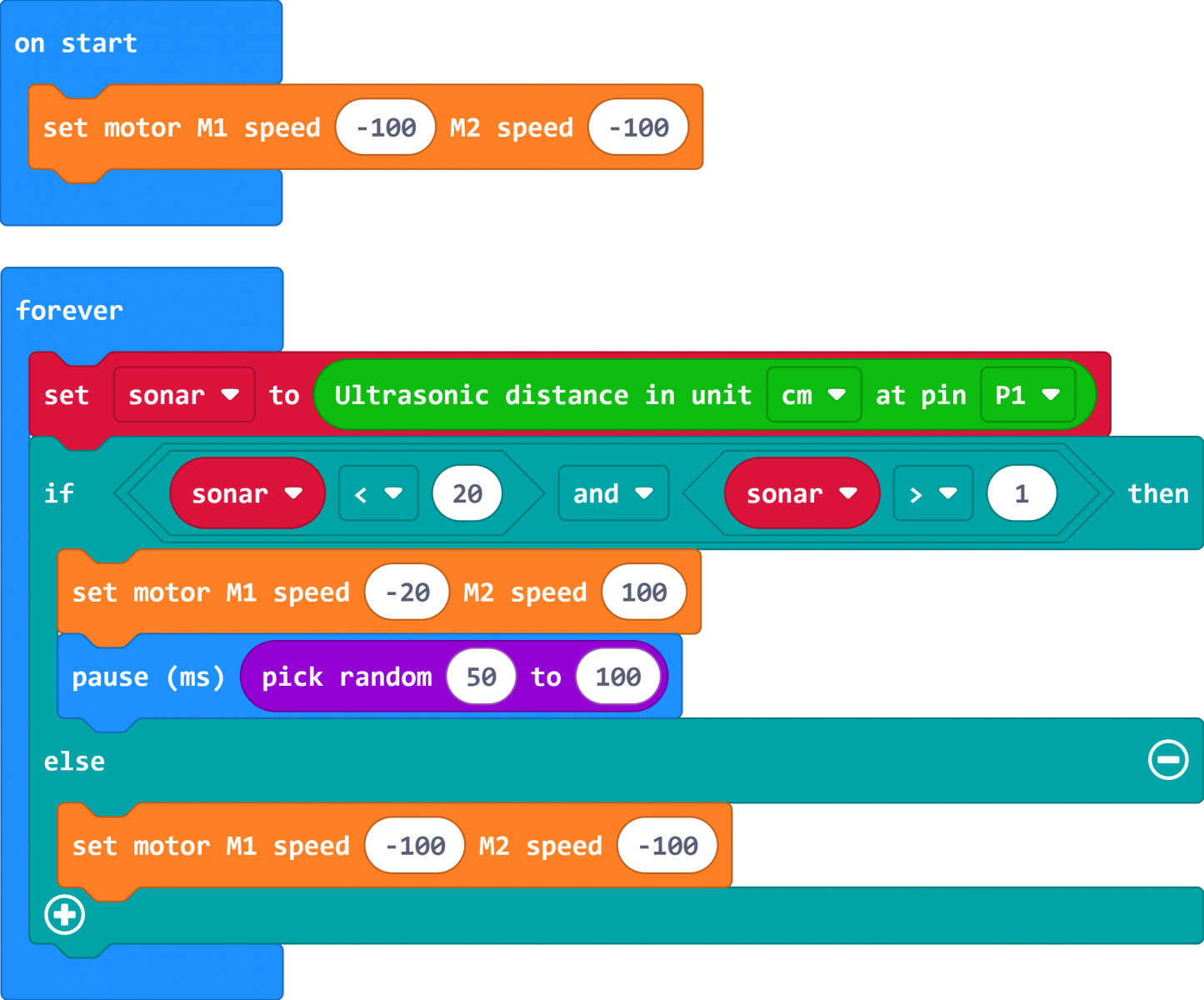
4.5. 程式
添加擴充程式
先點擊MakeCode中的【Advanced】,再點擊【Extensions】以獲得更多擴充選項。
在對話框中輸入關鍵字:【wukong】並點擊圖案下載。
即可在選單找到下載好的【wukong】擴充程式。
接著再以同樣方式到對話框中輸入網址:【https://github.com/elecfreaks/pxt-sonarbit】並點擊圖案下載。
即可在選單找到下載好的【Sonarbit】擴充程式。
程式
使用 Wonder Building 套件製作旋轉飛椅。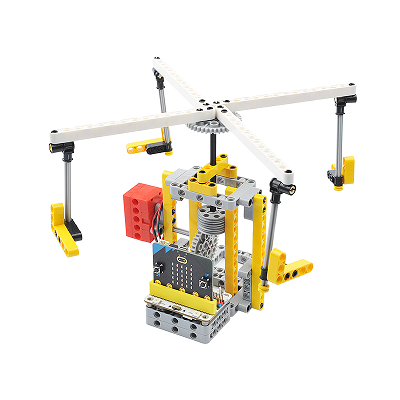
5.2. 所需材料
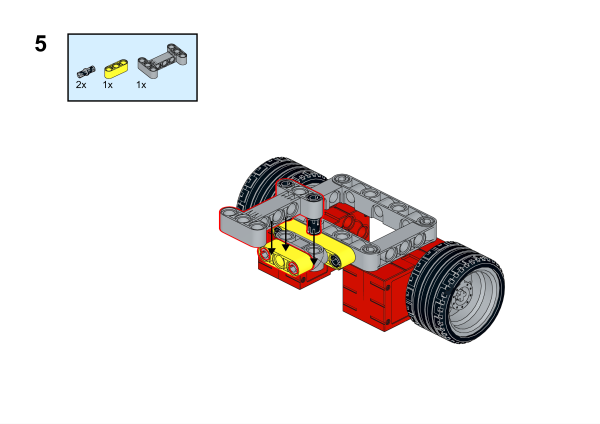
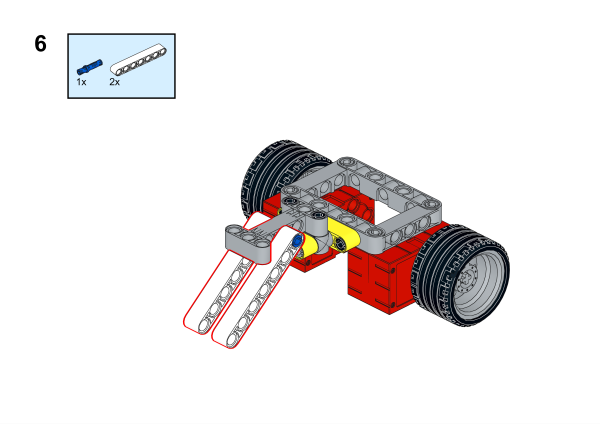
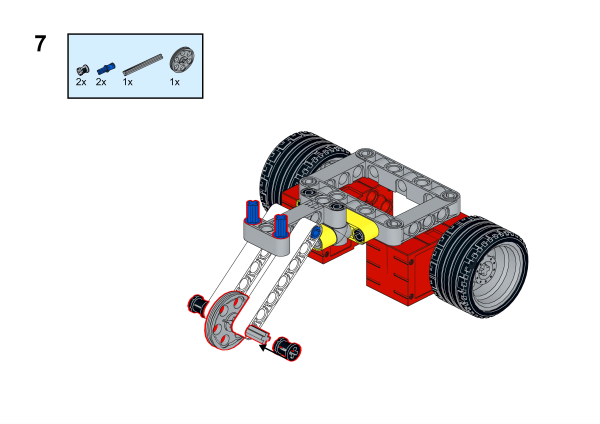
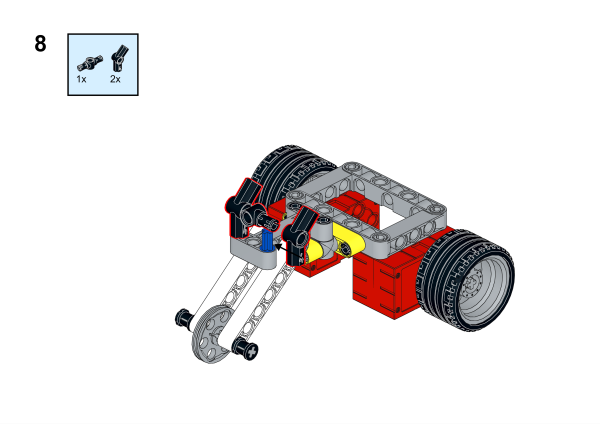
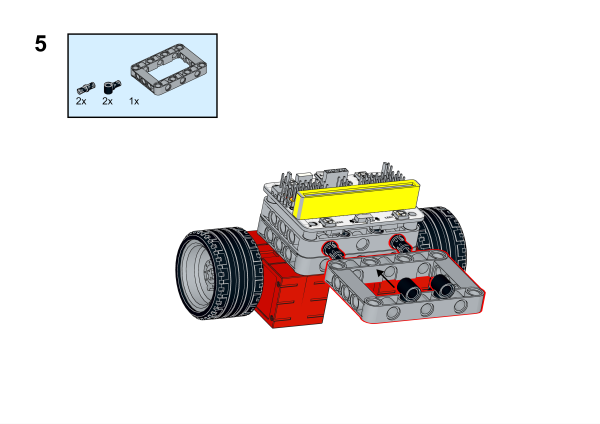
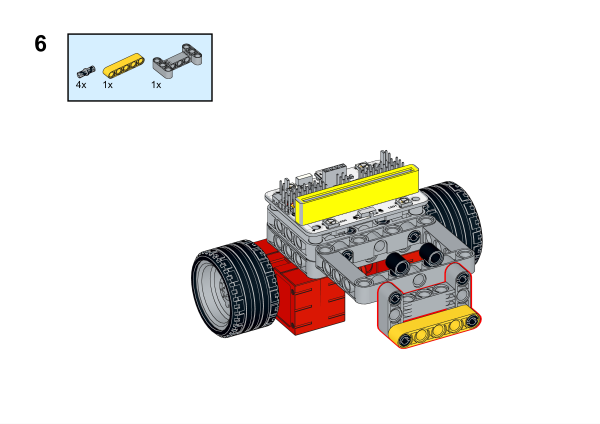
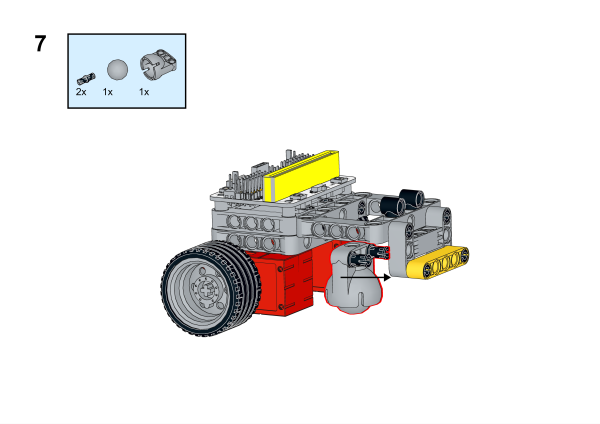
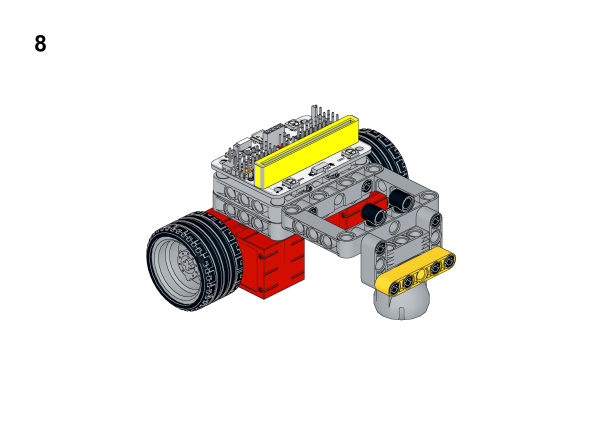
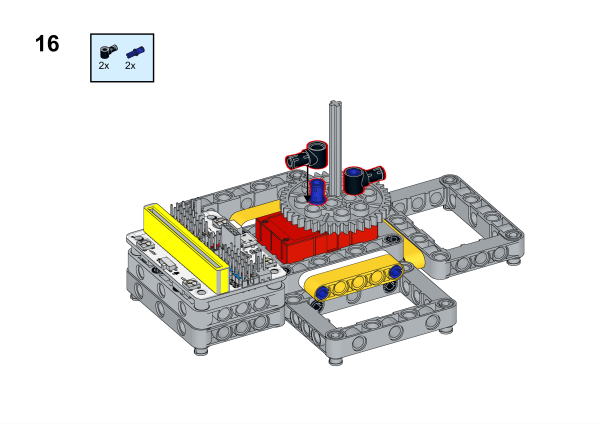
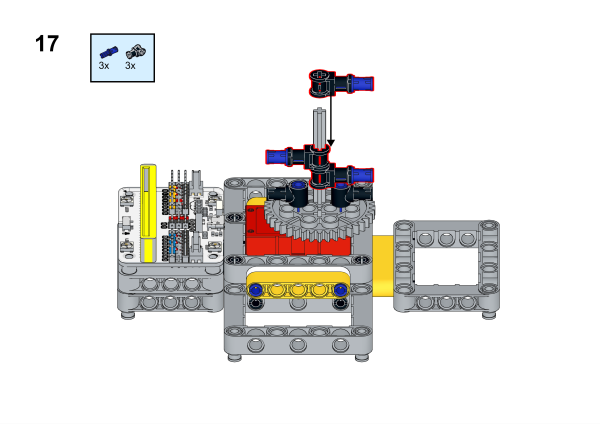
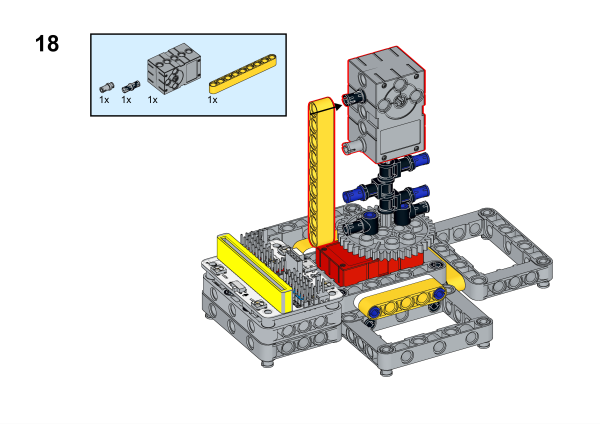
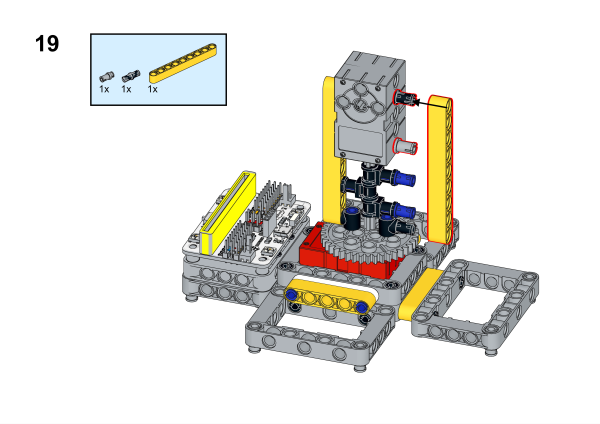
5.3. 組裝步驟
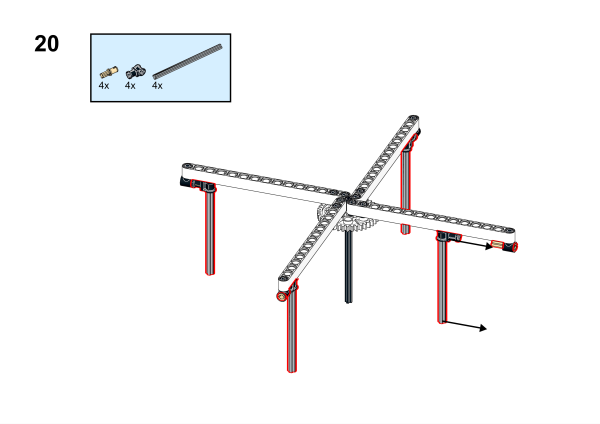

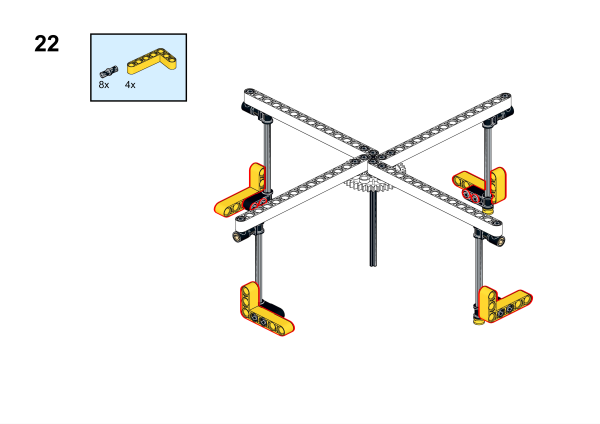
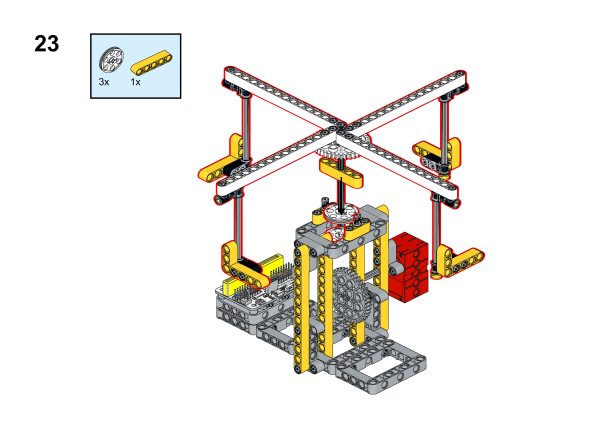
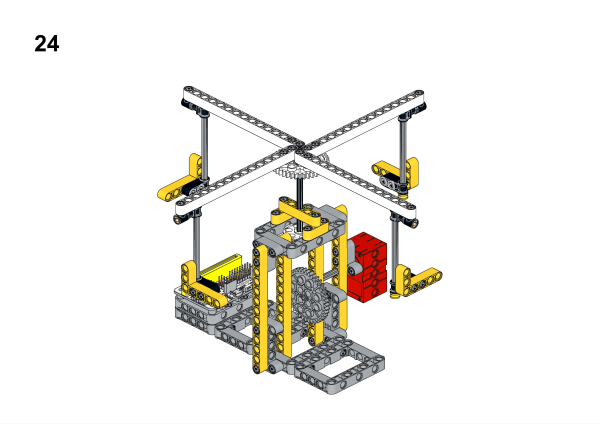
組裝影片連結:https://youtu.be/owKA9El5Or0
5.4. 編程平台
Microsoft MakeCode
5.5. 程式
添加擴充程式
先點擊MakeCode中的【Advanced】,再點擊【Extensions】以獲得更多擴充選項。
在對話框中輸入關鍵字:【wukong】並點擊圖案下載。
即可在選單找到下載好的【wukong】擴充程式。
程式
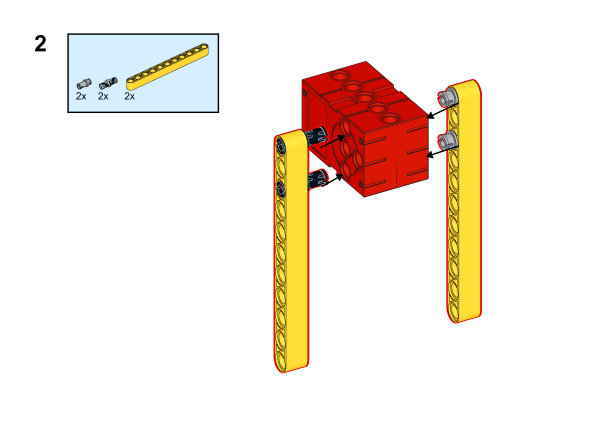
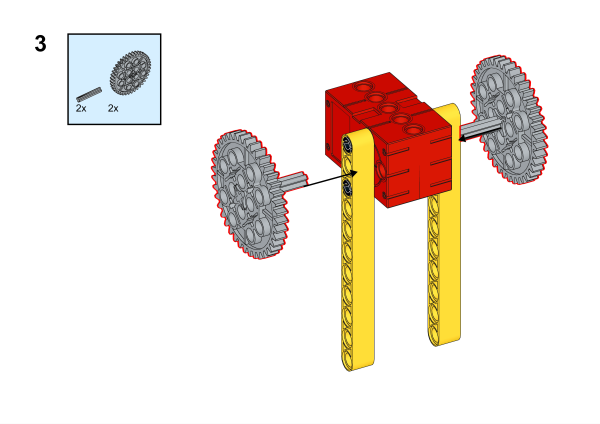
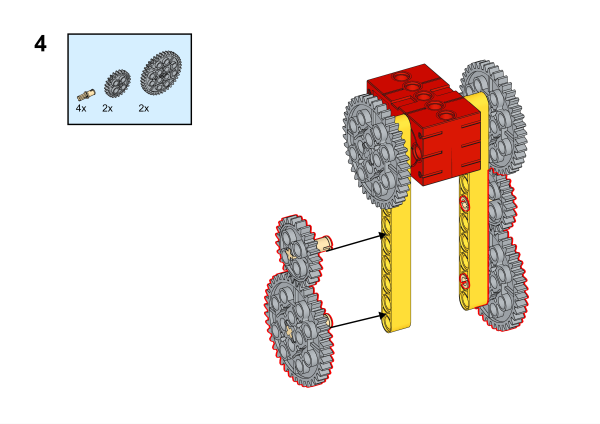
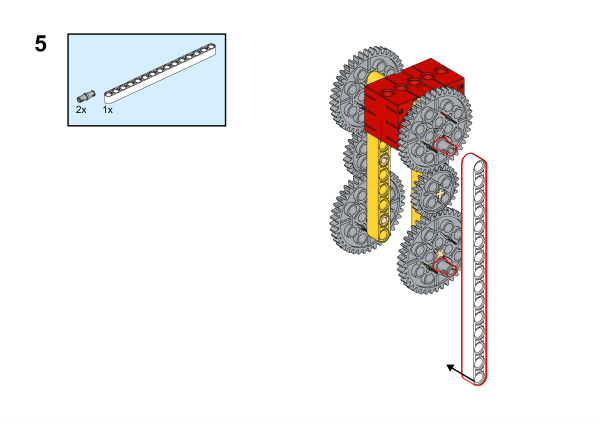
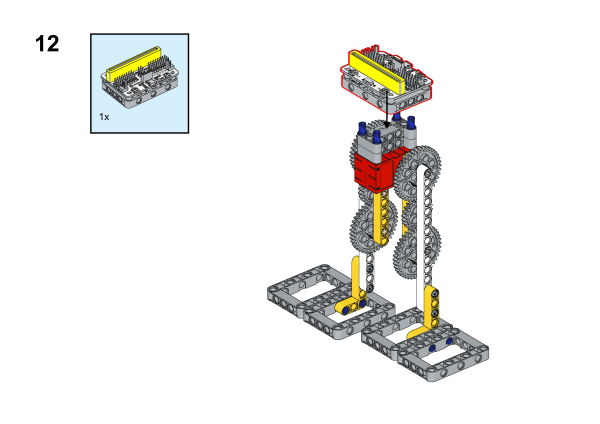
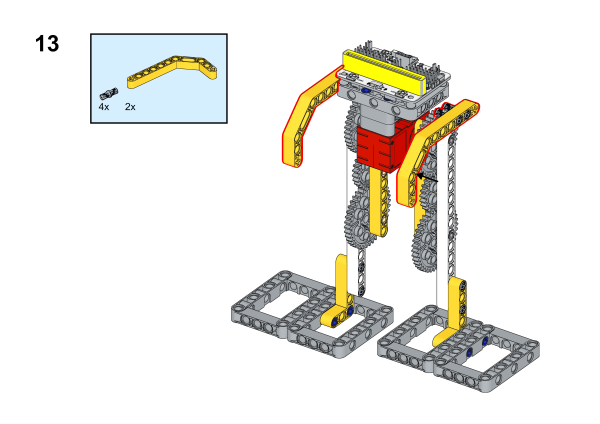
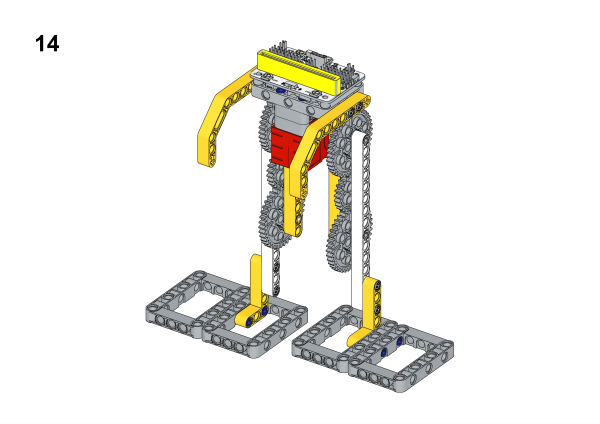
使用 Wonder Building 套件製作大腳怪。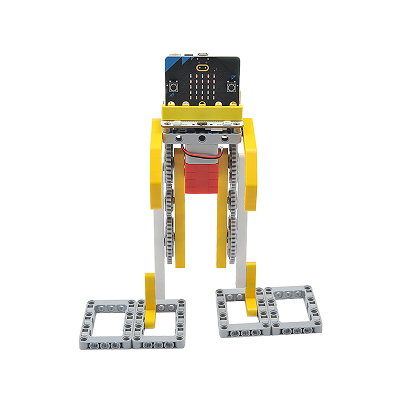
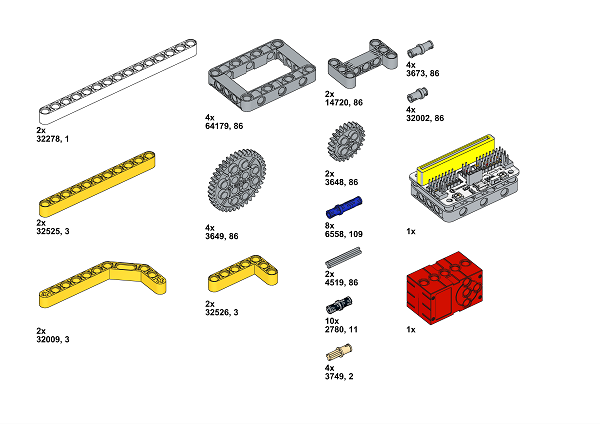
6.2. 所需材料
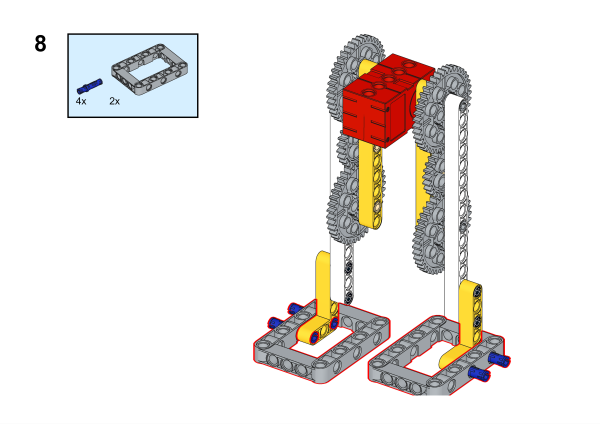
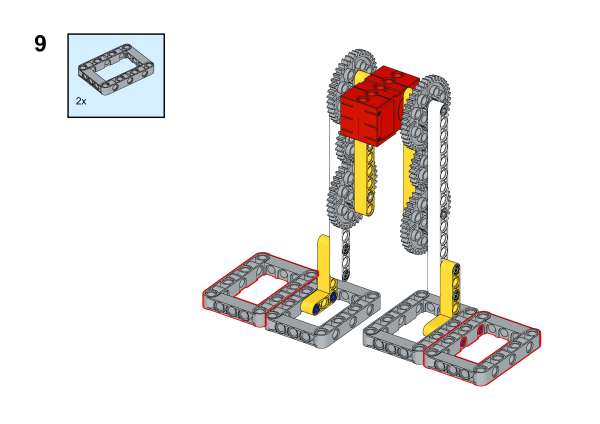
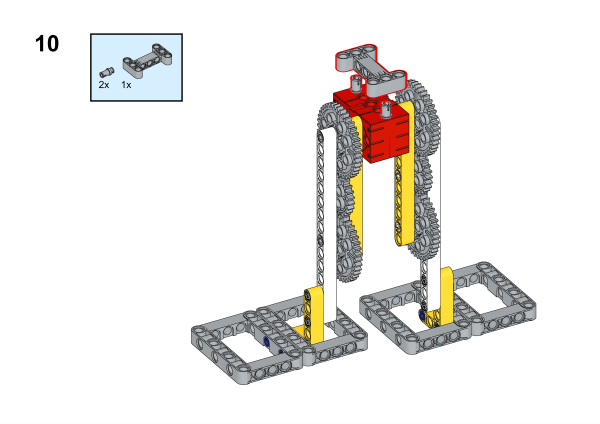
6.3. 組裝步驟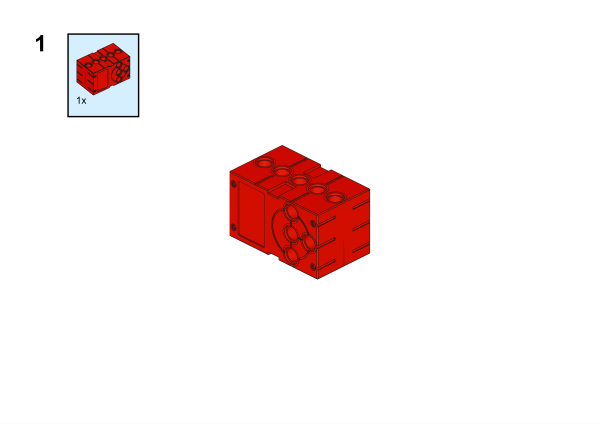
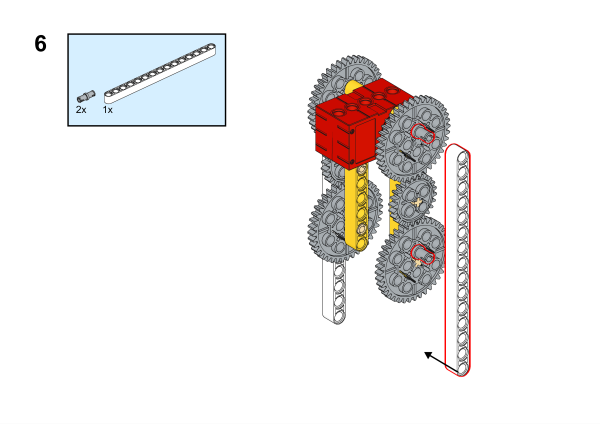
.png)
.png)
組裝影片連結:https://youtu.be/ODPzpMuwe7I
6.4. 編程平台
Microsoft MakeCode
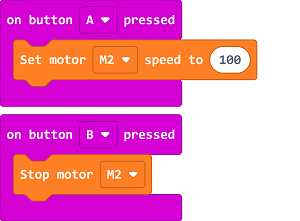
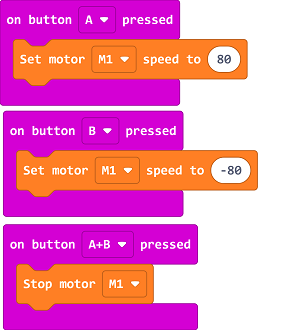
6.5. 程式
添加擴充程式
先點擊MakeCode中的【Advanced】,再點擊【Extensions】以獲得更多擴充選項。
在對話框中輸入關鍵字:【wukong】並點擊圖案下載。
即可在選單找到下載好的【wukong】擴充程式。
程式
使用 Wonder Building 套件製作籃球計數器。
7.2. 所需材料
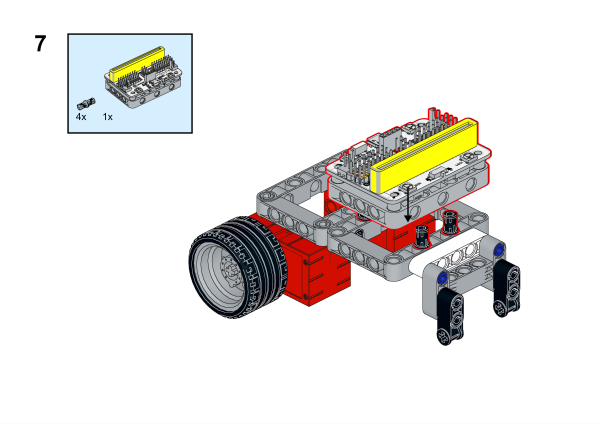
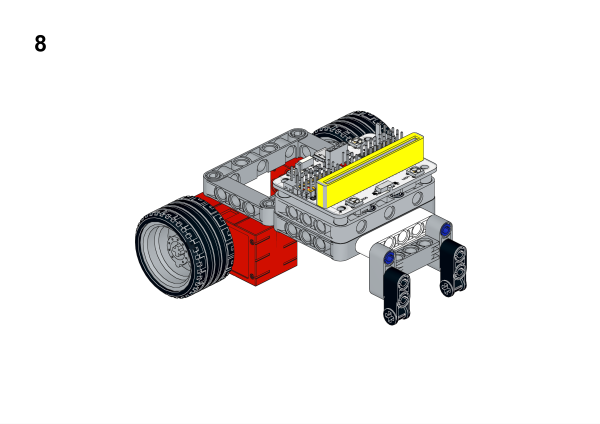
7.3. 組裝步驟
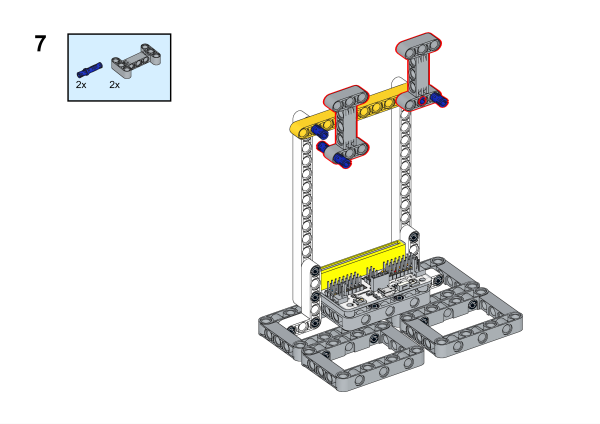
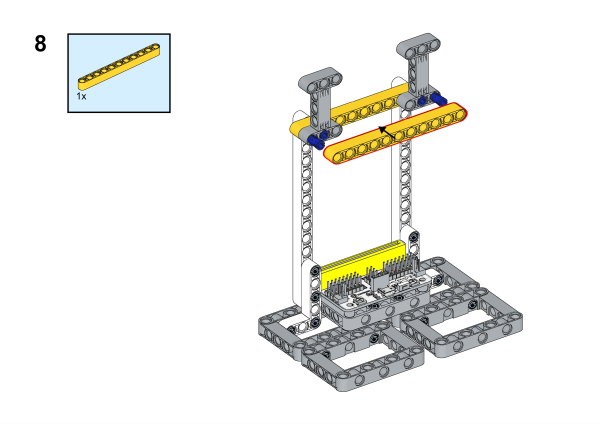
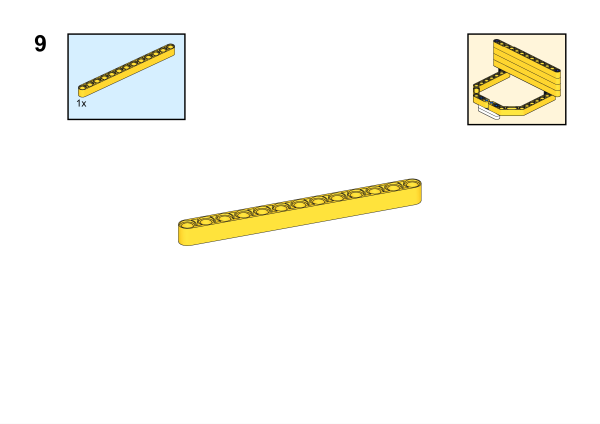
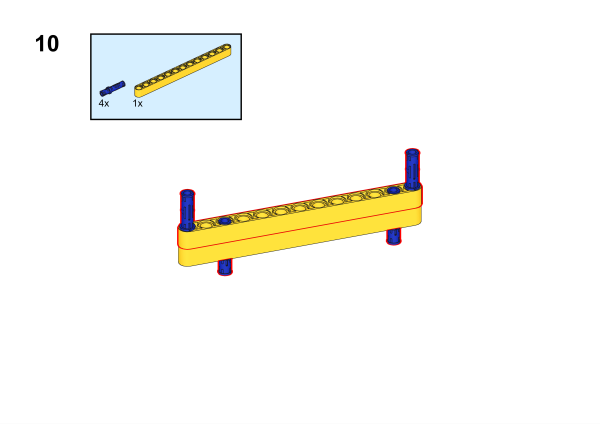
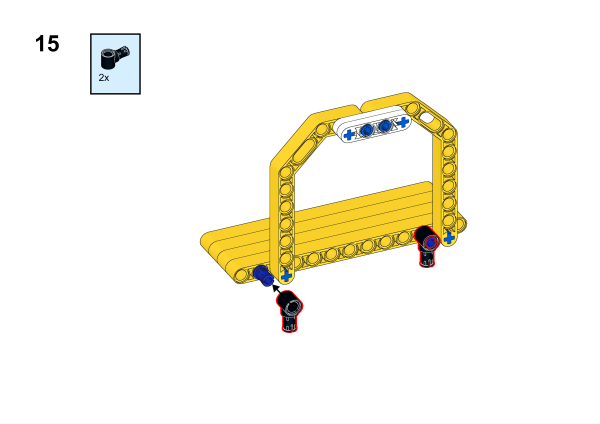
.png)
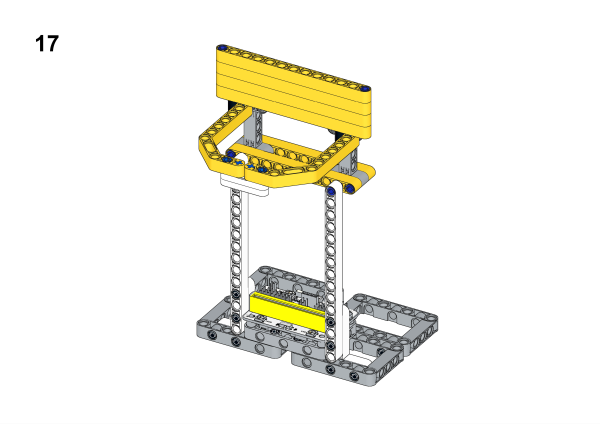
組裝影片連結:https://youtu.be/0P88GP4RQaw
7.4. 編程平台
Microsoft MakeCode
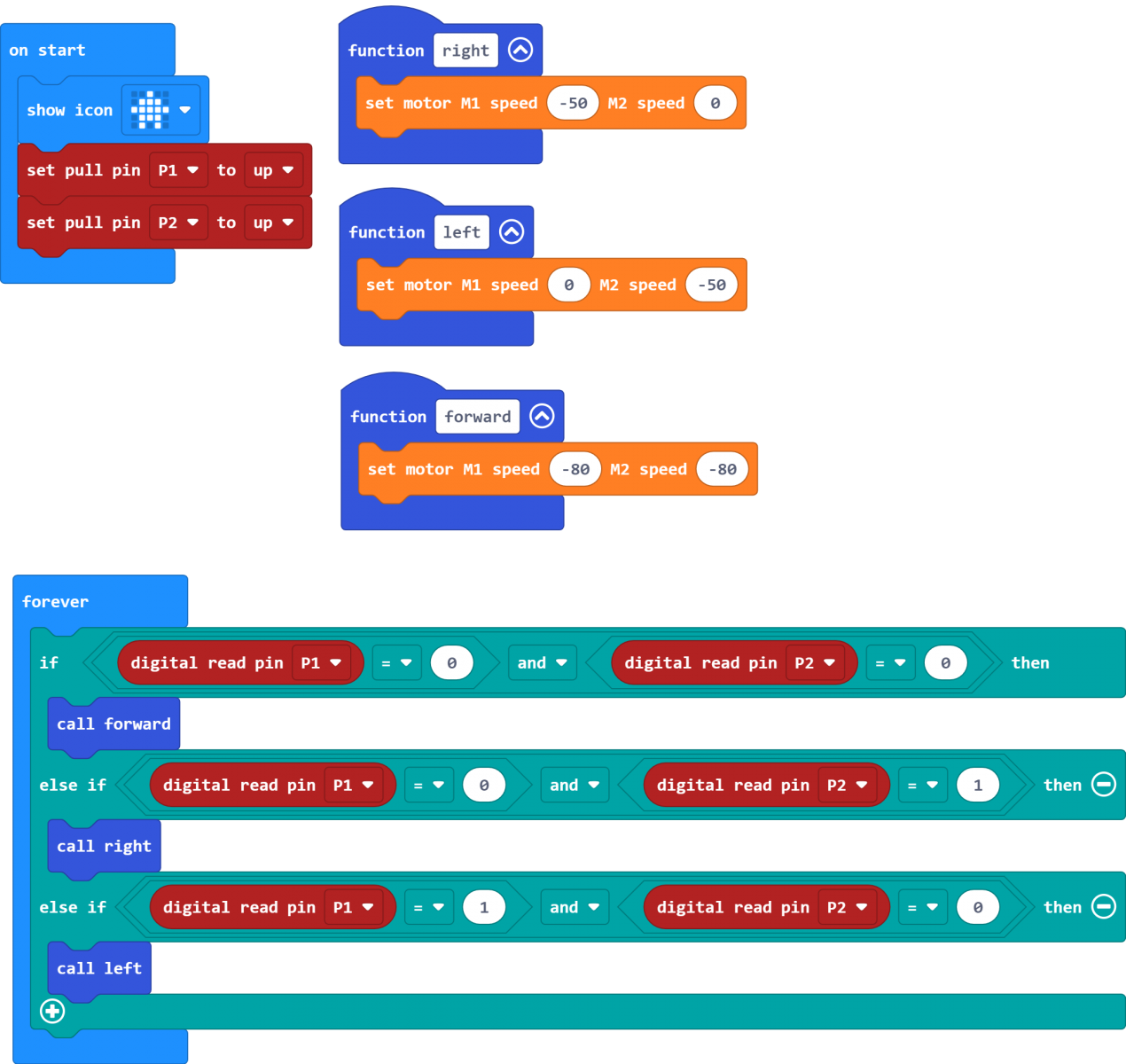
7.5. 程式
添加擴充程式
先點擊MakeCode中的【Advanced】,再點擊【Extensions】以獲得更多擴充選項。
在對話框中輸入關鍵字:【wukong】並點擊圖案下載。
即可在選單找到下載好的【wukong】擴充程式。
接著再以同樣方式到對話框中輸入網址:【https://github.com/elecfreaks/pxt-sonarbit】並點擊圖案下載。
即可在選單找到下載好的【Sonarbit】擴充程式。
程式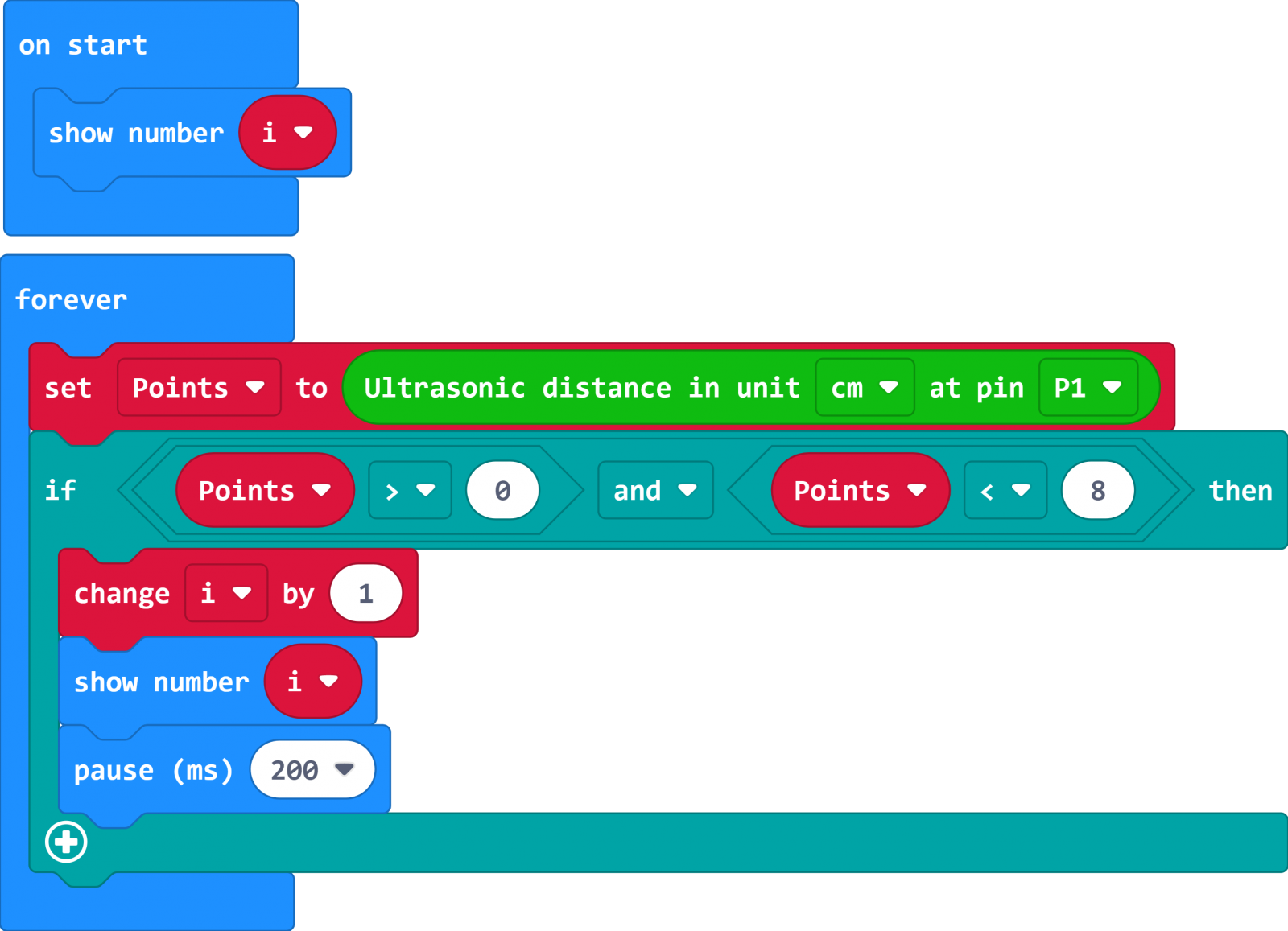
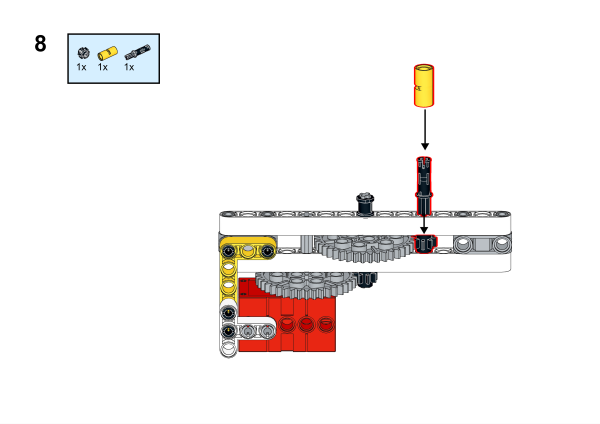
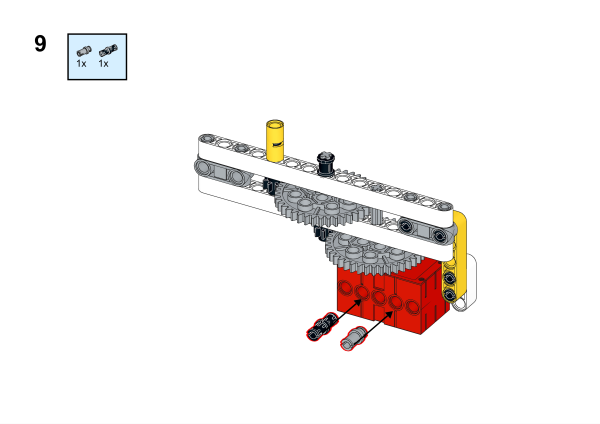
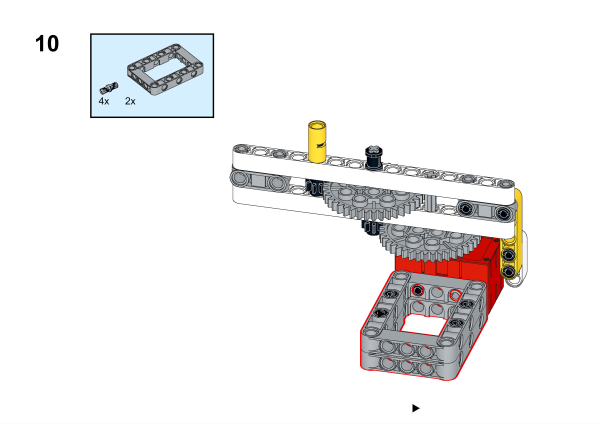
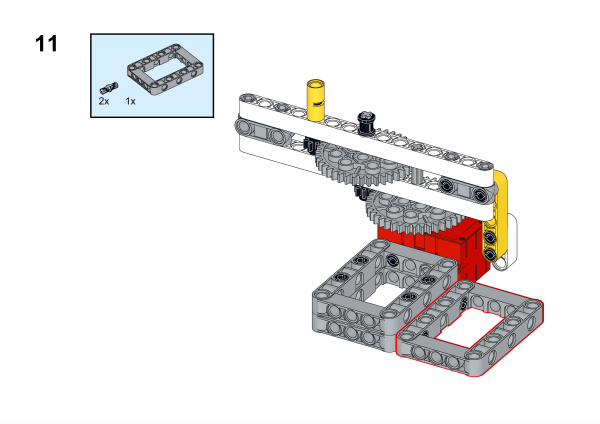
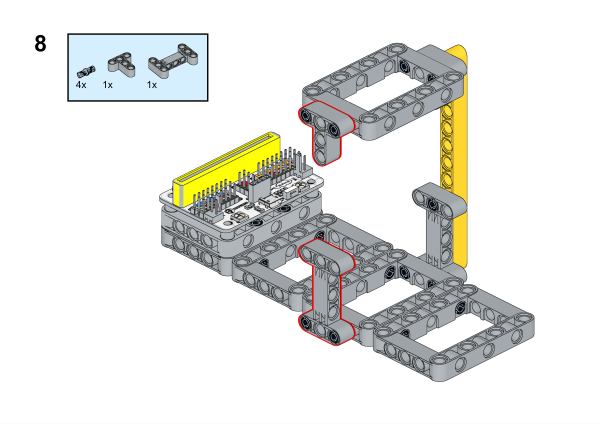
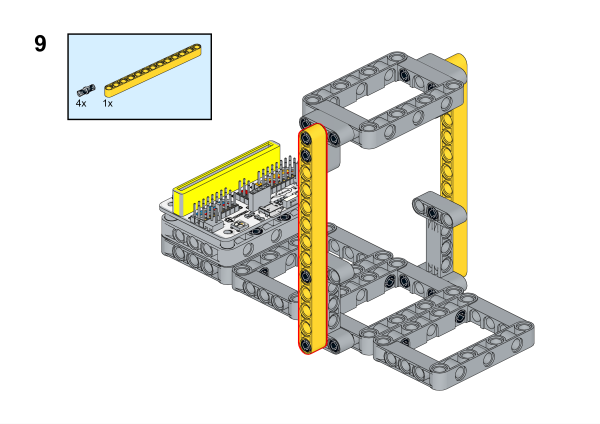
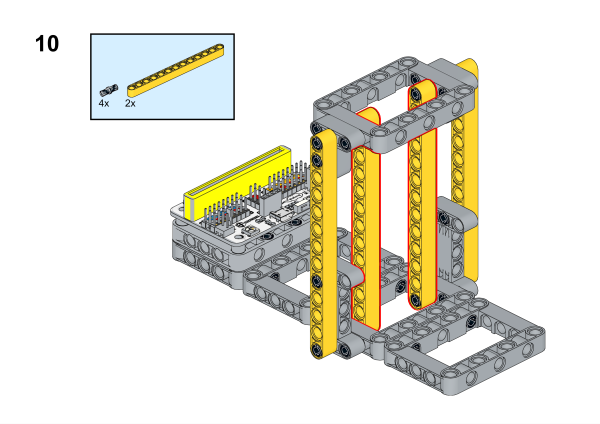
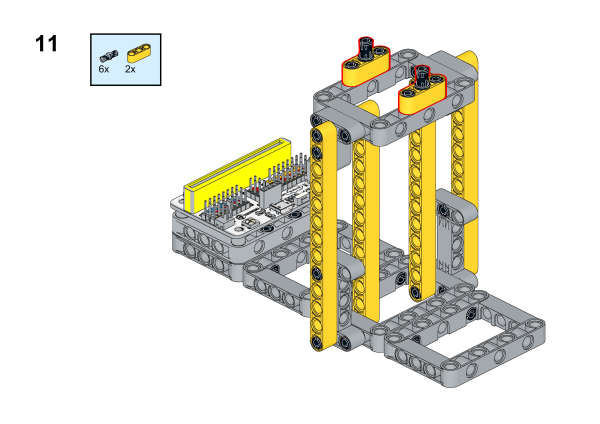
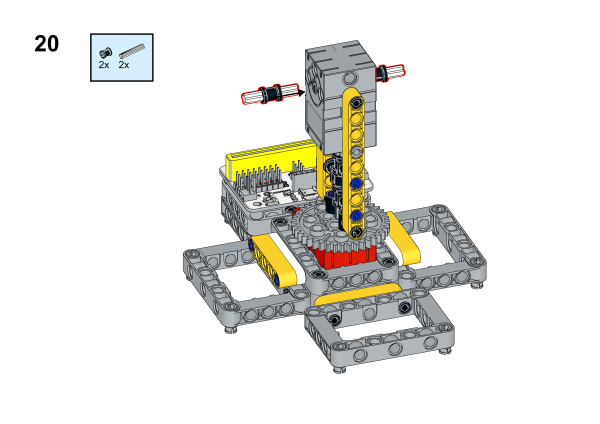
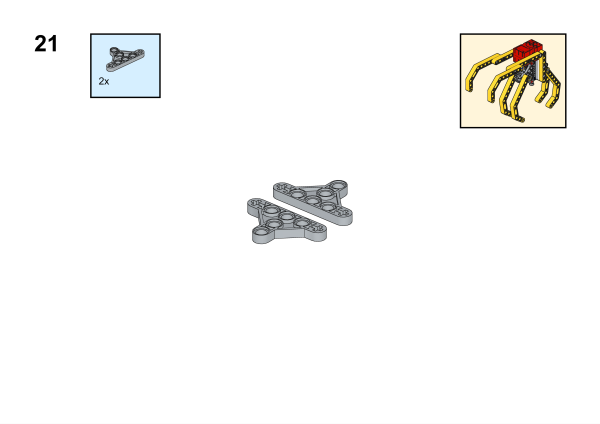
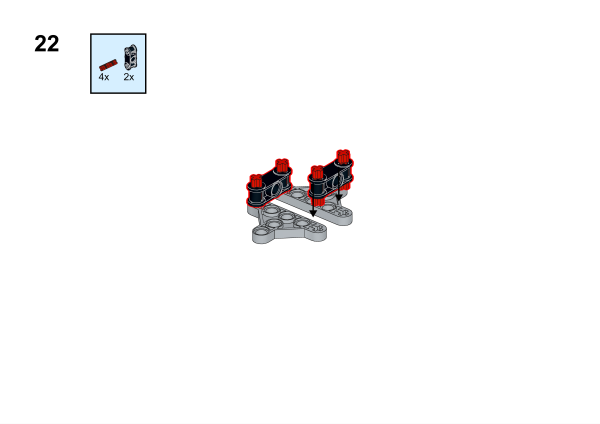
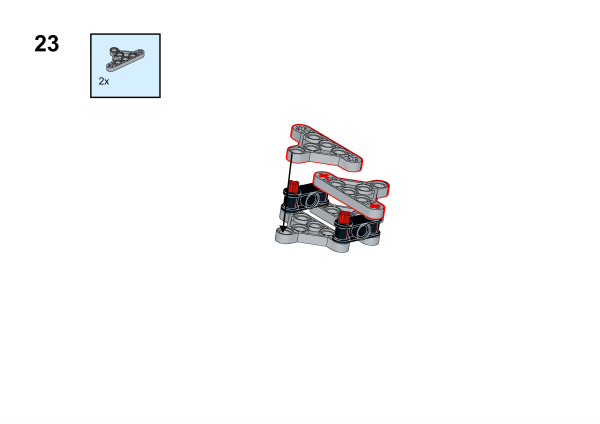
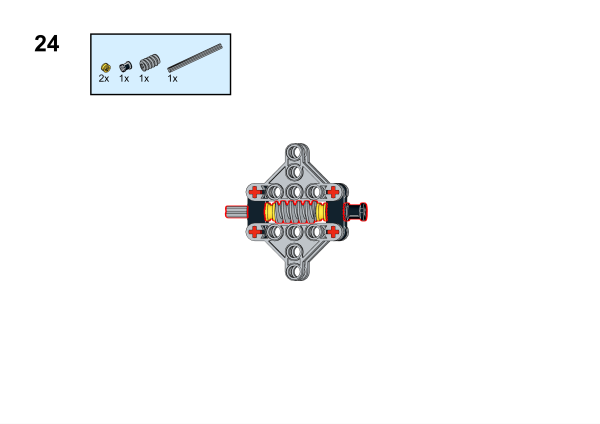
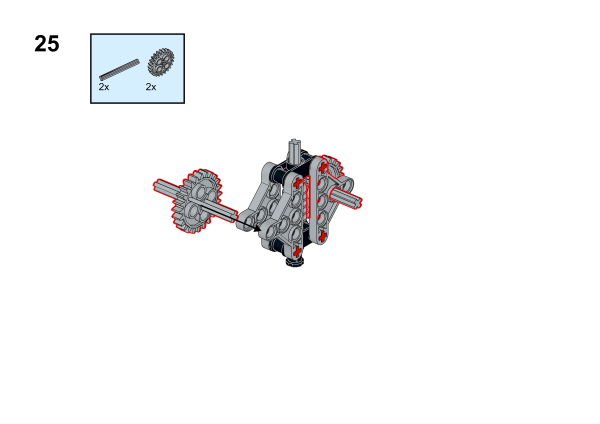
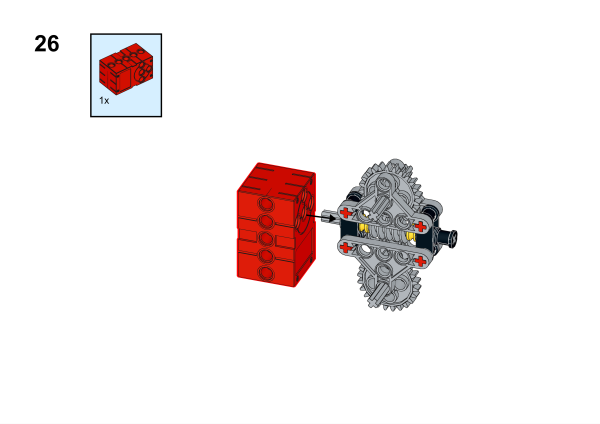
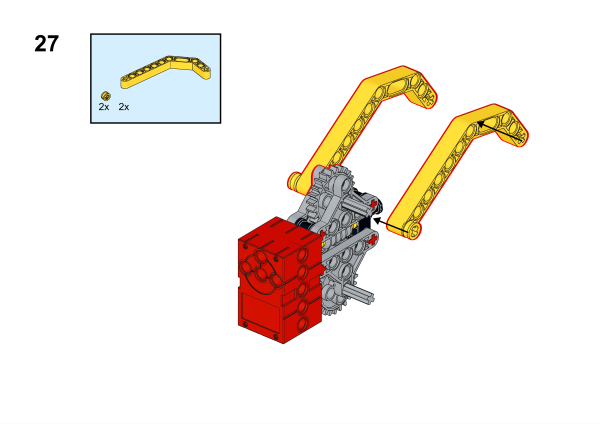
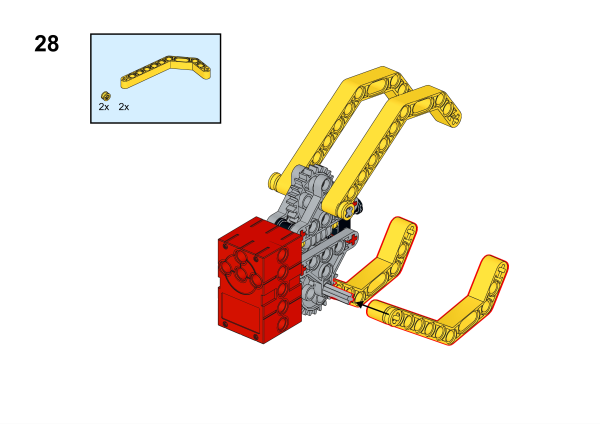
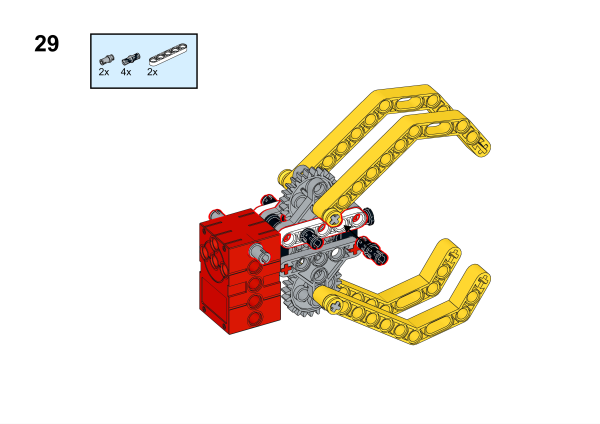
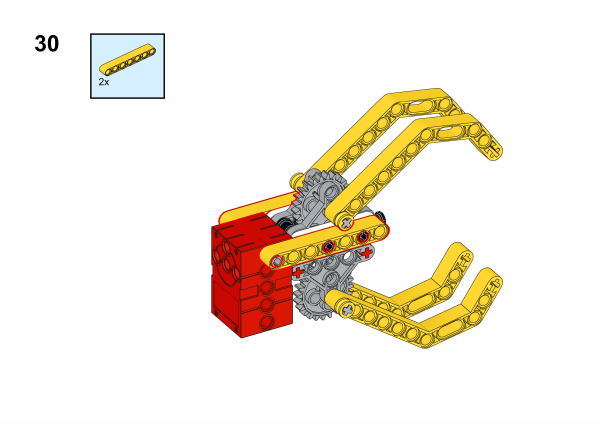
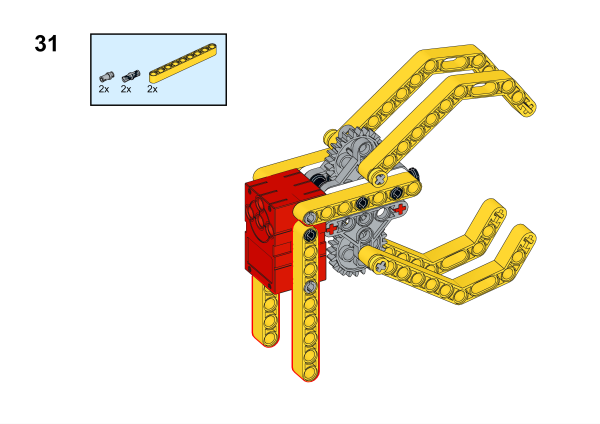
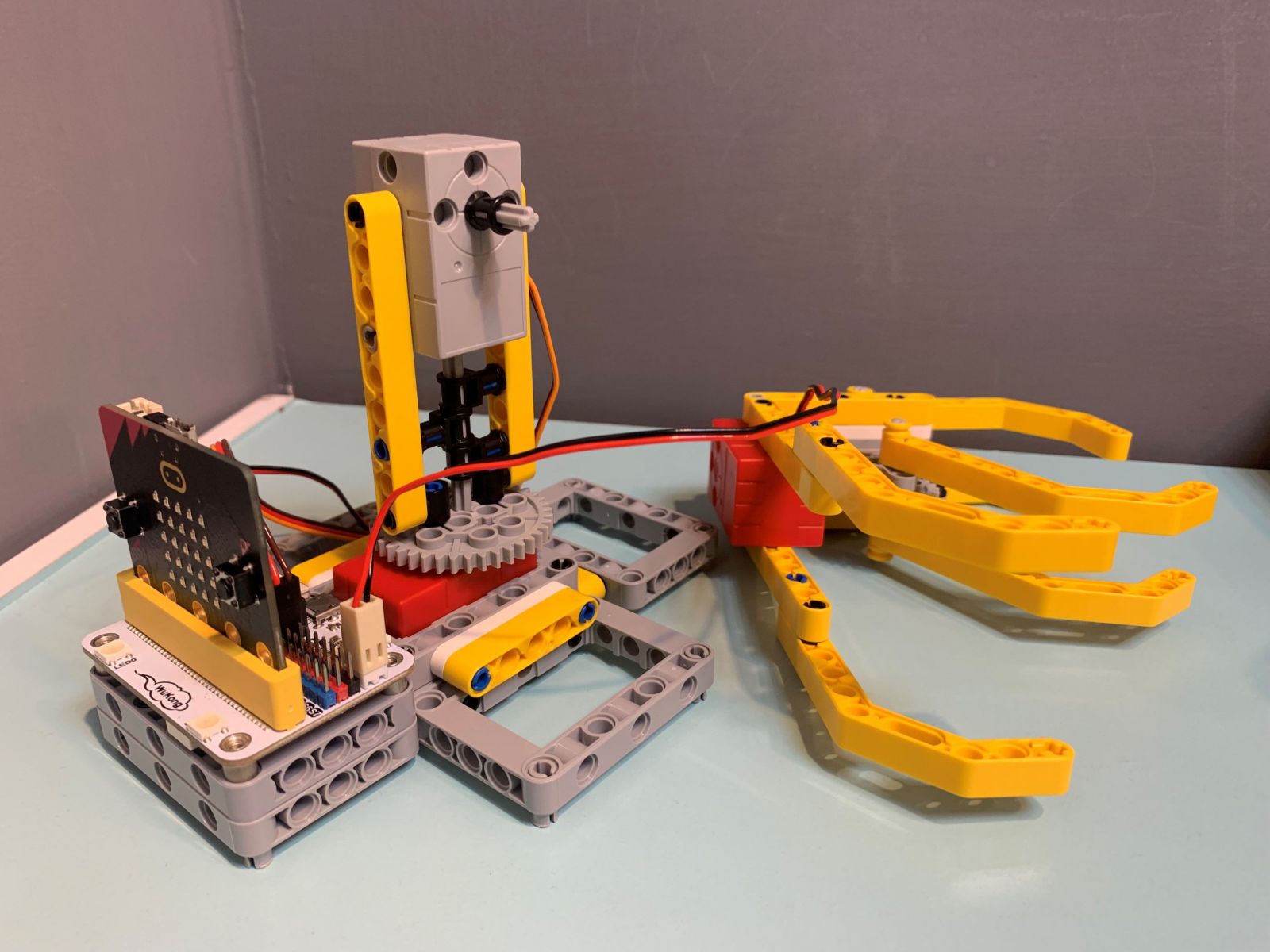
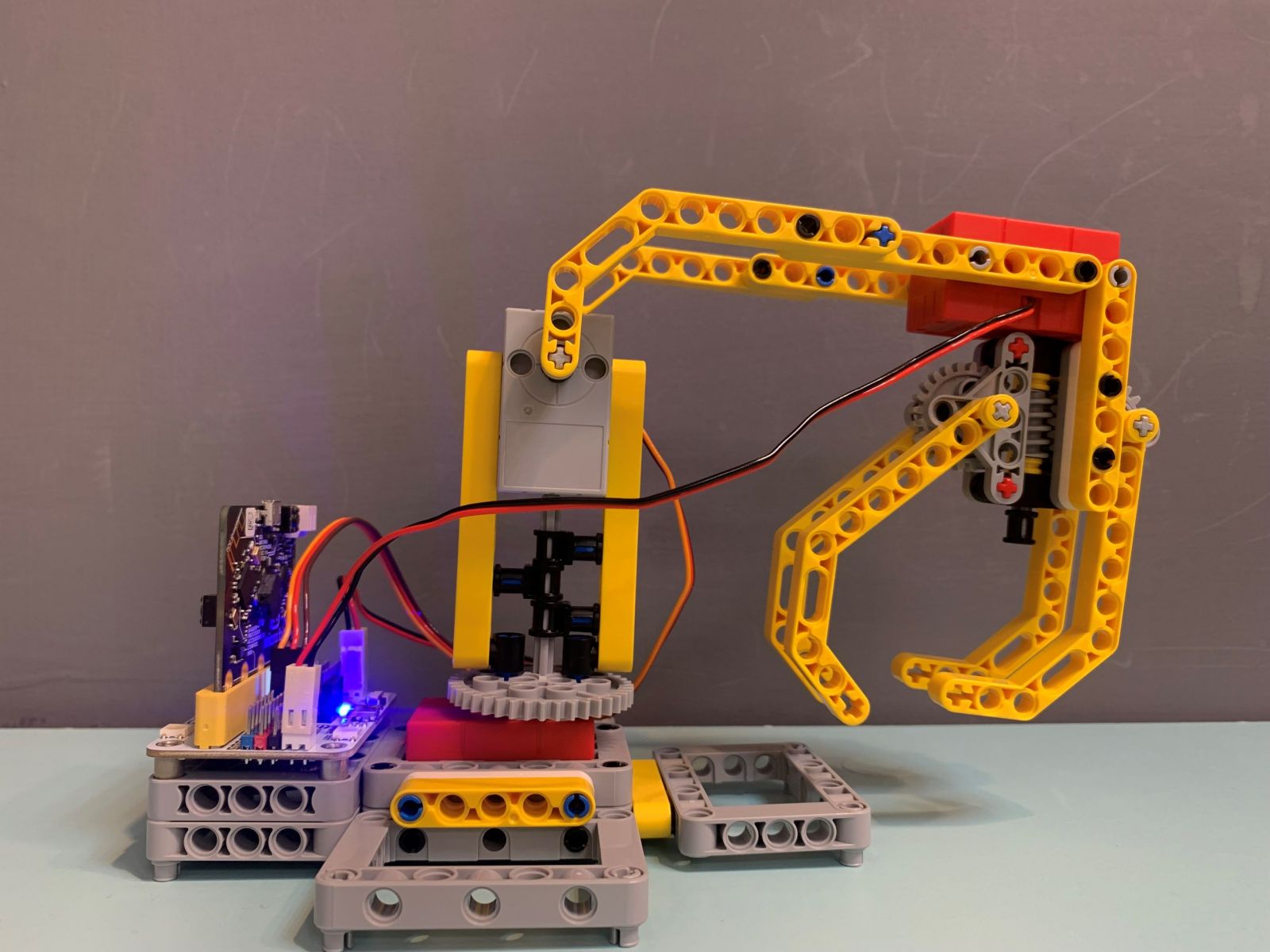
使用 Wonder Building 套件製作機械手臂。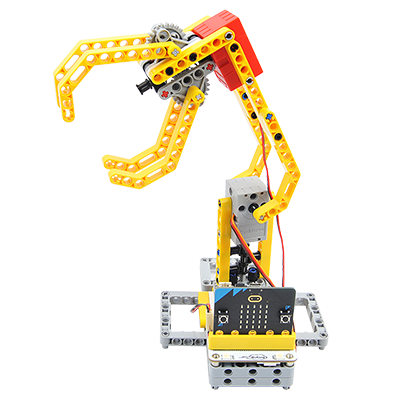
8.2. 所需材料
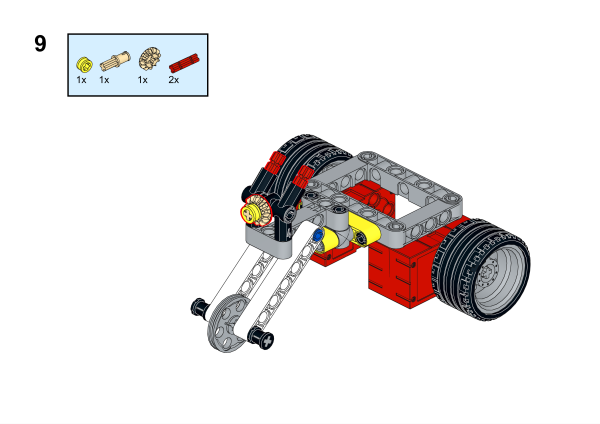
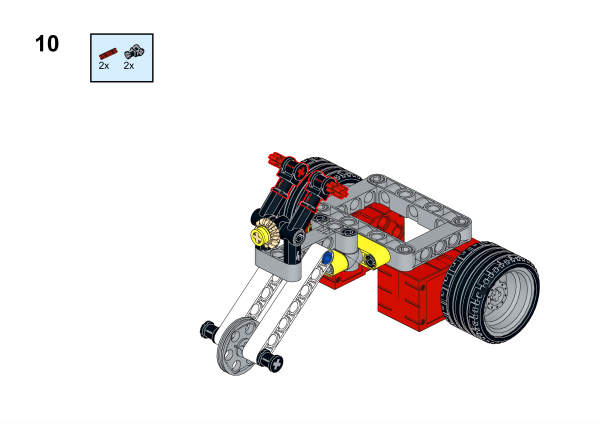
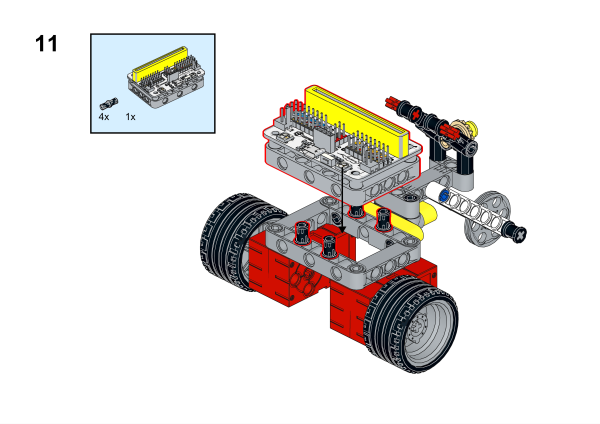
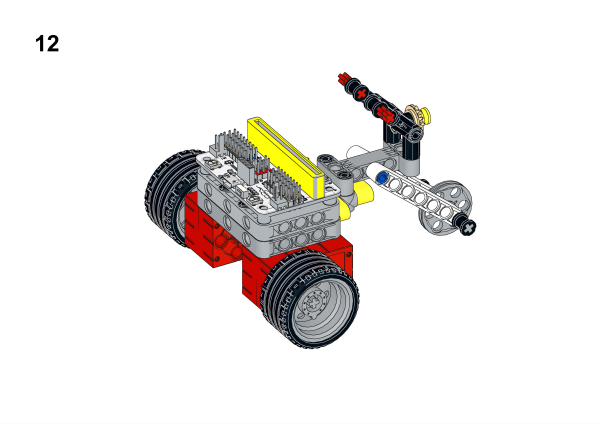
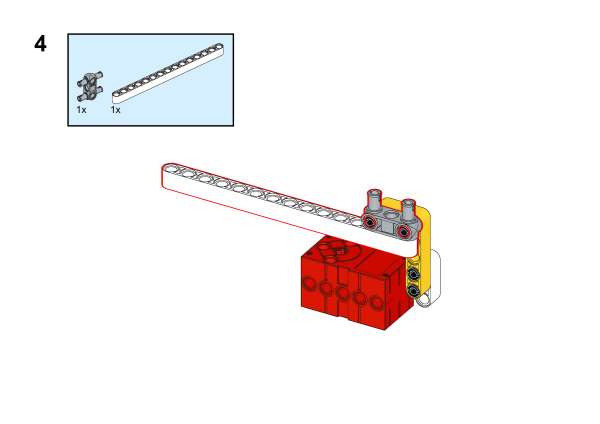
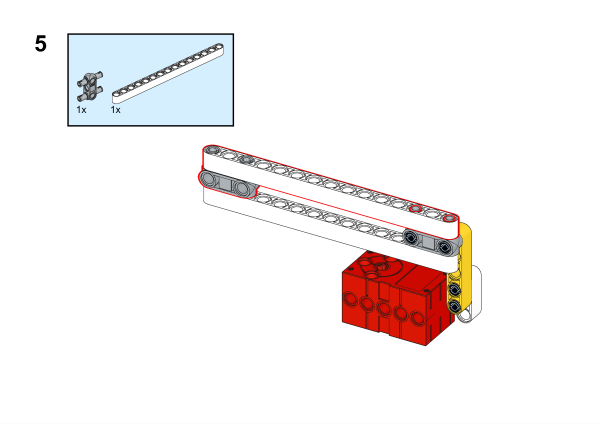
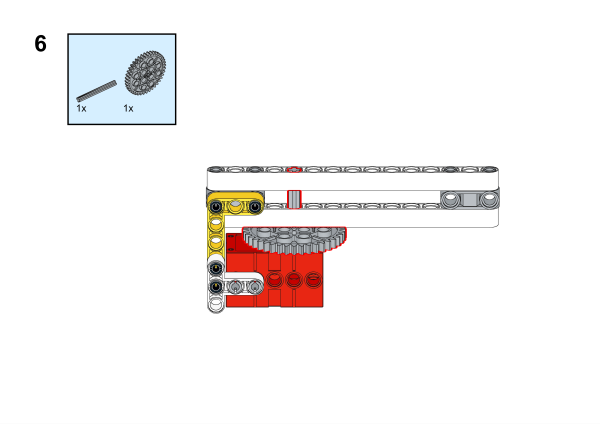
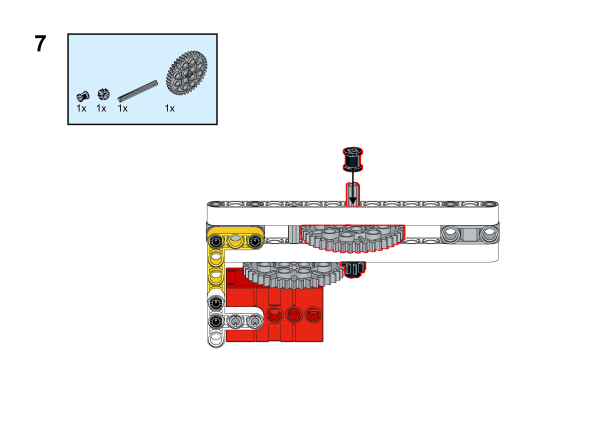
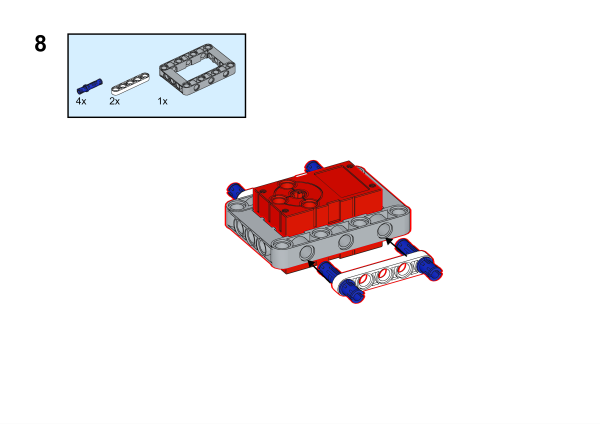
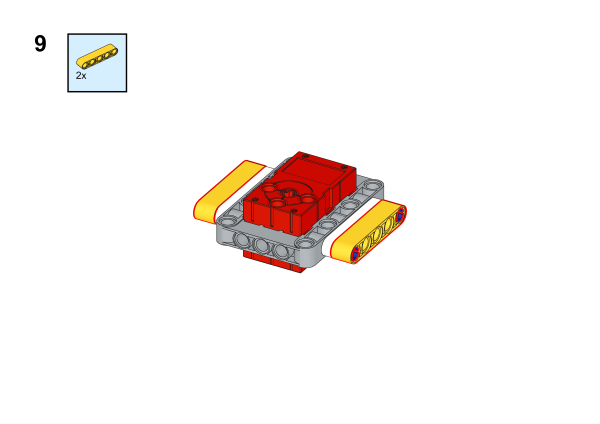
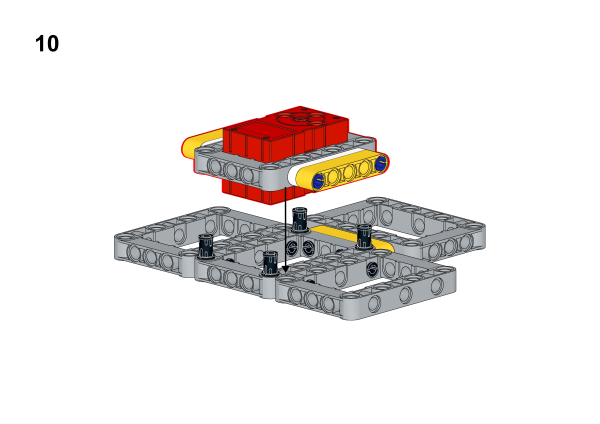
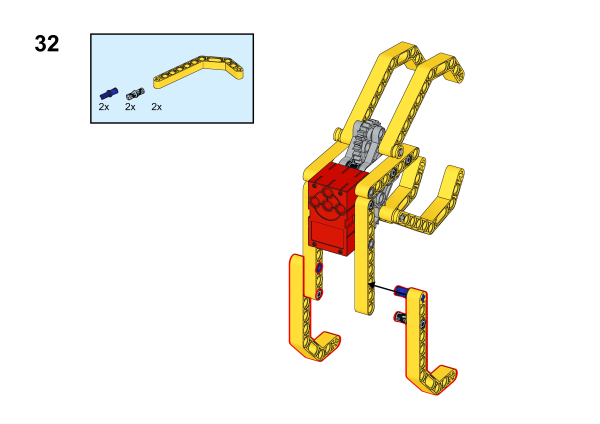
8.3. 組裝步驟 (※步驟2~步驟6為黑色積木)
※步驟11~步驟12為黑色積木。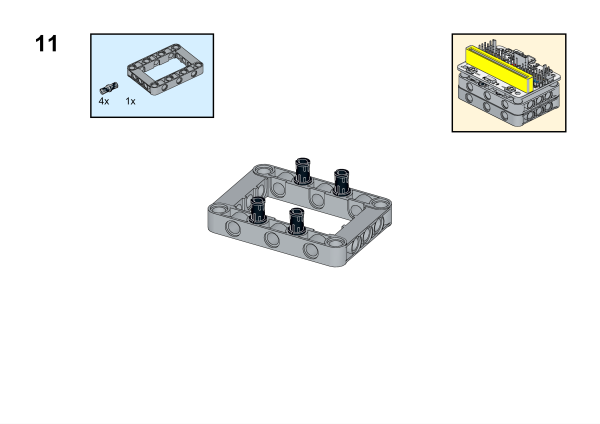
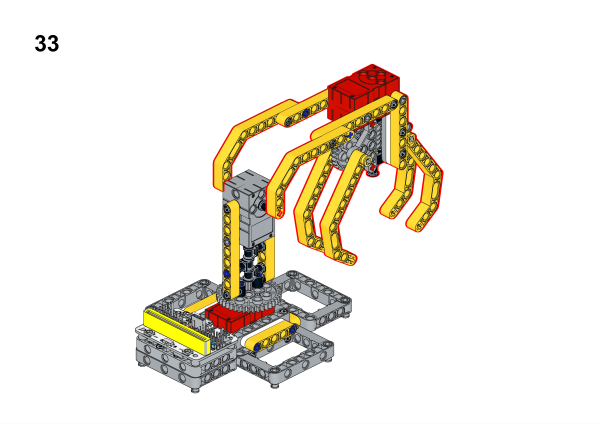

組裝影片連結:https://youtu.be/IRJKXAfJf9M
8.4. 編程平台
Microsoft MakeCode
8.5. 程式
添加擴充程式
先點擊MakeCode中的【Advanced】,再點擊【Extensions】以獲得更多擴充選項。
在對話框中輸入關鍵字:【wukong】並點擊圖案下載。
即可在選單找到下載好的【wukong】擴充程式。
接著再以同樣方式到對話框中輸入關鍵字:【joystickbit】並點擊圖案下載。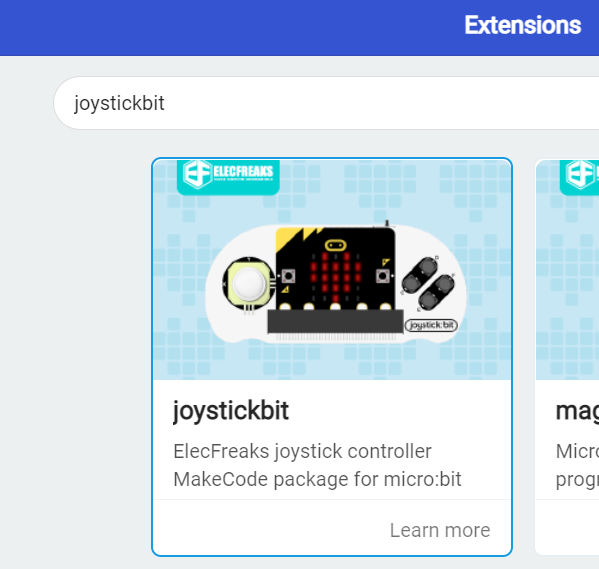
即可在選單找到下載好的【joystickbit】擴充程式。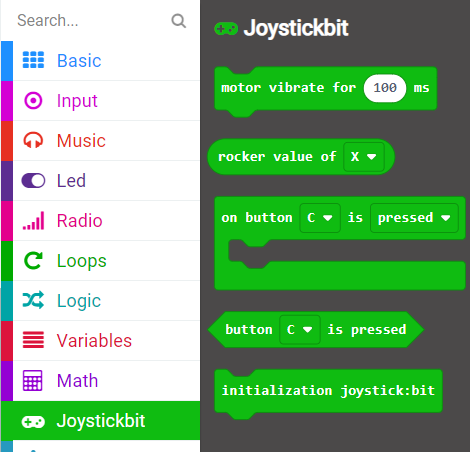
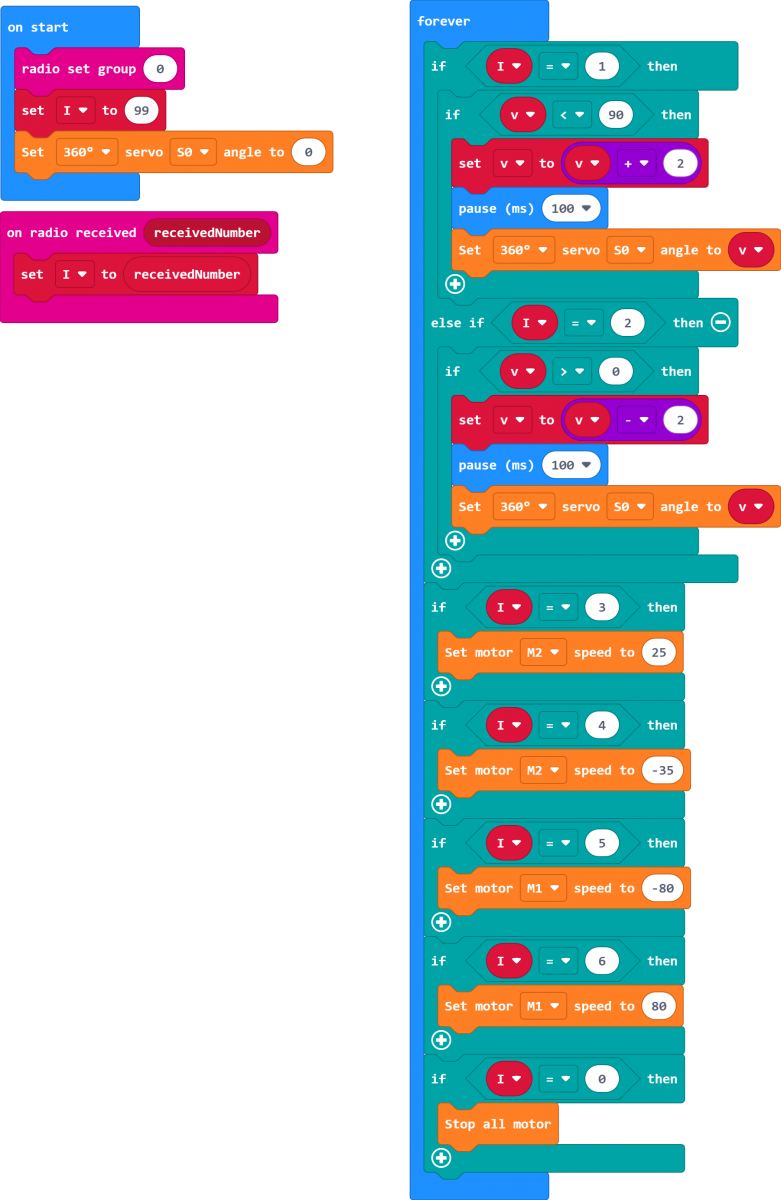
程式
【手把】
在 on start(當啟動時執行) 積木中,置入 initialization joystick:bit 以初始化 joystick:bit。
接著設定 micro:bit 廣播的群組Id(0~255任選),不同micro:bit需在相同群組才能接收或發送廣播。就像廣播、對講機的概念,需要在同個頻率、群組才能收發訊息。此案例使用群組0來設定。
在 forever(重複執行) 積木中,利用 Logic 積木中的 if(如果) 來判斷x和y的數值。x軸數值是透過擴充積木 Joystick:bit 中的 rocker value of x(搖桿x軸的值),而y軸也是一樣的方式。依據x和y的數值大小,我們以 Radio 積木中的 radio send number 發送訊號給機械手臂的micro:bit,執行相對應的命令。例如:當x的數值小過某一角度時,傳送數字4給機械手臂micro:bit;當x的數值大過某一個角度時,傳送數字3給機械手臂micro:bit。
*請注意:Joystick:bit 其x軸和y軸的範圍是0~1023,x軸的數值為:左邊大、右邊小;y軸的數值為:上面大、下面小。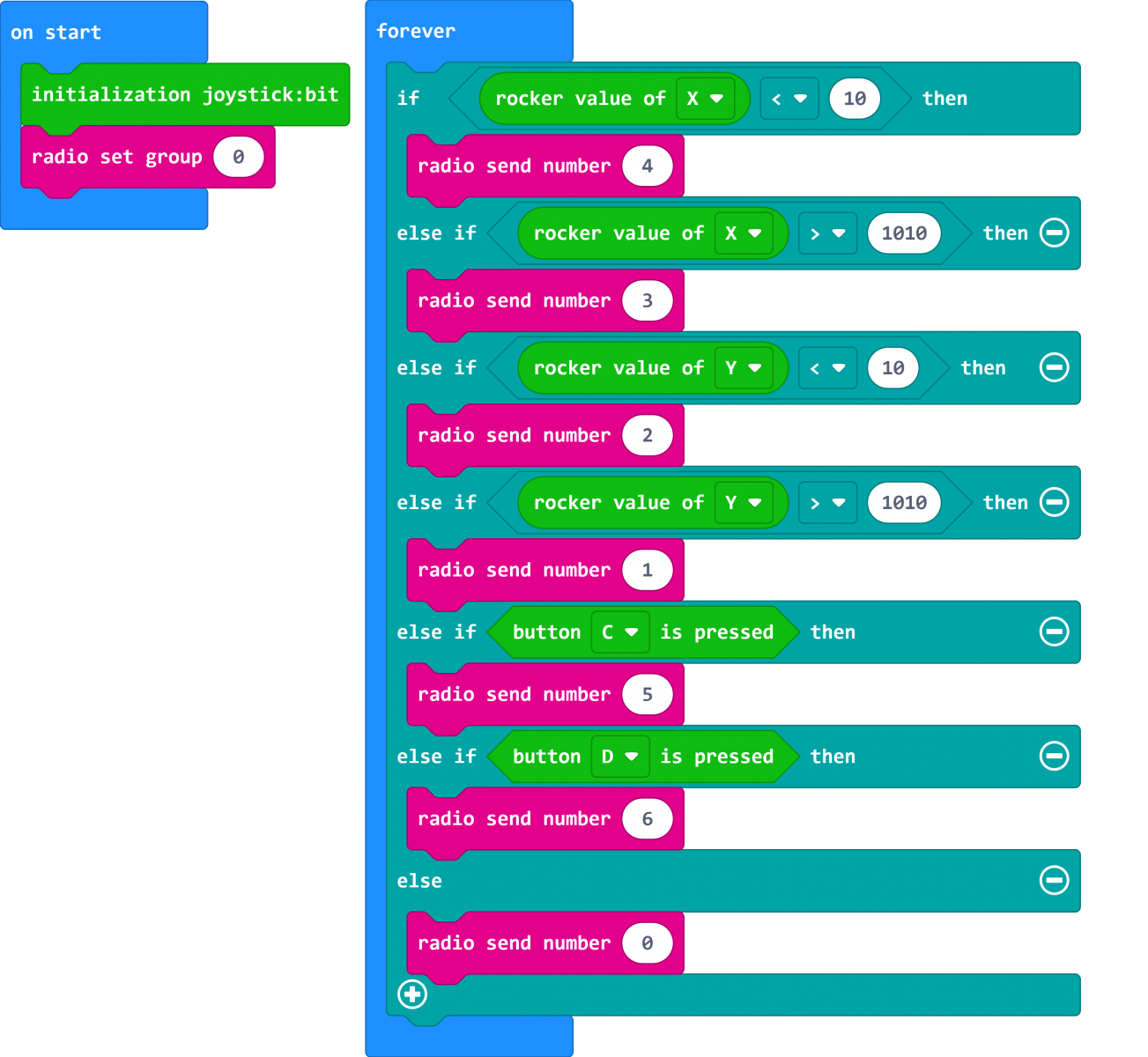
 |  |  |  |  |