PARENTS
親子
TEACHERS
教師
GOODS
產品
OUR ESG
社會責任
CONTACT
聯絡我們
NEWS
最新消息
首頁
代理商品
BBC micro:bit
Strawbotics 吸管機器人
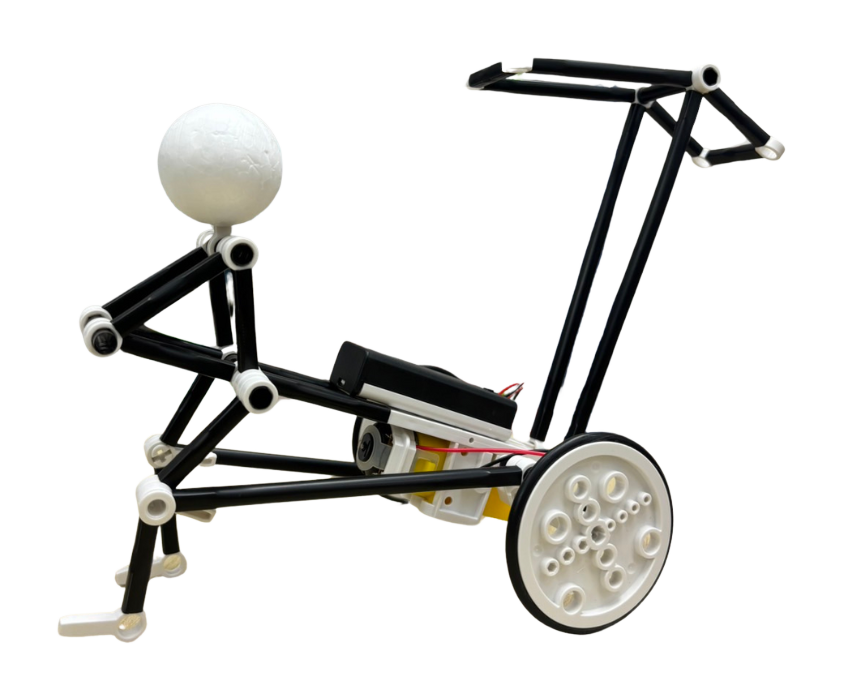
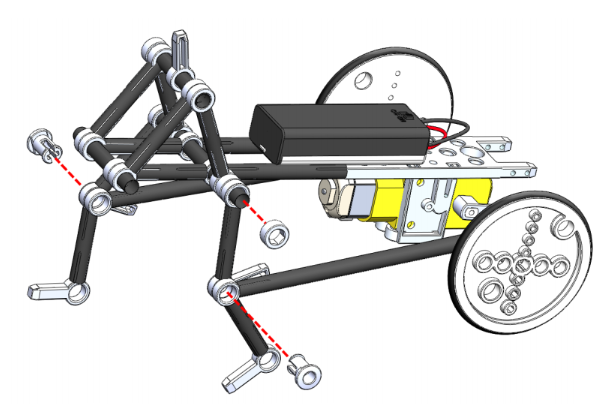
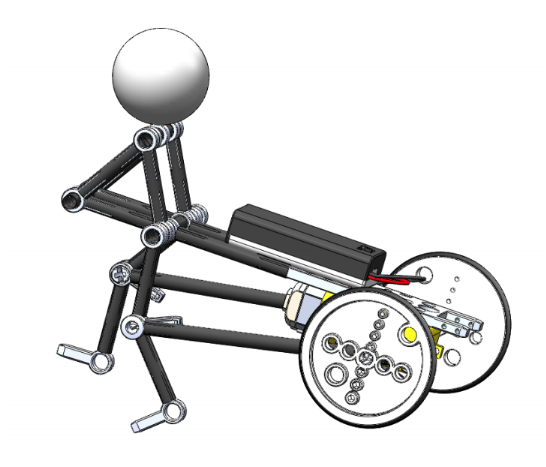
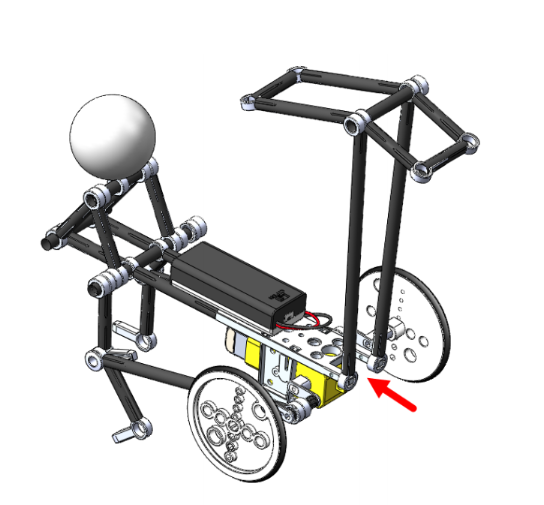
【OST075】MICRO ROBOT輪系吸管機器人V3-人力車
代理商品
【OST075】MICRO ROBOT輪系吸管機器人V3-人力車
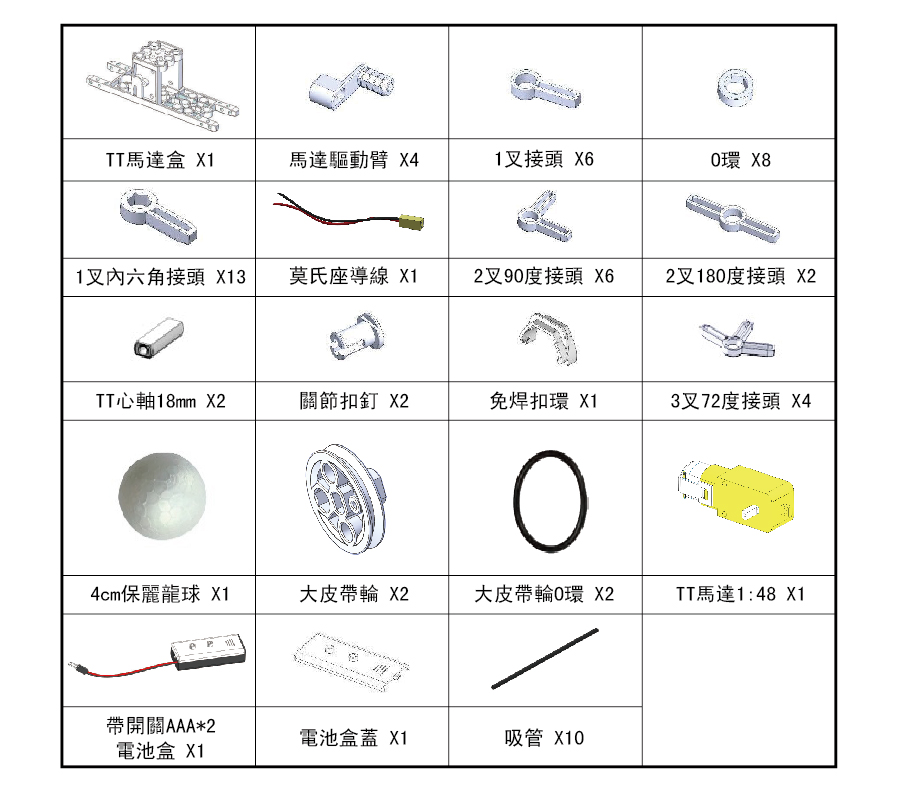
【出貨明細】
TT 馬達盒 x1
馬達驅動臂 x4
1 叉接頭 x6
O 環 x8
內六角 1 叉接頭 x13
2 叉 180 度接頭 x2
3 叉 72 度接頭 x4
TT 心軸 18mm x2
關節扣釘 x2
2 叉 90 度接頭 x6
大皮帶輪 x2
大皮帶輪 O 環 x2
TT 馬達 1:48 x1
帶開關 AAA*2 電池盒 x1
電池盒蓋 x1
免焊扣環 x1
保麗龍球 4cm x1
莫氏座導線 x1
專用吸管 x10
商品編號
OST075
售價
390
數量
庫存:10
加入購物車
立即購買
SHARE:
產品展示 (僅材料包)
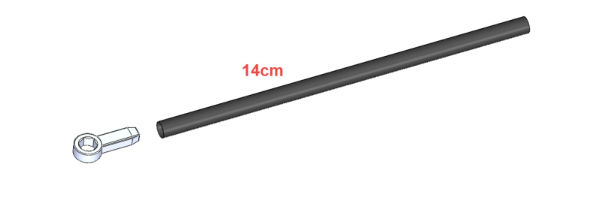
準備材料
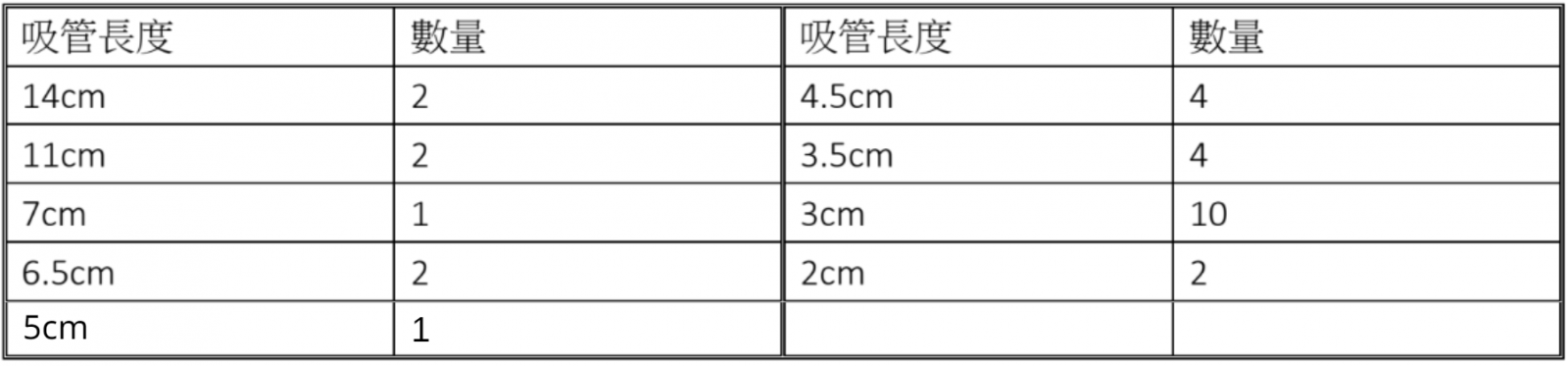
吸管長度
組裝參考步驟
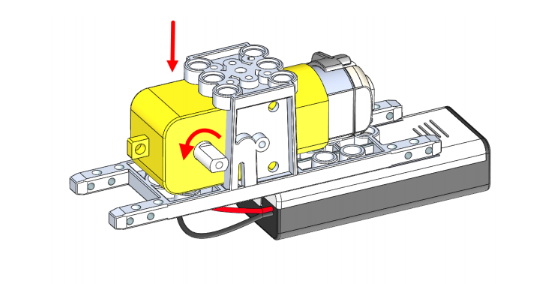
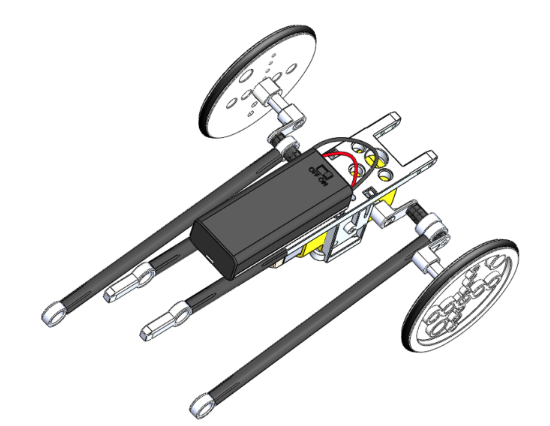
Step.1
A. 電池盒更換上蓋,裝入 AAA*2 電池
B. 免焊扣環連結莫氏座導線與馬達,再接上電池盒
C. 開啟電源開關,確定馬達往前方旋轉
D. 蓋上上蓋。如果轉向相反,將馬達水平翻轉 180 度再蓋上上蓋組合即可
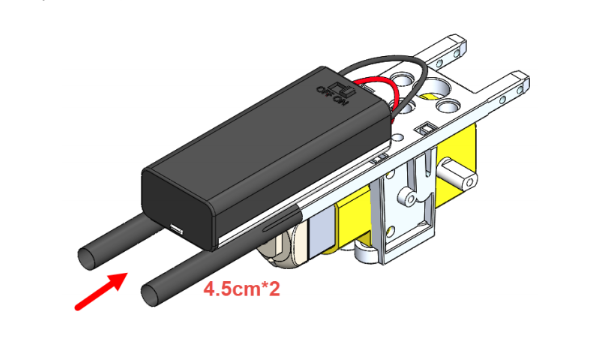
Step.2
組裝 2 支 4.5cm 吸管
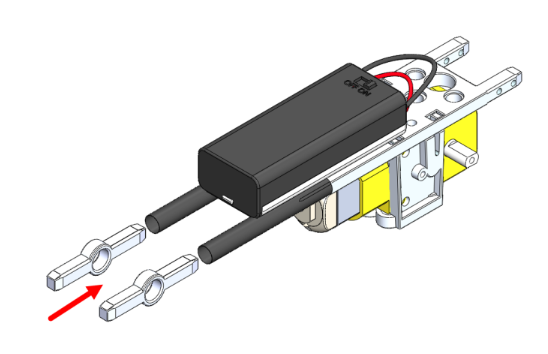
Step.3
組裝 2 只 2 叉 180 度接頭
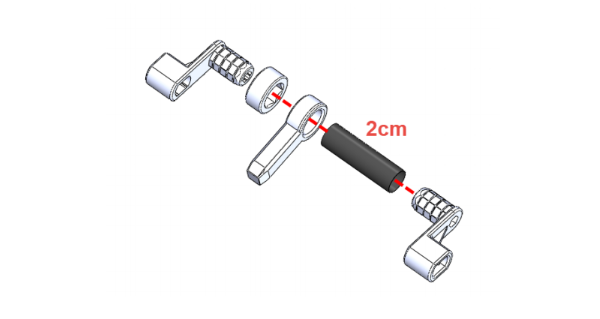
Step.4
使用 2 只馬達傳動臂組裝成曲軸,1 叉接頭做拉桿支點,O 環控制位置。左右邊做 2 組。
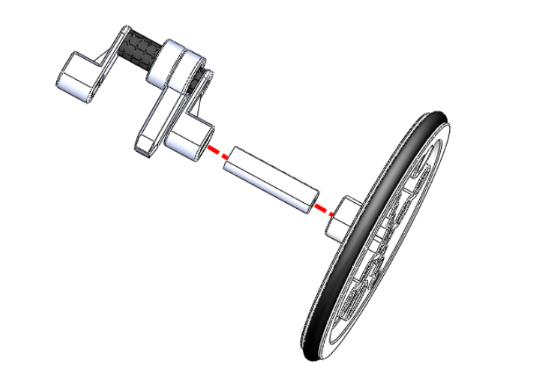
Step.5
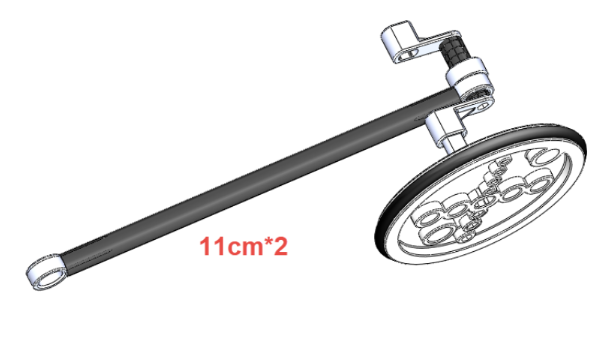
使用 2TT 心軸連接大皮帶輪,左右 2 組
Step.6
使用 1 叉接頭連接 11cm 吸管,完成拉桿;左右 2 組
Step.7
將曲軸組裝於馬達心軸上,左右邊差 180 度
Step.8
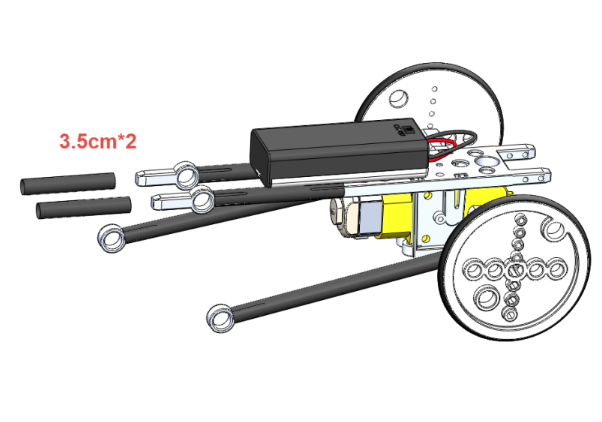
在 2 只 2 叉 180 度接頭,插入 3.5cm 吸管
Step.9
在 2 支 3.5cm 吸管,插入 2 只內六角 1 叉接頭
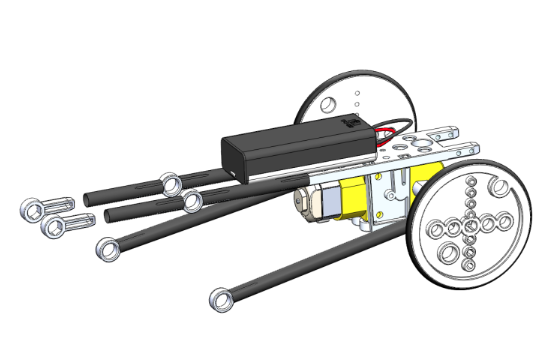
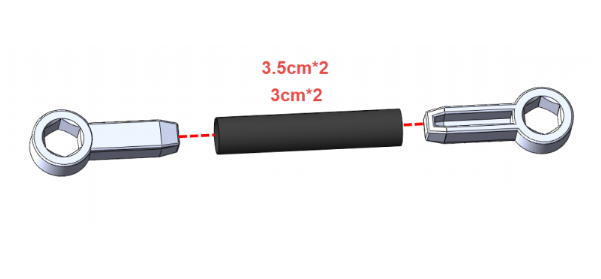
Step.10
用 8 只內六角 1 叉接頭,連接 3.5cm 和 3cm 吸管,各製作 2 組連桿。
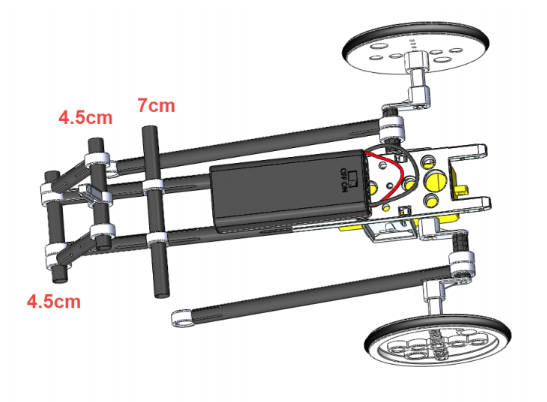
Step.11
用 2 支橫向 4.5cm 吸管,分別將 3.5cm 的連桿橫向組裝,右邊 4.5cm 吸管,插入內六角 1 叉接頭,預備組裝頭部用。另外將 7cm 吸管插入 2 叉 180 度接頭圓孔中
Step.12
將 7cm 吸管二側,套入 2 個 O 環定位
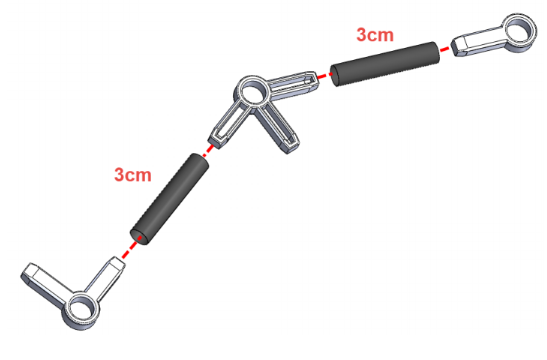
Step.13
用 1 叉接頭、3 叉 72 度接頭、2 叉 90 接頭,連接 2 支 3cm 吸管,製作 2 組腳部。
Step.14
將 2 組腳部,分別以關節扣釘連接拉桿,再以 O 環定位大腿關節。
Step.15
保麗龍球先用小起子挖出小洞,再插入接頭中。主結構完成,請打開電源測試看看成果!
Step.16
使用 14cm 吸管,插入內六角 1 叉接頭,製作 2 支支架
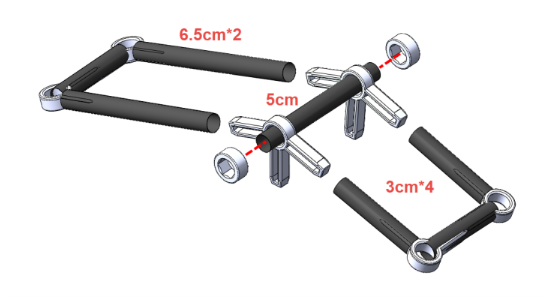
Step.17
組裝遮陽架,如圖 4 支 3cm 吸管,2 支 6.5cm 吸管,分別用 4 只 2 叉 90 度接頭與2 只 3 叉 72 度接頭,組成遮陽架。再穿過 5cm 吸管,2 個 O 環定位
Step.18
遮陽架與 14cm 支架組裝
Step.19
將遮陽架組裝於後方的 2 叉桿上
完成!
【出貨明細】
TT 馬達盒 x1
馬達驅動臂 x4
1 叉接頭 x6
O 環 x8
內六角 1 叉接頭 x13
2 叉 180 度接頭 x2
3 叉 72 度接頭 x4
TT 心軸 18mm x2
關節扣釘 x2
2 叉 90 度接頭 x6
大皮帶輪 x2
大皮帶輪 O 環 x2
TT 馬達 1:48 x1
帶開關 AAA*2 電池盒 x1
電池盒蓋 x1
免焊扣環 x1
保麗龍球 4cm x1
莫氏座導線 x1
專用吸管 x10
返回列表
電話:04-2375-3535
傳真:04-2256-9949
統編:90386785
E-mail:service@oursteam.com.tw
LINE ID:@oursteam
學校機關報價
經銷通路報價
客製產品規劃
師資培訓課程
教師研習辦理
社團營隊活動
關於我們
代理商品
教學資源
最新消息
聯絡我們
購物說明
訂單查詢
付款回覆
Copyright © 奧斯丁國際 All Rights Reserved.