
產品展示.jpg)
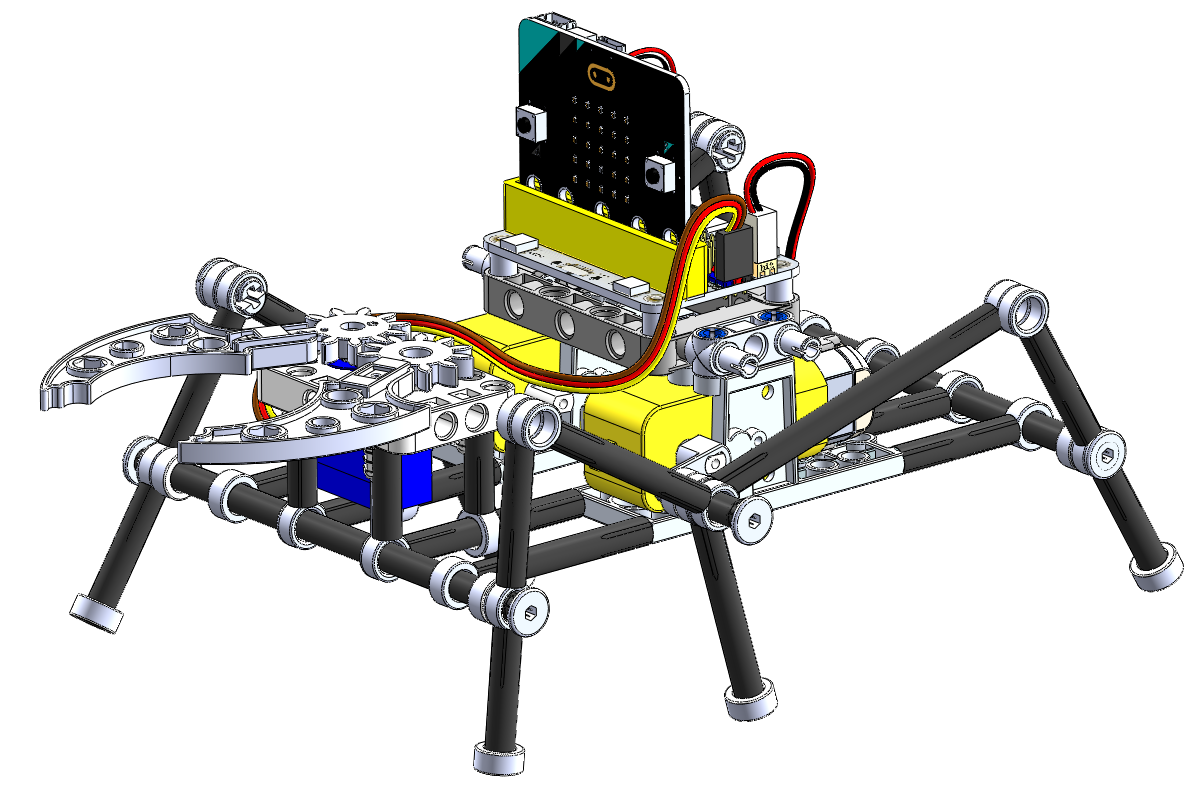
簡介
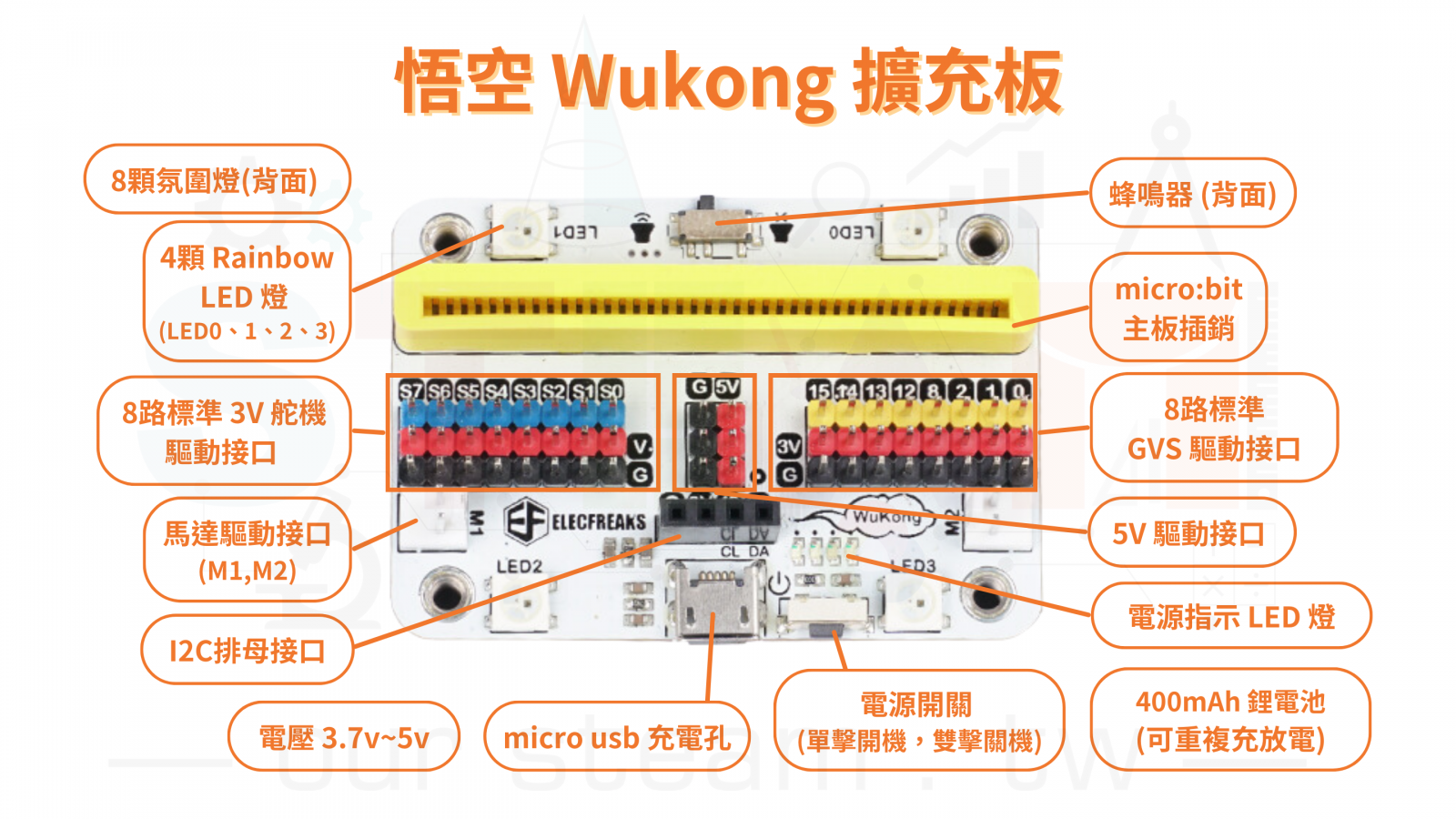
本模型是以雙馬達六足行走機器人為基礎,增加夾爪功能模組,充分發揮Micro:bit與擴展板功能,可以前進、後退與左右轉彎,夾持動作等應用。
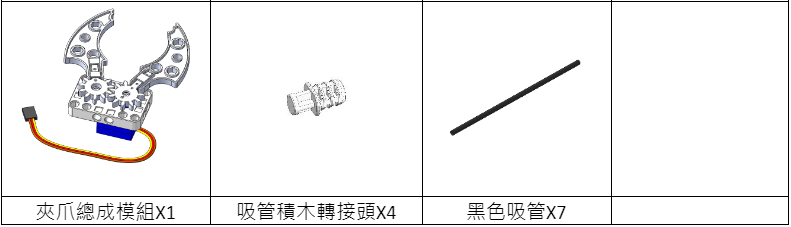
吸管機器人材料準備
.png)
吸管長度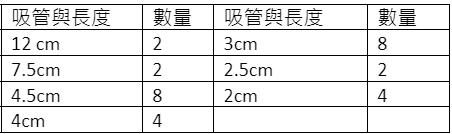
新款吸管機器人特色.png)

.jpg)
.png)
.png)
.png)
.png)
Step2
用3cm與4.5cm組裝前後足支架.png)
Step3
用內六角1叉接頭(A)X6與1叉接頭(B)X2,2叉90度接頭(C)X2,組裝前後支架.png)
Step4
用2支12cm吸管穿過穿過支架,先大約調整2側對稱與距離.png)
Step5
組裝驅動臂與延伸桿.png)
Step6
如圖套上O環定位,一共6個O環。.png)
Step7
前足後足,各組裝4組。.png)
Step8
中足,各組裝2組。.png)
Step9
拉桿,組裝2組。.png)
Step10
使用端面扣釘固定橫桿支點,使用關節扣釘連接連桿做關節。
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
 |  |  |  |  |