
【成品展示】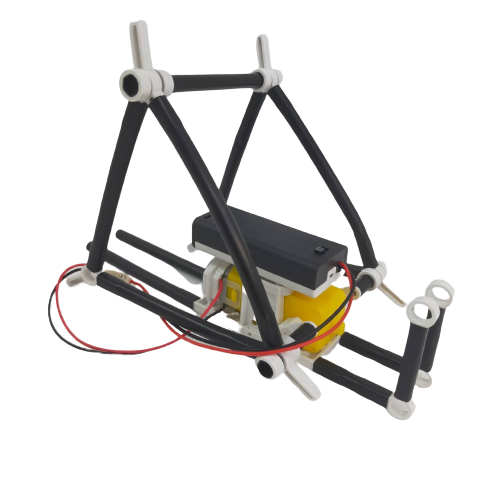
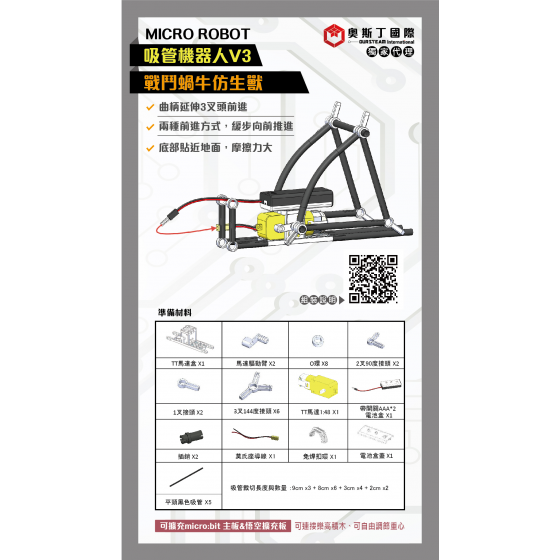
簡介
以曲柄延伸的3叉接頭劃動地面來前進,底部整個貼住地面,摩擦力較大,緩步向前推進。
材料準備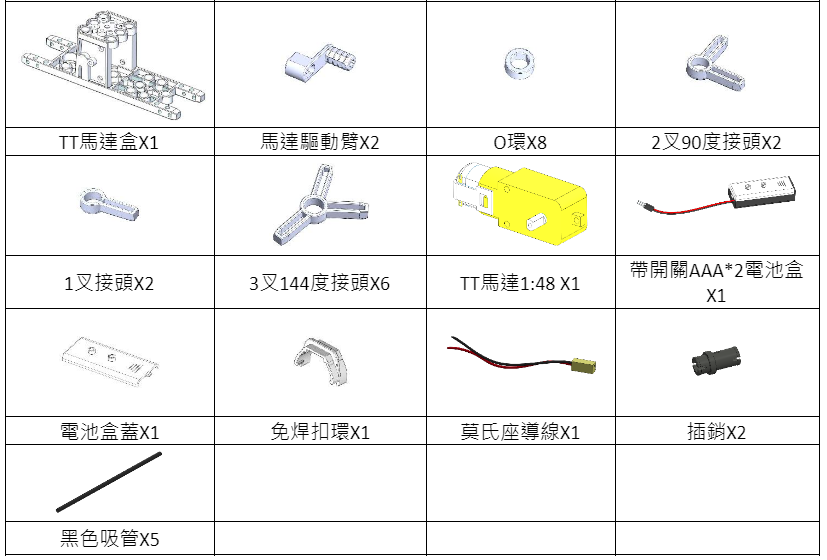
吸管長度.png)
新款吸管機器人特色.png)


.jpg)
組裝參考步驟
Step1
組裝馬達盒。
A.馬達置於馬達盒底板上,注意方向。.png)
B.從上方將馬達盒上蓋輕輕壓入,卡榫具有防呆設計,正確方向位置可以輕鬆組合。.png)
C.將導線端,從上穿入馬達電源銅片小孔。.png)
D.將免焊扣環確實卡入卡溝,固定導線。.png)
Step2
組裝3cm與8cm延伸桿,1叉接頭做眼睛造型用。.jpg)
Step3
組裝驅動臂與延伸桿2cm。.jpg)
Step4
延伸桿O環定位。.jpg)
Step5
組裝蝸牛外殼,將各連接件輕輕組裝,吸管先不要組到底。
※注意接頭方向.jpg)
Step6
使用9cm吸管連接,再慢慢組裝到底,吸管會稍微彎曲。
Step7
外殼與驅動臂以2個O環定位,上方以9cm吸管穿過,分別以4個O環定位。.jpg)
Step7.1
電池版本完成圖
Step8
組裝插銷。.jpg)
.jpg)
.jpg)
.jpg)
 |  |  |  |  |