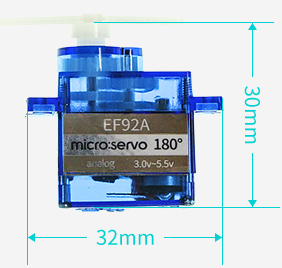
【特點】低工作電壓兼容3V-5.5V(至少2.7V),專為micro:bit設計。
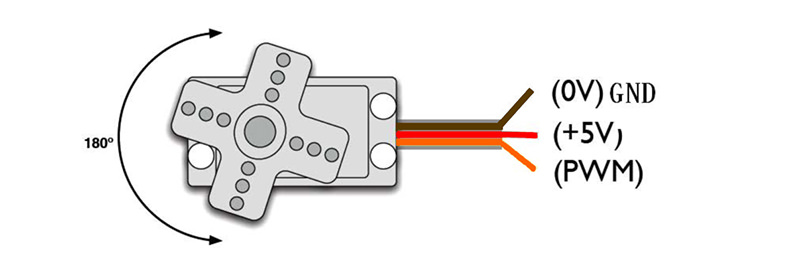
伺服馬達
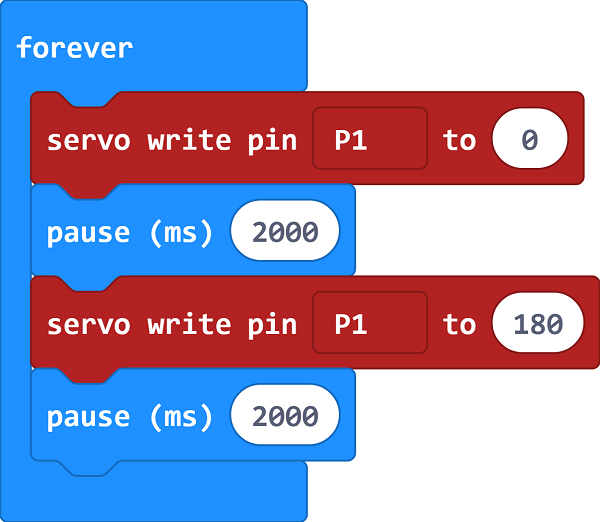
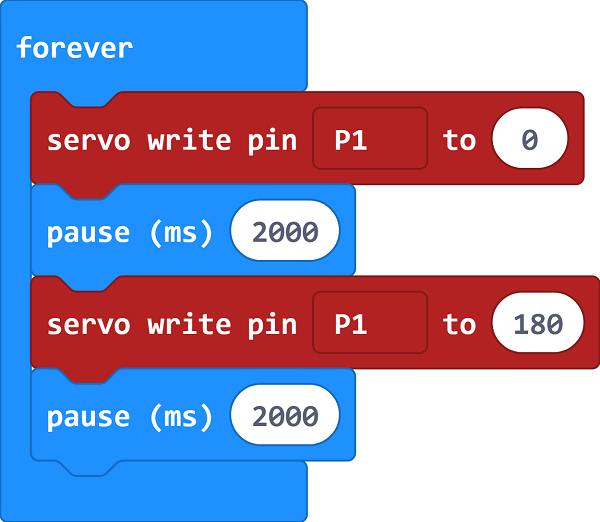
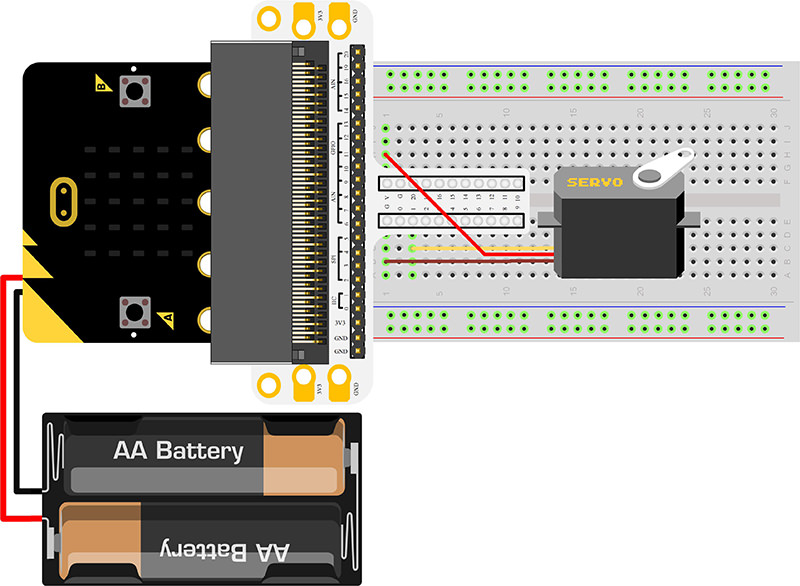
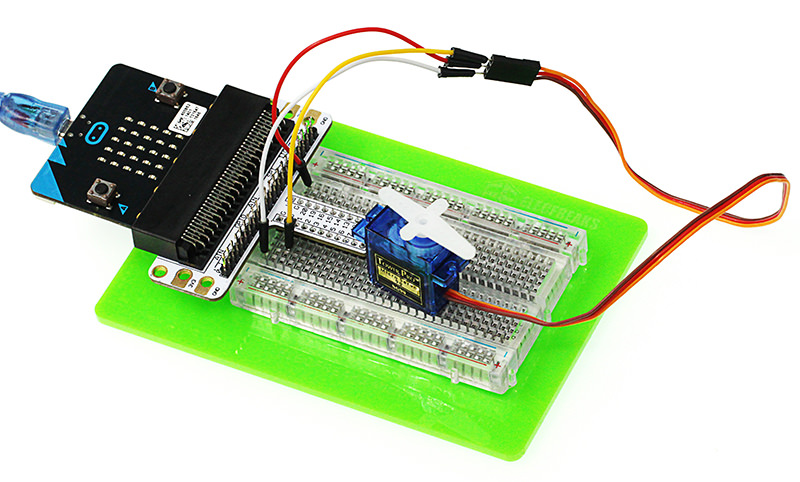
1.介紹伺服是一種位置(角度)伺服驅動器。它適用於恆定角度變化的控制系統,並且可以保持其狀態。在本實驗中,我們將使用micro:bit使伺服器在行程範圍內循環旋轉。
參考連結:https://makecode.microbit.org/_52MVspRmRWjc5.結果我們可以看到伺服旋轉角度範圍是0度到180度。




.jpeg)




.png)